一种轨道车辆充电机输出电流控制系统及控制方法与流程
1.本发明涉及充电机控制技术领域,尤其是一种轨道车辆充电机输出电流控制系统及控制方法。
背景技术:
2.在内燃机车、地铁车辆和动车组列车等所有轨道交通车辆中均配置了车载蓄电池,其作用是在未通高压的情况下为车辆低压系统的负载提供电源,便于车辆的维护、调试等工作。车辆通高压之后需要利用车载充电机为蓄电池充电,以确保蓄电池的可持续使用。车载充电机的作用就是车辆通高压后为车载蓄电池补充能量,同时为低压负载供电。
3.车载充电机通常具备输出恒压控制功能和输出电流限流控制功能。恒压控制功能是为了保证给负载提供的电源电压稳定,使负载可稳定工作不损坏。输出电流限流控制功能是防止充电机的输出总电流过大,对输出电流进行限制,该功能对于延长充电机寿命以及保护低压供电线路避免发生过流发热,防止造成更大范围的生命财产损失具有至关重要的作用。
4.如图1所示,现有车载充电机的输出电流限流控制,通过传感器直接采集输出端的总电流id,反馈给控制器,通过负反馈调节,实现对输出电流的控制。
5.轨道车辆车载充电机的特点是输出电压低,电流大。例如在crh5型车动车组上每节车配置一台15kw,24v的充电机。其输出总电流高达600a,为确保电缆不会异常发热,需要配置两根95mm2的机车电缆传输电流。无论是检测电流的范围还是穿过电流传感器的线缆的规格,对于输出电流传感器的选型、安装维护造成极大的困难,可满足设计要求的传感器重量、尺寸大,价格较高。
技术实现要素:
6.本发明针对以上问题提出了一种轨道车辆充电机输出电流控制系统。
7.本发明采用的技术手段如下:
8.一种轨道车辆充电机输出电流控制系统,包括三相整流桥模块、三相滤波器模块、igbt逆变器模块、隔离变压器、电压电流输出模块以及反馈控制模块;
9.所述三相整流桥模块的输出端与所述三相滤波器模块的输入端连接,所述三相滤波器模块的输出端与所述igbt逆变器模块的输入端连接,所述igbt逆变器模块的输出端与所述隔离变压器的原边连接,所述隔离变压器的副边与电压电流输出模块的输入端连接;
10.所述反馈控制模块包括原边电流采集模块、输出电压采集模块、电流电压保护信号采集模块、数据处理模块以及隔离驱动模块;
11.所述原边电流采集模块与设置在所述隔离变压器的原边上的电流传感器连接,用于采集所述隔离变压器的原边上的电流并计算所述电压电流输出模块的输出电流;
12.所述输出电压采集模块与电压电流输出模块连接,用于采集所述电压电流输出模块的输出电压;
13.所述电流电压保护信号采集模块与所述三相滤波器模块连接,用于采集三相滤波器模块输出的电流和电压;
14.所述数据处理模块与所述原边电流采集模块、输出电压采集模块、电流电压保护信号采集模块以及隔离驱动模块连接,用于根据所述电压电流输出模块的输出电流、所述电压电流输出模块的输出电压以及所述三相滤波器模块输出的电流和电压调整用于控制igbt逆变模块的控制信号,并通过所述隔离驱动模块驱动所述igbt逆变器模块。
15.进一步地,所述原边电流采集模块通过以下方法计算所述电压电流输出模块的输出电流:
16.原边电流采集模块以设定频率采集隔离变压器原边的电流值i
pre
(n);
17.通过公式(1)计算隔离变压器的原边电流有效值:
[0018][0019]
其中,i
prms
为原边电流有效值,i
pre
(n)为第n个采样点采集到的原边电流值;
[0020]
通过公式(2)计算电压电流输出模块的输出电流:
[0021]iout
≈2
×k×iprms
ꢀꢀꢀꢀꢀꢀꢀ
(2)
[0022]
其中,i
out
为输出模块的输出电流,k为变压器变比。
[0023]
进一步地,所述数据处理模块采用公式(3)的增量式pid算法调整用于控制igbt逆变模块的控制信号,
[0024]
δuk=u
k-u
k-1
=k
p
(e
k-e
k-1
)+k
iek
+kd(e
k-2e
k-1
+e
k-2
)=d0ek+d1e
k-1
+d2e
k-2
ꢀꢀ
(3)
[0025]
式中:d0=k
p
+ki+kd,d1=-(k
p
+2kd),d2=kd,δuk为控制对象增量,uk为本控制周期控制对象值,u
k-1
为上个控制周期控制对象值,k
p
