一种导线修补机械臂的制作方法
1.本发明涉及导线修补技术领域,具体涉及一种导线修补机械臂。
背景技术:
2.输电线路是电网的重要组成部分,长期运行于露天环境,受复杂气候、内部应力、腐蚀、雷击、外力破坏等因素影响,容易出现导线裂纹、铝线断股及散开等现象。致使输电导线载流能力降低、断股位置局部发热严重和线路间安全距离变短,影响线路安全运行。重则甚至引发输电线路相间短路、闪络等严重事故,所以必须进行修补,及时消除安全隐患。
3.传统人工修补方法需攀爬杆塔并在高空、强电磁场环境中作业,且多是处于断电状态,即使带电检修,也必须身穿绝缘服,存在劳动强度大、危险性高和效率低等不足。
技术实现要素:
4.本发明的目的在于克服上述技术不足,提供一种导线修补机械臂,解决现有技术中采用人工修补方法劳动强度大、危险性高、效率低的技术问题。
5.为达到上述技术目的,本发明采取了以下技术方案:
6.一种导线修补机械臂,包括旋转伸缩机构、导向座、捋线机构以及导线修补机构,其中,所述旋转伸缩机构与所述导向座固定连接,所述捋线机构以及所述导线修补机构设置于所述导向座上,
7.所述旋转伸缩机构用于带动所述导向座进行竖直和水平方向上的旋转以及竖直方向上的轴向移动、以使所述捋线机构以及所述导线修补机构跟随运动;
8.所述捋线机构用于将分叉的导线夹紧并捋直;
9.所述导线修补机构用于夹紧导线并对所述导线进行包裹修补。
10.优选的,所述的导线修补机械臂中,所述旋转伸缩机构包括竖直旋转组件、竖直伸缩组件以及水平旋转组件,所述竖直旋转组件与所述竖直伸缩组件固定连接、并用于带动所述竖直伸缩组件进行竖直方向上的旋转运动,所述竖直伸缩组件还与所述水平旋转组件固定连接、并用于带动所述水平旋转组件进行竖直方向上的直线运动,所述水平旋转组件与所述导向座固定连接、并用于带动所述导向座进行水平方向上的旋转运动。
11.优选的,所述的导线修补机械臂中,所述竖直旋转组件包括第一驱动件、第一蜗杆以及第一蜗轮,所述第一驱动件的输出端与所述第一蜗杆传动连接、并用于带动所述第一蜗杆转动,所述第一蜗杆与所述第一蜗轮啮合、并用于带动所述第一蜗轮在竖直方向上转动,所述第一蜗轮的中心与所述竖直伸缩组件固定连接。
12.优选的,所述的导线修补机械臂中,所述竖直伸缩组件包括第二驱动件、导轨以及第一滑块,所述导轨与所述第一蜗轮的中心固定连接,所述滑块与所述导轨滑动连接,所述第二驱动件与所述第一滑块传动连接、并用于带动所述第一滑块在所述导轨上进行竖直方向上的滑动,所述滑块与所述水平旋转组件滑动连接。
13.优选的,所述的导线修补机械臂中,所述水平旋转组件包括第三驱动件、第二蜗杆
以及第二蜗轮,所述第三驱动件固定安装与所述滑块上,所述第三驱动件的输出端与所述第二蜗杆传动连接、并用于带动所述第二蜗杆转动,所述第二蜗杆与所述第二蜗轮啮合、并用于带动所述第二蜗轮在水平方向上转动,所述第二蜗轮的中心与所述导线修补机构固定连接。
14.优选的,所述的导线修补机械臂中,所述捋线机构包括安装座、滑块传动机构、第二滑块以及夹爪机构,所述安装座与所述导向座可拆卸连接,所述第二滑块与所述安装座滑动连接,所述滑块传动机构可拆卸设置于所述安装座上并与所述第二滑块传动连接、以带动所述第二滑块相对于所述安装座滑动,所述夹爪机构与所述第二滑块可拆卸连接、并用于夹紧或松开分叉的导线。
15.优选的,所述的导线修补机械臂中,所述滑块传动机构包括丝杆和丝杆传动组件,所述丝杆传动组件可拆卸设置于所述安装座上、并与所述丝杆固定连接,所述丝杆传动组件用于带动所述丝杆转动,所述丝杆与所述第二滑块螺纹连接。
