一种无轴承开关磁阻电机设计方法及电机结构
1.本发明涉及一种无轴承开关磁阻电机设计方法及电机结构,属于电机结构设计技术领域。
背景技术:
2.在高速电机应用领域,磁悬浮技术可以替代传统机械轴承支撑开关磁阻电机转子,提升电机运行性能,保证转子悬浮运行,减少摩擦和磨损,提高系统使用寿命。传统磁悬浮开关磁阻电机中添加的磁悬浮轴承额外增加了转子的轴向长度,降低了系统的临界转速,对电机系统的空间利用率较低。为提高磁悬浮开关磁阻电机集成度,实现更稳定的支撑,无轴承开关磁阻电机被提出来,在该系统中,既能实现旋转,又能实现悬浮。但同时也带来了问题,转矩与悬浮同时工作会带来耦合问题,并且悬浮的引入会降低输出转矩。为了实现悬浮与转矩解耦、提高输出转矩,需要提出一种新的无轴承开关磁阻电机(bsrm)设计方案。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种无轴承开关磁阻电机设计方法及电机结构,实现了电机悬浮与转矩解耦,同时提高了输出转矩。
4.本发明为解决上述技术问题采用以下技术方案:
5.一种无轴承开关磁阻电机设计方法,所述方法包括如下步骤:
6.步骤1,构造无轴承开关磁阻电机的电感曲线;
7.步骤2,确定电机相邻两相之间的间距,并构建间距与定子齿极宽度、转子齿极宽度之间的关系;
8.步骤3,根据步骤1、步骤2、极弧系数约束条件以及已知的定子极弧系数、齿极宽度和极数关系式,转子极弧系数、齿极宽度和极数关系式,定子极距和极数关系式,转子极距和极数关系式,得到无轴承开关磁阻电机定、转子各自对应的齿极、极距和极弧系数。
9.作为本发明的一种优选方案,所述步骤1的具体过程如下:
10.定义转子位置从第一状态到第五状态为一个电周期,第一状态为一个电周期的初始位置,第五状态为一个电周期的结束位置,同时第五状态为下一个电周期的初始位置;
11.当转子位置从第一状态变为第二状态时,转子旋转角度为θ
12
,该过程中电感曲线从最小值呈线性上升直至最大值,即电感曲线处于上升区,为无轴承开关磁阻电机提供转矩;当转子位置从第二状态变为第三状态时,转子旋转角度为θ
23
,该过程中电感曲线一直恒定为最大值,即电感曲线属于上平顶区,为无轴承开关磁阻电机提供悬浮力;当转子位置从第三状态变为第四状态时,转子旋转角度为θ
34
,该过程中电感曲线从最大值呈线性下降直至最小值,即电感曲线处于下降区;当转子位置从第四状态变为第五状态时,转子旋转角度为θ
45
,该过程中电感曲线一直恒定为最小值,即电感曲线属于下平顶区;
12.情况1:当转子极数nr大于定子极数ns时,转子旋转角度与电子定、转子的结构参数
之间存在如下关系:
13.θ
12
=br14.θ
23
=b
s-br15.θ
34
=br16.θ
45
=(1-as)
·
t
ps-br17.情况2:当转子极数nr小于定子极数ns时,转子旋转角度与电子定、转子的结构参数之间存在如下关系:
18.θ
12
=bs19.θ
23
=b
r-bs20.θ
34
=bs21.θ
45
=(1-ar)
·
t
pr-bs22.其中,bs、br分别表示定子齿极宽度、转子齿极宽度,t
ps
、t
pr
分别表示定子极距、转子极距,as、ar分别表示定子极弧系数、转子极弧系数。
23.作为本发明的一种优选方案,所述步骤2的具体过程如下:
24.情况1:当转子极数nr大于定子极数ns时,相邻两相之间的间距θ
phase
为:
[0025][0026]
构建间距与定子齿极宽度、转子齿极宽度之间的关系如下,实现相邻两相悬浮力无缝衔接:
[0027][0028]
情况2:当转子极数nr小于定子极数ns时,相邻两相之间的间距θ
phase
为:
[0029][0030]
构建间距与定子齿极宽度、转子齿极宽度之间的关系如下,实现相邻两相悬浮力无缝衔接:
[0031][0032]
其中,m表示电机相数。
[0033]
作为本发明的一种优选方案,所述步骤3中,极弧系数约束条件为:定子极弧系数小于或等于0.8,转子极弧系数小于或等于0.8。
[0034]
作为本发明的一种优选方案,所述步骤3中,已知的定子极弧系数、齿极宽度和极数关系式,转子极弧系数、齿极宽度和极数关系式,定子极距和极数关系式,转子极距和极数关系式,分别为:
[0035][0036]
其中,bs、br分别表示定子齿极宽度、转子齿极宽度,t
ps
、t
pr
分别表示定子极距、转子极距,as、ar分别表示定子极弧系数、转子极弧系数,ns、nr分别表示定子极数、转子极数。
[0037]
一种使用所述无轴承开关磁阻电机设计方法的电机结构,包括定子和转子,且:
[0038]