为比例系数,ki为积分系数,kd为微分系数,ek为本控制周期误差值,e
k-1
为上个控制周期误差值,e
k-2
为上上个控制周期误差值。
[0026]
一种轨道车辆充电机输出电流控制方法,包括以下步骤:
[0027]
步骤1、采集隔离变压器原边的电流、电压电流输出模块的输出电压以及三相滤波器模块输出的电流和电压;
[0028]
步骤2、根据所述隔离变压器原边的电流计算电压电流输出模块的输出电流;
[0029]
步骤3、根据所述电压电流输出模块的输出电压、电压电流输出模块的输出电流以及所述三相滤波器模块的电流和电压调整用于控制igbt逆变模块的控制信号;
[0030]
步骤4、将调整后的igbt逆变模块的控制信号输入隔离驱动模块以控制gbt逆变器模块。
[0031]
进一步地,根据所述隔离变压器原边的电流计算电压电流输出模块的输出电流包括以下步骤;
[0032]
以设定频率采集隔离变压器原边的电流值i
pre
(n);
[0033]
通过公式(1)计算隔离变压器的原边电流有效值:
[0034][0035]
其中,i
prms
为原边电流有效值,i
pre
(n)为第n个采样点采集到的原边电流值;
[0036]
通过公式(2)计算电压电流输出模块的输出电流:
[0037]iout
≈2
×k×iprms
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0038]
其中,i
out
为输出模块的输出电流,k为变压器变比。
[0039]
进一步地,采用公式(3)的增量式pid算法调整用于控制igbt逆变模块的控制信号,
[0040]
δuk=u
k-u
k-1
=k
p
(e
k-e
k-1
)+k
iek
+kd(e
k-2e
k-1
+e
k-2
)=d0ek+d1e
k-1
+d2e
k-2
ꢀꢀ
(3)
[0041]
式中:d0=k
p
+ki+kd,d1=-(k
p
+2kd),d2=kd,δuk为控制对象增量,uk为本控制周期控制对象值,u
k-1
为上个控制周期控制对象值,k
p
为比例系数,ki为积分系数,kd为微分系数,ek为本控制周期误差值,e
k-1
为上个控制周期误差值,e
k-2
为上上个控制周期误差值。
[0042]
与现有技术比较,本发明公开的轨道车辆充电机输出电流控制系统具有以下有益效果:由于设置了反馈控制模块,反馈控制模块能够采集隔离变压器原边的电流和电压电流输出模块的输出电压,并根据采集的电流和电压对igbt逆变器模块进行控制,本技术由于采集变压器原边的电流,因此不需要在输出模块上设置电流传感器,即充电机不必再加装笨重、昂贵的输出电流传感器,实现了无输出电流传感器下的输出电流控制,降低了充电机的重量和成本。
附图说明
[0043]
图1为现有技术的轨道车辆充电机输出电流控制系统的原理图;
[0044]
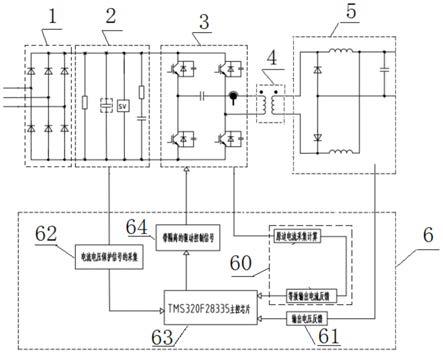
图2为本发明公开的轨道车辆充电机输出电流控制系统的原理图;
[0045]
图3为电流电压反馈控制模块对隔离变压器原边的电流采集示意图;
[0046]
图4为本发明中进行输出电压电流控制的双闭环串级控制系统结构框图;
[0047]
图5为本发明公开的轨道车辆充电机输出电流控制方法的流程图;
[0048]
图6为本发明公开的实施例中输入电压、输出电压的仿真图。
[0049]
图中:1、三相整流桥模块,2、三相滤波器模块,3、igbt逆变器模块,4、隔离变压器,5、电压电流输出模块,6、反馈控制模块,60、原边电流采集模块,61、输出电压采集模块,62、电流电压保护信号采集模块,63、数据处理模块,64、隔离驱动模块。
具体实施方式
[0050]
如图2所示为本发明公开的轨道车辆充电机输出电流控制系统,包括三相整流桥模块1、三相滤波器模块2、igbt逆变器模块3、隔离变压器4、电压电流输出模块5以及反馈控制模块6;
[0051]
所述三相整流桥模块1的输出端与所述三相滤波器模块2的输入端连接,所述三相滤波器模块2的输出端与所述igbt逆变器模块3的输入端连接,所述igbt逆变器模块3的输出端与所述隔离变压器4的原边连接,所述隔离变压器4的副边与电压电流输出模块5的输入端连接,本实施例中,电压电流输出模块包括两个二极管、两个电感以及输出电容;