16.优选的,所述的导线修补机械臂中,所述夹爪机构包括左夹爪、右夹爪、左夹爪驱动组件以及右夹爪驱动组件,所述左夹爪和右夹爪相对设置,所述左夹爪驱动组件以及右夹爪驱动组件均可拆卸设置于所述第二滑块上,所述左夹爪驱动组件与所述左夹爪固定连接、并可带动所述左夹爪转动,所述右夹爪驱动组件与所述右夹爪固定连接、并可带动所述右夹爪转动,所述左夹爪以及所述右夹爪在转动时可靠近或远离,当所述左夹爪和所述右夹爪靠近时,可夹紧所述导线。
17.优选的,所述的导线修补机械臂中,所述导线修补机构包括左旋转机构、右旋转机构、左夹块、右夹块以及正反牙丝杆,所述左夹块以及所述右夹块均与所述导向座滑动连接、并可与所述导向座分离,所述左夹块以及所述右夹块分别与所述正反牙丝杆的正螺纹牙以及反螺纹牙螺纹连接,所述左旋转机构和右旋转机构均与所述导向座滑动连接,所述左旋转机构和右旋转机构分别用于与所述正反牙丝杆的两端传动连接,以使所述左夹块和所述右夹块靠近或远离,当所述左夹块和所述右夹块靠近时,可夹紧并包裹所述导线。
18.优选的,所述的导线修补机械臂中,所述左夹块上形成有若干个凸起,所述右夹块上形成有若干个与所述凸起配合的凹槽。
19.与现有技术相比,本发明提供的导线修补机械臂,通过设置旋转伸缩机构,可以利用旋转伸缩机构带动导向座及导向座上的捋线机构和导线修补机构进行三个方向的自由运动,从而方便根据不同倾斜角度的断股情况调整机械臂的修补姿态,通过设置捋线机构,可以对分叉的导线进行捋直修复,然后利用导线修补机构对捋直后的断股导线进行包裹修补,完全模拟了人工修补的过程,降低了劳动强度,也避免了采用人工修补方法危险性高、效率低的技术问题。
附图说明
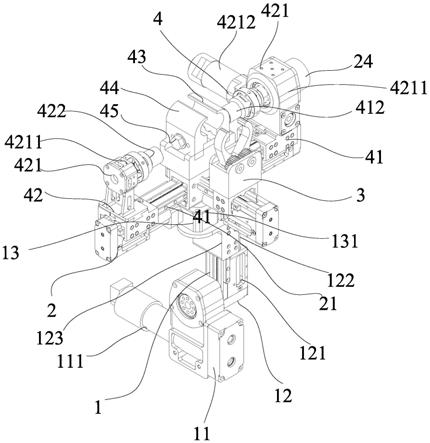
20.图1是本发明提供的导线修补机械臂的一较佳实施例的示意图;
21.图2是本发明提供的导线修补机械臂中,所述旋转伸缩机构的一较佳实施例的示意图;
22.图3是本发明提供的导线修补机械臂中,所述旋转伸缩机构的所述第一传动机构的一较佳实施例的示意图;
23.图4是本发明提供的导线修补机械臂中,所述旋转伸缩机构中的所述第二传动机构的一较佳实施例的示意图;
24.图5是本发明提供的导线修补机械臂中,所述捋线机构的一较佳实施例的示意图;
25.图6是本发明提供的导线修补机械臂中,所述捋线机构的滑块传动机构的一较佳实施例的示意图;
26.图7是本发明提供的导线修补机械臂中,导线修补机构的所述第一驱动组件以及第二驱动组件的一较佳实施例的示意图;
27.图8是本发明提供的导线修补机械臂中,导线修补机构的所述第三驱动组件的一较佳实施例的示意图;
28.图9是本发明提供的导线修补机械臂中,导线修补机构的所述自锁机构的一较佳实施例的示意图。
具体实施方式
29.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
30.请参阅图1,本发明实施例提供的导线修补机械臂,包括旋转伸缩机构 1、导向座2、捋线机构3以及导线修补机构4,其中,所述旋转伸缩机构1 与所述导向座2固定连接,所述捋线机构3以及所述导线修补机构4设置于所述导向座2上。
31.其中,所述旋转伸缩机构1用于带动所述导向座2进行竖直和水平方向上的旋转以及竖直方向上的轴向移动、以使所述捋线机构3以及所述导线修补机构4跟随运动。