当转子极数大于定子极数时,无轴承开关磁阻电机为五相电机、六相电机或七相
电机;
[0039]
五相电机的电机结构为10/12极,定子极距t
ps
=36
°
,转子极距t
pr
=30
°
,定子极弧系数as=0.6,转子极弧系数ar=0.32;
[0040]
六相电机的电机结构为12/10极,定子极距t
ps
=30
°
,转子极距t
pr
=36
°
,定子极弧系数as=0.35,转子极弧系数ar=0.62;
[0041]
七相电机的电机结构为12/14极,定子极距t
ps
=30
°
,转子极距t
pr
=25.714
°
,定子极弧系数as=0.54,转子极弧系数ar=0.3;
[0042]
当转子极数小于定子极数时,无轴承开关磁阻电机为两相电机、三相电机、四相电机或五相电机;
[0043]
两相电机的电机结构为6/3极、8/4极或12/6极;当电机结构为6/3极,定子极距t
ps
=60
°
,转子极距t
pr
=120
°
,定子极弧系数as=0.4,转子极弧系数ar=0.7;当电机结构为8/4极,定子极距t
ps
=45
°
,转子极距t
pr
=90
°
,定子极弧系数as=0.4,转子极弧系数ar=0.7;当电机结构为12/6极,定子极距t
ps
=30
°
,转子极距t
pr
=60
°
,定子极弧系数as=0.4,转子极弧系数ar=0.7;
[0044]
三相电机的电机结构为9/3极、12/4极、9/6极或12/8极;当电机结构为9/3极,定子极距t
ps
=40
°
,转子极距t
pr
=120
°
,定子极弧系数as=0.8,转子极弧系数ar=0.6;当电机结构为12/4极,定子极距t
ps
=30
°
,转子极距t
pr
=90
°
,定子极弧系数as=0.8,转子极弧系数ar=0.6;当电机结构为9/6极,定子极距t
ps
=40
°
,转子极距t
pr
=60
°
,定子极弧系数as=0.4,转子极弧系数ar=0.6;当电机结构为12/8极,定子极距t
ps
=30
°
,转子极距t
pr
=45
°
,定子极弧系数as=0.4,转子极弧系数ar=0.6;
[0045]
四相电机的电机结构为12/3极、6/4极或8/6极;当电机结构为12/3极,定子极距t
ps
=30
°
,转子极距t
pr
=120
°
,定子极弧系数as=0.8,转子极弧系数ar=0.45;当电机结构为6/4极,定子极距t
ps
=60
°
,转子极距t
pr
=90
°
,定子极弧系数as=0.2,转子极弧系数ar=0.8;当电机结构为8/6极,定子极距t
ps
=45
°
,转子极距t
pr
=60
°
,定子极弧系数as=0.3,转子极弧系数ar=0.72;
[0046]
五相电机的电机结构为10/4极、10/6极或10/8极;当电机结构为10/4极,定子极距t
ps
=36
°
,转子极距t
pr
=90
°
,定子极弧系数as=0.5,转子极弧系数ar=0.6;当电机结构为10/6极,定子极距t
ps
=36
°
,转子极距t
pr
=60
°
,定子极弧系数as=0.4,转子极弧系数ar=0.64;当电机结构为10/8极,定子极距t
ps
=36
°
,转子极距t
pr
=45
°
,定子极弧系数as=0.35,转子极弧系数ar=0.68。
[0047]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0048]
1、本发明根据实现悬浮与转矩解耦和提高输出转矩为目标,构造无轴承开关磁阻电机的电感曲线,根据电感曲线获得电机定、转子齿极尺寸关系,从而得到定、转子齿极和极弧系数关系式,基于极弧系数约束条件,得到无轴承开关磁阻电机定、转子各自对应的齿极宽度、极距和极弧。
[0049]
2、本发明设计方法实现了无轴承开关磁阻电机悬浮与转矩解耦,同时提高了输出转矩。
附图说明
[0050]
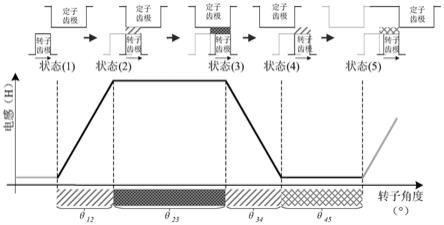
图1是本发明bsrm电感曲线及定转子齿极关系图。
[0051]
图2是本发明12/4极bsrm电机尺寸标注图,其中(a)为12/4bsrm定子结构,(b)为12/4bsrm转子结构。
[0052]
图3是本发明bsrm相邻两相电感曲线与定、转子齿极关系图。
[0053]
图4是10/12bsrm示意图。
[0054]
图5是12/10bsrm示意图。
[0055]
图6是12/14bsrm示意图。
[0056]
图7是6/3bsrm示意图。
[0057]
图8是8/4bsrm示意图。
[0058]
图9是12/6bsrm示意图。