[0052]
所述反馈控制模块6包括原边电流采集模块60、输出电压采集模块61、电流电压保护信号采集模块62、数据处理模块63以及隔离驱动模块64;
[0053]
所述原边电流采集模块60与设置在所述隔离变压器4的原边上的电流传感器连接,用于采集所述隔离变压器4的原边上的电流并计算所述电压电流输出模块的输出电流;
[0054]
所述输出电压采集模块61与电压电流输出模块5连接,用于采集所述电压电流输出模块的输出电压;
[0055]
所述电流电压保护信号采集模块62与所述三相滤波器模块2连接,用于采集三相滤波器模块输出的电流和电压;
[0056]
所述数据处理模块63与所述原边电流采集模块60、输出电压采集模块61、电流电压保护信号采集模块62以及隔离驱动模块64连接,隔离驱动模块64的输出端与igbt逆变器模块的控制端连接,数据处理模块63用于根据所述电压电流输出模块的输出电流、所述电压电流输出模块的输出电压以及所述三相滤波器模块输出的电流和电压调整用于控制igbt逆变模块的控制信号,并通过所述隔离驱动模块驱动所述igbt逆变器模块。
[0057]
具体地,如图3所示,本发明中,所述原边电流采集模块通过以下方法计算所述电压电流输出模块的输出电流:
[0058]
原边电流采集模块以设定频率采集隔离变压器原边的电流值i
pre
(n);
[0059]
通过公式(1)计算隔离变压器的原边电流有效值:
[0060][0061]
其中,i
prms
为原边电流有效值,i
pre
(n)为第n个采样点采集到的原边电流值;
[0062]
通过公式(2)计算电压电流输出模块的输出电流:
[0063]iout
≈2
×k×iprms
ꢀꢀꢀꢀꢀꢀꢀ
(2)
[0064]
其中,i
out
为输出模块的输出电流,k为变压器变比。
[0065]
即隔离变压器原边虽然为交流电流,但是本发明中通过密集采样,计算出该电流的有效值,然后通过主电路中的电流比例关系等效计算出总输出电流值,将该等效电流值反馈给控制器,从而实现在无输出电流传感器的情况下的输出电流等效控制。
[0066]
通过求出的原边电流有效值i
prms
并根据所求出的与输出电流的线性关系对输出总电流进行控制,具体如下,本发明采用双闭环串级控制系统的对其进行控制。
[0067]
在本实施例中,如图4所示,采用了电压外环和电流内环的串级调节控制。加入电流内环可使系统的动态响应加快,串级调节使整个系统的负载响应特性有了显著的提高。其中电压外环采用pid调节器,电感电流内环采用pi调节器。增量式pid算法公式如公式(3)所示,以进行调整用于控制igbt逆变模块的控制信号,
[0068]
δuk=u
k-u
k-1
=k
p
(e
k-e
k-1
)+k
iek
+kd(e
k-2e
k-1
+e
k-2
)=d0ek+d1e
k-1
+d2e
k-2
ꢀꢀ
(3)
[0069]
式中:d0=k
p
+ki+kd,d1=-(k
p
+2kd),d2=kd,δuk为控制对象增量,uk为本控制周期控制对象值,u
k-1
为上个控制周期控制对象值,k
p
为比例系数,ki为积分系数,kd为微分系数,ek为本控制周期误差值,e
k-1
为上个控制周期误差值,e
k-2
为上上个控制周期误差值,当k=1时,e
k-1
和e
k-2
设置为0。
[0070]
本发明公开的轨道车辆充电机输出电流控制系统由于设置了反馈控制模块,反馈控制模块能够采集隔离变压器原边的电流,并根据采集的电流和电压对输出电流和电压进行控制,本技术由于采集变压器原边的电流,因此不需要在输出模块上设置电流传感器,即充电机不必再加装笨重、昂贵的输出电流传感器,实现了无输出电流传感器下的输出电流控制,降低了充电机的重量和成本。
[0071]
如图5所示为本发明公开的一种轨道车辆充电机输出电流控制方法,包括以下步骤:
[0072]
步骤1、采集隔离变压器原边的电流、电压电流输出模块的输出电压以及三相滤波器模块输出的电流和电压;
[0073]
步骤2、根据所述隔离变压器原边的电流计算电压电流输出模块的输出电流;
[0074]
步骤3、根据所述电压电流输出模块的输出电压、电压电流输出模块的输出电流以及所述三相滤波器模块的电流和电压调整用于控制igbt逆变模块的控制信号;