32.所述捋线机构3用于将分叉的导线夹紧并捋直。
33.所述导线修补机构4用于夹紧导线并对所述导线进行包裹修补。
34.本实施例中,通过设置旋转伸缩机构1,可以利用旋转伸缩机构1带动导向座2及导向座2上的捋线机构3和导线修补机构4进行三个方向的自由运动,从而方便根据不同倾斜角度的断股情况调整机械臂的修补姿态,通过设置捋线机构3,可以对分叉的导线进行捋直修复,然后利用导线修补机构4对捋直后的断股导线进行包裹修补,完全模拟了人工修补的过程,降低了劳动强度,也避免了采用人工修补方法危险性高、效率低的技术问题。
35.在一个优选的实施例中,请参阅图1和图2,所述旋转伸缩机构1包括竖直旋转组件11、竖直伸缩组件12以及水平旋转组件13,所述竖直旋转组件11与所述竖直伸缩组件12固定连接、并用于带动所述竖直伸缩组件 12进行竖直方向上的旋转运动,所述竖直伸缩组件12还与所述水平旋转组件13固定连接、并用于带动所述水平旋转组件13进行竖直方向上的直线运动,所述水平旋转组件13与所述导向座2固定连接、并用于带动所述导向座2进行水平方向上的旋转运动。
36.本实施例中,通过设置竖直旋转组件11可以实现机械臂在竖直方向上的转动,通过设置竖直伸缩组件12,可以实现机械臂在竖直方向上的直线运动,通过设置水平旋转组件13,可以实现机械臂在水平方向上的转动,从而实现了导向座2及其连接捋线机构3和导线修补机构4在三个方向上的自由度的移动,使得机械臂可以根据使用场景自由调节姿态,方便使用,提高工作效率。
37.在一个优选的实施例中,请参阅图2,所述竖直旋转组件11包括第一驱动件111以及第一传动机构112,所述第一驱动件111的输出端与所述第一传动机构112传动连接、并用于带动所述第一传动机构112在竖直方向上转动,所述第一传动机构112与所述竖直伸缩组件2固定连接。
38.本实施例中,所述第一驱动件111动作,带动所述第一传动机构112 在竖直方向上转动,所述第一传动机构112在动作时,带动与其固定连接的竖直伸缩组件12在竖直方向上转动,进而实现了整个机械臂在竖直方向上的姿态调整。
39.请参阅图3,在一个优选的实施例中,所述第一传动机构112包括第一蜗杆1121以及第一蜗轮1122,所述第一驱动件111的输出端与所述第一蜗杆1121传动连接、并用于带动所述第一蜗杆1121转动,所述第一蜗杆1121 与所述第一蜗轮1122啮合、并用于带动所述第一蜗轮1122在竖直方向上转动,所述第一蜗轮1122的中心与所述竖直伸缩组件12固定连接。
40.本实施例中,通过蜗轮蜗杆机构实现了动力的传动,第一驱动件11先带动第一蜗杆1121动作,第一蜗杆1121在转动时,带动与其啮合的第一蜗轮1122转动,进而使所述第一蜗轮1122固定连接的竖直伸缩组件12跟随转动,从而实现了导向座2在竖直方向上的姿态调整,而且通过蜗轮蜗杆机构可以实现大扭矩输出,并且还具有自锁功能,使其不需要维持机械臂姿态,而长时间超负荷运行,从而保护第一驱动件11的驱动。
41.优选的,所述第一驱动件111为电机,方便进行安装。
42.在一个优选的实施例中,所述竖直伸缩组件12包括第二驱动件121、导轨122以及第一滑块123,所述第二驱动件121与所述第一蜗轮1122的中心固定连接,所述导轨122固定设置于所述第二驱动件121上,所述第一滑块123与所述导轨122滑动连接,所述第二驱动件121与所述第一滑块123传动连接、并用于带动所述第一滑块123在所述导轨22上进行竖直方向上的滑动,所述第一滑块123与所述水平旋转组件13固定连接。