[0059]
图10是9/3bsrm示意图。
[0060]
图11是12/4bsrm示意图。
[0061]
图12是9/6bsrm示意图。
[0062]
图13是12/8bsrm示意图。
[0063]
图14是12/3bsrm示意图。
[0064]
图15是6/4bsrm示意图。
[0065]
图16是8/6bsrm示意图。
[0066]
图17是10/4bsrm示意图。
[0067]
图18是10/6bsrm示意图。
[0068]
图19是10/8bsrm示意图。
具体实施方式
[0069]
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
[0070]
本发明提出了一种无轴承开关磁阻电机设计方法,根据实现悬浮与转矩解耦和提高输出转矩这两个目标,设计无轴承开关磁阻电机(bearingless switched reluctance motor,bsrm)的电感曲线。
[0071]
如图1所示,根据无轴承开关磁阻电机运动过程,电感值会随着转子齿极位置的变化而变化,电感值也相应产生变化。当转子位置从状态(1)变为状态(2)时,转子旋转角度为θ
12
,该过程中的电感呈直线上升趋势;当转子位置从状态(2)变为状态(3)时,转子旋转角度为θ
23
,该过程中的电感值一直保持为恒定最大值;当转子位置从状态(3)变为状态(4)时,转子旋转角度为θ
34
,该过程中的电感值呈线性下降趋势;当转子位置从状态(4)变为状态(5)时,转子旋转角度为θ
45
,该过程中的电感值一直保持为恒定最小值;电机旋转为周期性运动,从状态(1)到状态(5)为一个电周期。
[0072]
根据定、转子齿极数的不同,又可以细分两种情况,即:转子极数》定子极数,以及转子极数《定子极数。首先,需要定义bsrm的结构参数,如表1所示。以12/4bsrm为例,相关结构参数如图2的(a)、(b)所示,其中(a)为12/4bsrm定子结构,(b)为12/4bsrm转子结构,其他
拓扑结构以此类推。
[0073]
表1 bsrm参数
[0074][0075][0076]
其中,定、转子齿极宽度以及极距可由如下公式表示。
[0077][0078]
情况1:当转子极数大于定子极数(nr》ns)时,
[0079]
在电感上升区内,转子旋转角度θ
12
与定、转子结构参数之间的关系为:
[0080]
θ
12
=br[0081]
在电感上平顶区内,转子旋转角度θ
23
与定、转子结构参数之间的关系为:
[0082]
θ
23
=b
s-br[0083]
在电感下降区内,转子旋转角度θ
34
与定、转子结构参数之间的关系为:
[0084]
θ
34
=br[0085]
在电感下平顶区内,转子旋转角度θ
45
与定、转子结构参数之间的关系为:
[0086]
θ
45
=(1-as)
·
t
ps-br[0087]
情况2:当转子极数小于定子极数(nr《ns)时,
[0088]
在电感上升区内,转子旋转角度θ
12
与定、转子结构参数之间的关系为:
[0089]
θ
12
=bs[0090]
在电感上平顶区内,转子旋转角度θ
23
与定、转子结构参数之间的关系为:
[0091]
θ
23
=b
r-bs[0092]
在电感下降区内,转子旋转角度θ
34
与定、转子结构参数之间的关系为:
[0093]
θ
34
=bs[0094]
在电感下平顶区内,转子旋转角度θ
45
与定、转子结构参数之间的关系为:
[0095]
θ
45
=(1-ar)
·
t
pr-bs[0096]
其次,确定电机相邻两相之间的间距,并构建间距与定子齿极宽度、转子齿极宽度
之间的关系。如图3所示,同样分为两种情况:
[0097]
情况1:当转子极数大于定子极数(nr》ns)时,
[0098]
相邻两相之间的间距为:
[0099][0100]
为了实现相邻两相悬浮力无缝衔接,保证周期内可连续产生稳定悬浮力,构建定子齿极宽度、转子齿极宽度与θ
phase
之间的关系:
[0101][0102]
情况2:当转子极数小于定子极数(nr《ns)时,
[0103]
相邻两相之间的间距为:
[0104][0105]
为了实现相邻两相悬浮力无缝衔接,保证周期内可连续产生稳定悬浮力,构建定子齿极宽度、转子齿极宽度与θ
phase
之间的关系:
[0106][0107]
电感曲线处于上升区时,为无轴承开关磁阻电机提供转矩,电感曲线处于上平顶区时,为无轴承开关磁阻电机提供悬浮力。
[0108]
最后,根据极弧系数约束条件以及已知的定子极弧系数、齿极宽度和极数关系式,转子极弧系数、齿极宽度和极数关系式,定子极距和极数关系式,转子极距和极数关系式,得到无轴承开关磁阻电机定、转子各自对应的齿极、极距和极弧系数。