[0075]
步骤4、将调整后的igbt逆变模块的控制信号输入隔离驱动模块以控制gbt逆变器模块。
[0076]
进一步地,根据所述隔离变压器原边的电流计算电压电流输出模块的输出电流包括以下步骤;
[0077]
以设定频率采集隔离变压器原边的电流值i
pre
(n);
[0078]
通过公式(1)计算隔离变压器的原边电流有效值:
[0079][0080]
其中,i
prms
为原边电流有效值,i
pre
(n)为第n个采样点采集到的原边电流值;
[0081]
通过公式(2)计算电压电流输出模块的输出电流:
[0082]iout
≈2
×k×iprms
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0083]
其中,i
out
为输出模块的输出电流,k为变压器变比。
[0084]
进一步地,采用公式(3)的增量式pid算法调整用于控制igbt逆变模块的控制信号,
[0085]
δuk=u
k-u
k-1
=k
p
(e
k-e
k-1
)+k
iek
+kd(e
k-2e
k-1
+e
k-2
)=d0ek+d1e
k-1
+d2e
k-2
ꢀꢀ
(3)
[0086]
式中:d0=k
p
+ki+kd,d1=-(k
p
+2kd),d2=kd,δuk为控制对象增量,uk为本控制周期控制对象值,u
k-1
为上个控制周期控制对象值,k
p
为比例系数,ki为积分系数,kd为微分系数,ek为本控制周期误差值,e
k-1
为上个控制周期误差值,e
k-2
为上上个控制周期误差值,当k=1时,e
k-1
和e
k-2
设置为0。
[0087]
本发明公开的轨道车辆充电机输出电流控制方法由于通过采集隔离变压器原边的电流,并根据采集的电流和电压对输出电流和电压进行控制,因此不需要在输出模块上设置电流传感器,即充电机不必再加装笨重、昂贵的输出电流传感器,实现了无输出电流传感器下的输出电流控制,降低了充电机的重量和成本。本技术同样可以采样变压器副边或者副边滤波电抗器的电流以等效计算出输出电流,以实现等效控制。
[0088]
实施例
[0089]
在一台充电机产品上进行了该方法的实施验证。充电机参数如下:
[0090][0091]
基于ccs5.3软件平台用c++语言编写移相全桥电路控制程序。程序的主要内容包括:移相控制驱动脉冲的生成,系统模拟量、数字量的采集,利用所采集的模拟量与数字量做过流、过压、过温保护以及双闭环串级控制器的设计等工作。
[0092]
通过fpga芯片采样经外部地址总线将原边电流值传给dsp主控芯片,dsp主控芯片对一个开关周期内所收到的原边电流采样点进行有效值计算,开关频率为10khz,一个开关周期对20个采样点进行有效值计算,如图3所示。
[0093]
有效值计算公式如下:
[0094][0095]
通过求出的原边电流有效值i
prms
并根据前章节所求出的与输出电流的线性关系对输出总电流进行控制。
[0096]
双闭环串级控制系统的结构框图如图4所示。
[0097]
在实际设计中采用了电压外环和电流内环的串级调节控制。加入电流内环可使系统的动态响应加快,串级调节使整个系统的负载响应特性有了显著的提高。其中电压外环采用pid调节器,电感电流内环采用pi调节器。增量式pid算法公式如下所示:
[0098]
δuk=u
k-u
k-1
=k
p
(e
k-e
k-1
)+k
iek
+kd(e
k-2e
k-1
+e
k-2
)
[0099]
=d0ek+d1e
k-1
+d2e
k-2
[0100]
式中:d0=k
p
+ki+kd,d1=-(k
p
+2kd),d2=kd,δuk为控制对象增量,uk为本控制周期控制对象值,u
k-1
为上个控制周期控制对象值,k
p
为比例系数,ki为积分系数,kd为微分系数,ek为本控制周期误差值,e
k-1
为上个控制周期误差值,e
k-2
为上上个控制周期误差值,当k=1时,e
k-1
和e
k-2
设置为0。
[0101]
从图6的试验结果看,该控制方法可以很好的实现输出电流的等效控制。
[0102]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1