43.本实施例中,第二驱动件121动作,带动所述第一滑块123在所述导轨122上滑动,从而实现水平旋转组件13的上下滑动,可使安装于所述水平旋转组件13的导向座2进行竖直方向上的轴向位移。
44.优选的,所述第二驱动件121包括伸缩气缸及气缸安装座,所述伸缩气缸以及所述导轨122均固定安装在所述气缸安装座上,所述气缸安装座与所述第一蜗轮1122的中心固定连接,本实施例中,通过气缸带动第一滑块123移动,驱动力大,而且安装方便。
45.在一个优选的实施例中,请参阅图4,所述水平旋转组件13包括第三驱动件131以及第二传动机构132,所述第三驱动件131固定安装于所述第一滑块123上,所述第三驱动件131的输出端与所述第二传动机构132传动连接、并用于带动所述第二传动机构132在水平方向上转动。
46.本实施例中,所述第三驱动件131动作,带动所述第二传动机构132 在水平方向上转动,所述第二传动机构132在动作时,带动与其固定连接的导向座2在水平方向上转动,进而实现了整个机械臂在水平方向上的位姿调整。
47.请参阅图4,优选的,所述第二传动机构132包括第二蜗杆1321以及第二蜗轮1322,所述第三驱动件131的输出端与所述第二蜗杆1321传动连接、并用于带动所述第二蜗杆1321转动,所述第二蜗杆1321与所述第二蜗轮1322啮合、并用于带动所述第二蜗轮1322在
水平方向上转动。
48.本实施例中,通过蜗轮蜗杆机构实现了动力的传动,第二驱动件121 先带动第二蜗杆1321动作,第二蜗杆1321在转动时,带动与其啮合的第二蜗轮1322转动,进而使所述第二蜗轮1322固定连接的修复末端跟随转动,从而实现了机械臂在水平方向上的姿态调整,而且通过蜗轮蜗杆机构可以实现大扭矩输出,并且还具有自锁功能,使其不需要维持机械臂姿态,而长时间超负荷运行,从而保护第二驱动件的驱动。
49.优选的,所述第三驱动件131为电机,方便进行安装。
50.请参阅图1和图5,在一个优选的实施例中,所述捋线机构3包括安装座31、滑块传动机构32、第二滑块33以及夹爪机构34,所述安装座31与所述导向座2可拆卸连接,所述第二滑块33与所述安装座31滑动连接,所述滑块传动机构32可拆卸设置于所述安装座31上并与所述第二滑块33 传动连接、以带动所述第二滑块33相对于所述安装座31滑动,所述夹爪机构34与所述第二滑块33可拆卸连接、并用于夹紧或松开分叉的导线。
51.本实施例中,通过设置夹爪机构34可以在对分叉导线捋直时先夹紧分叉的导线,然后通过滑块传动机构32带动所述第二滑块33进行移动,从而使第二滑块33相对于所述安装座31来回滑动,在第二滑块33来回滑动的过程中,带动夹紧分叉导线的夹爪机构34进行来回移动,进而可以实现对分叉导线的捋直工作,无需人工进行操作,避免了采用人工修复铝线分叉时劳动强度大、危险性高和效率低的问题。
52.在一个优选的实施例中,所述滑块传动机构32包括丝杆321和丝杆传动组件322,所述丝杆传动组件322可拆卸设置于所述安装座31上、并与所述丝杆321固定连接,所述丝杆传动组件322用于带动所述丝杆321转动,所述丝杆321与所述第二滑块33螺纹连接。
53.本实施例中,通过丝杆滑块机构来驱动所述第二滑动33滑动,当所述丝杆传动组件322动作时,可带动所述丝杆321转动,当丝杆321转动时,与其螺纹连接的第二滑块33将丝杆的转动运动转化为第二滑块33的滑动运动,从而实现了所述第二滑块33在所述安装座31上的滑动,丝杆321 的正反转可以实现第二滑块33的来回运动。