[0109]
极弧系数约束条件:定子极弧系数和转子极弧系数均小于或等于0.8。
[0110]
使用上述无轴承开关磁阻电机设计方法设计得到的电机结构具体如下:
[0111]
情况1:当转子极数大于定子极数(nr》ns)时,无轴承开关磁阻电机为五相电机、六相电机或七相电机;
[0112]
如图4所示,五相电机的电机结构为10/12极,定子极距t
ps
=36
°
,转子极距t
pr
=30
°
,定子极弧系数as=0.6,转子极弧系数ar=0.32;
[0113]
如图5所示,六相电机的电机结构为12/10极,定子极距t
ps
=30
°
,转子极距t
pr
=36
°
,定子极弧系数as=0.35,转子极弧系数ar=0.62;
[0114]
如图6所示,七相电机的电机结构为12/14极,定子极距t
ps
=30
°
,转子极距t
pr
=25.714
°
,定子极弧系数as=0.54,转子极弧系数ar=0.3;
[0115]
情况2:当转子极数小于定子极数(nr《ns)时,无轴承开关磁阻电机为两相电机、三相电机、四相电机或五相电机;
[0116]
两相电机的电机结构为6/3极、8/4极或12/6极;
[0117]
如图7所示,当电机结构为6/3极,定子极距t
ps
=60
°
,转子极距t
pr
=120
°
,定子极弧系数as=0.4,转子极弧系数ar=0.7;
[0118]
如图8所示,当电机结构为8/4极,定子极距t
ps
=45
°
,转子极距t
pr
=90
°
,定子极弧系数as=0.4,转子极弧系数ar=0.7;
[0119]
如图9所示,当电机结构为12/6极,定子极距t
ps
=30
°
,转子极距t
pr
=60
°
,定子极
弧系数as=0.4,转子极弧系数ar=0.7;
[0120]
三相电机的电机结构为9/3极、12/4极、9/6极或12/8极;
[0121]
如图10所示,当电机结构为9/3极,定子极距t
ps
=40
°
,转子极距t
pr
=120
°
,定子极弧系数as=0.8,转子极弧系数ar=0.6;
[0122]
如图11所示,当电机结构为12/4极,定子极距t
ps
=30
°
,转子极距t
pr
=90
°
,定子极弧系数as=0.8,转子极弧系数ar=0.6;
[0123]
如图12所示,当电机结构为9/6极,定子极距t
ps
=40
°
,转子极距t
pr
=60
°
,定子极弧系数as=0.4,转子极弧系数ar=0.6;
[0124]
如图13所示,当电机结构为12/8极,定子极距t
ps
=30
°
,转子极距t
pr
=45
°
,定子极弧系数as=0.4,转子极弧系数ar=0.6;
[0125]
四相电机的电机结构为12/3极、6/4极或8/6极;
[0126]
如图14所示,当电机结构为12/3极,定子极距t
ps
=30
°
,转子极距t
pr
=120
°
,定子极弧系数as=0.8,转子极弧系数ar=0.45;
[0127]
如图15所示,当电机结构为6/4极,定子极距t
ps
=60
°
,转子极距t
pr
=90
°
,定子极弧系数as=0.2,转子极弧系数ar=0.8;
[0128]
如图16所示,当电机结构为8/6极,定子极距t
ps
=45
°
,转子极距t
pr
=60
°
,定子极弧系数as=0.3,转子极弧系数ar=0.72;
[0129]
五相电机的电机结构为10/4极、10/6极或10/8极;
[0130]
如图17所示,当电机结构为10/4极,定子极距t
ps
=36
°
,转子极距t
pr
=90
°
,定子极弧系数as=0.5,转子极弧系数ar=0.6;
[0131]
如图18所示,当电机结构为10/6极,定子极距t
ps
=36
°
,转子极距t
pr
=60
°
,定子极弧系数as=0.4,转子极弧系数ar=0.64;
[0132]
如图19所示,当电机结构为10/8极,定子极距t
ps
=36
°
,转子极距t
pr
=45
°
,定子极弧系数as=0.35,转子极弧系数ar=0.68。
[0133]
使用本发明公开的无轴承开关磁阻电机设计方法设计得到的电机结构,其极弧系数可以有很多方案,这里不一一列举,上述实施例给出的极弧系数值是其中的最优方案。本领域技术人员在不背离本发明的技术思想和保护范围的情况下做出的其他的变化和修改,仍包括在本发明保护范围内。
[0134]
以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1