54.在一个优选的实施例中,请参阅图5和图6,所述丝杆传动组件322包括第四驱动件、第一传动件3221和第二传动件3222,所述第四驱动件与所述第一传动件3221传动连接、并可带动所述第一传动件3221转动,所述第一传动件221与所述第二传动件222传动连接、并可带动所述第二传动件222转动,所述第二传动件222的转动中心与所述丝杆21固定连接。
55.本实施例中,所述第四驱动件为电机,所述第一传动件3221和所述第二传动件3222均为齿轮,所述第一传动件3221与所述第二传动件3222啮合,当所述电机动作时,可以带动与连接的齿轮转动,当此齿轮转动时,可带动与其啮合的另一个齿轮转动,另一个齿轮转动时可带动与其固定连接的丝杆321转动,丝杆321的转动运动即可转化为所述第二滑块33的滑动运动。
56.在一个优选的实施例中,请参阅图5,所述夹爪机构34包括左夹爪341、右夹爪342、左夹爪驱动组件343以及右夹爪驱动组件344,所述左夹爪341 和右夹爪342相对设置,所述左夹爪驱动组件343以及右夹爪驱动组件344 均可拆卸设置于所述第二滑块33上,所述左夹爪驱动组件343与所述左夹爪341固定连接、并可带动所述左夹爪341转动,所述右夹爪驱动组件344 与所述右夹爪342固定连接、并可带动所述右夹爪342转动,所述左夹爪 341以
及所述右夹爪342在转动时可靠近或远离,当所述左夹爪341和所述右夹爪342靠近时,可夹紧所述导线。
57.本实施例中,当需要进行分叉导线的捋直时,首先使左夹爪341和所述右夹爪342远离,从而形成一夹持空间,然后将分叉导线置于所述夹持空间内,启动左夹爪驱动组件343以及右夹爪驱动组件344,左夹爪驱动组件343以及右夹爪驱动组件344动作,分别带动所述左夹爪341和所述右夹爪342转动,从而可以使左夹爪341和所述右夹爪342靠近,并夹紧分叉导线,在第二滑块33来回运动时,夹爪即可将分叉的导线捋直。
58.在一个优选的实施例中,所述左夹爪驱动组件343包括第五驱动件以及第三传动件3431,所述第五驱动件可拆卸设置于所述第二滑块33上,所述第五驱动件与所述第三传动件3431传动连接、并可带动所述第三传动件 3431转动,所述第三传动件3431的转动中心与所述左夹爪341固定连接。本实施例中,所述第五驱动件为电机,所述第三传动件3431为齿轮,通过电机带动齿轮转动,即可实现左夹爪341的转动。
59.在一个优选的实施例中,所述右夹爪驱动组件344包括第六驱动件以及第四传动件3441,所述第六驱动件可拆卸设置于所述第二滑块33上,所述第六驱动件与所述第四传动件3441传动连接、并可带动所述第四传动件 3441转动,所述第四传动件3441的转动中心与所述右夹爪342固定连接。本实施例中,所述第六驱动件为电机,所述第四传动件3441为齿轮,通过电机带动齿轮转动,即可实现右夹爪342的转动。
60.在一个优选的实施例中,请参阅图1,所述导线修补机构4包括左旋转机构41、右旋转机构42、左夹块43、右夹块44以及正反牙丝杆45,所述左夹块以及所述右夹块42均与所述导向座2滑动连接、并可与所述导向座 2分离,所述左夹块43以及所述右夹块44分别与所述正反牙丝杆45的正螺纹牙以及反螺纹牙螺纹连接,所述左旋转机构41和右旋转机构42均与所述导向座2滑动连接,所述左旋转机构41和右旋转机构42分别用于与所述正反牙丝杆45的两端传动连接,以使所述左夹块43和所述右夹块44 靠近或远离,当所述左夹块43和所述右夹块44靠近时,可夹紧并包裹所述导线。
61.本实施例中,用于进行导线修补包裹的包裹件被分为左夹块43和右夹块44,并且与导向座2滑动连接,在使用前,首先将通过左夹块43、右夹块44以及正反牙丝杆45置于所述导向座2上,然后使左右旋转机构相对于所述导向座2滑动,使左右旋转机构顶住所述正反牙丝杆45的两端,进而可以避免左夹块43以及所述右夹块44从而导向座2中脱离,然后使待修补导线置于左夹块43和右夹块44中间件后,启动左右旋转机构,即可带动所述正反牙丝杆45转动,正反牙丝杆45转动时可以带动所左夹块43 和右夹块44靠近,即可包裹住中间的待修补导线,完成修补,然后左右旋转机构继续相对于导向座2滑动并远离两个夹块后,两个夹块没有了限制,此时只要将整个导向座2与两个夹块相对运动,即可使两个夹块与导向座2 脱离,从而完成了整个修补流程,避免了采用人工对断股导线进行夹紧加固时存在劳动强度大、危险性高和效率低的问题。
62.在一个优选的实施例中,所述左夹块43上形成有若干个凸起,所述右夹块44上形成有若干个与所述凸起配合的凹槽,使得所述左夹块43和右夹块44可以配合包裹待修补导线,所述左夹块43和所述右夹块44之间形成一容纳空间,随着所述左夹块43和右夹块44的靠近,所述容纳空间逐渐变小,从而可以使左夹块43和右夹块44紧密的包裹住到修补导线,此外,根据输电导线直径不同,所述左夹块43和右夹块44可做相应匹配更改,以适应不同电
压等级的输电线路。
63.在一个优选的实施例中,所述左夹块43和右夹块44上均形成有滑动部,所述导向座2上形成有于所述滑动部配合的滑槽,从而方便所述左夹块43和右夹块44相对于所述导向座2滑动。
64.在一个优选的实施例中,请参阅图1和图7,所述导向座2包括导向座本体21、第一丝杆22、第二丝杆23、第一驱动组件24以及第二驱动组件 25,所述导向座本体21与所述左旋转机构41和右旋转机构42均滑动连接,所述第一驱动组件24以及第二驱动组件25均可拆卸设置于所述导向座本体21上,所述第一驱动组件24与所述第一丝杆22连接、并用于驱动所述第一丝杆22转动,所述第二驱动组件25与所述第二丝杆23连接、并用于驱动所述第二丝杆24转动,所述第一丝杆22与所述左旋转机构41螺纹连接,所述第二丝杆23与所述右旋转机构42螺纹连接。
65.本实施例中,通过丝杆螺母的方式来驱动所述左右旋转机构在导向座本体21上的滑动,当所述第一驱动组件24动作时,可带动所述第一丝杆 22转动,第一丝杆22的转动可转化为所述左旋转机构41的直线运动,从而实现所述左旋转机构41的进给运动,可以顶住或松开正反牙丝杆45的一端,当所述第二驱动组件25动作时,可带动所述第二丝杆23转动,第二丝杆23的转动可转化为所述右旋转机构42的直线运动,从而实现所述右旋转机构42的进给运动,可以顶住或松开正反牙丝杆45的另一端,从而可以在进行包裹前防止左右夹块从导向座2中的滑槽脱离,包裹完成后,可松开所述正反牙丝杆45,可以方便左右夹块与导向座2脱离。
66.在一个优选的实施例中,请继续参阅图7,所述第一驱动组件24以及第二驱动组件25均包括第一驱动电机241、第一锥齿轮242和第二锥齿轮 243,所述第一驱动电机241可拆卸设置于所述导向座本体21上、并与所述第一锥齿轮242传动连接,所述第一锥齿轮242与所述第二锥齿轮243 啮合,所述第一驱动组件24的第二锥齿轮242的中心与所述第一丝杆22 固定连接,所述第二驱动组件25的第二锥齿轮242的中心与所述第二丝杆 23固定连接,所述第一驱动电机241用于带动所述第一锥齿轮242转动、以使所述第二锥齿轮243转动后,带动所述第一丝杆22或第二丝杆23转动。
67.本实施例中,当所述第一驱动电机241动作时,可带动所述第一锥齿轮242运动,第一锥齿轮242会带动与其啮合的第二锥齿轮243转动,第二锥齿轮243转动时,可带动与其固定连接的第一丝杆22或第二丝杆23 转动,第一丝杆22的转动运动会转化为所述左旋转机构41的直线运动,第二丝杆23的转动运动会转化为所述右旋转机构42的直线运动,从而实现了左旋转机构41和右旋转机构42的直线运动。
68.在一个优选的实施例中,请参阅图1和图8,所述左旋转机构41包括第三驱动组件411以及第一旋拧扳手套筒412,所述第三驱动组件411与所述导向座本体21滑动连接、并与所述第一丝杆22螺纹连接,所述第三驱动组件411还与所述第一旋拧扳手套筒412传动连接、并用于带动所述第一旋拧扳手套筒412转动,所述第一旋拧扳手套筒412的旋拧端用于与所述正反牙丝杆45的一端传动连接。
69.本实施例中,所述左旋转机构41作为主运动机构来实现左夹块43和右夹块44的直线运动,首先使左旋转机构41与正反牙丝杆45的一端接触,使所述第一旋拧扳手套筒412与所述正反牙丝杆45的一端传动连接,进而可以拧所述正反牙丝杆45,然后使所述第三驱动
组件411动作,带动所述第一旋拧扳手套筒412转动,第一旋拧扳手套筒412会带动所述正反牙丝杆45一起转动,当正反牙丝杆45转动时,会带动与其螺纹连接的左夹块 43和右夹块44进行直线运动,使左夹块43和右夹块44靠近或远离,当左夹块43和右夹块44靠近时,即可包裹待修补导线,随着正反牙丝杆45的旋转,左夹块43和右夹块44对待修补导线的包裹力越来越大,从而达到紧密包裹的目的。
70.在一个优选的实施例中,请继续参阅图8,所述第三驱动组件411包括第一安装座4111、第二驱动电机4112、第三蜗杆4113和第三蜗轮4114,所述第一安装座4111与所述第一丝杆22螺纹连接,所述第二驱动电机4112 安装于所述第一安装座4111上,所述第二驱动电机4111与所述第三蜗杆 4113传动连接、并用于带动所述第三蜗杆4113转动,所述第三蜗杆4113 与所述第三蜗轮4114啮合,所述第三蜗轮4114的中心与所述第一旋拧扳手套筒412固定连接。
71.本实施例中,当所述第二驱动电机动作时,会带动第三蜗杆4113转动,第三蜗杆4113转动时,可带动第三蜗轮4114转动,第三蜗轮4114即可带动与其固定连接的第一旋拧扳手套筒412跟随转动,从而实现对正反牙丝杆45的转动驱动动作,通过蜗轮蜗杆机构可以实现大扭矩输出,并且还具有自锁功能,使其不需要维持机械臂姿态,而长时间超负荷运行。
72.在一个优选的实施例中,请参阅图1和图9,所述右旋转机构42包括自锁机构421以及第二旋拧扳手套筒422,所述自锁机构421与所述导向座本体21滑动连接、并与所述第二丝杆23螺纹连接,所述自锁机构421还与所述第二旋拧扳手套筒422连接,所述第二旋拧扳手套筒422的旋拧端用于与所述正反牙丝杆45的一端传动连接。
73.本实施例中,所述右旋转机构42为从动机构,所述第二旋拧扳手套筒 422仅需起到顶住所述正反牙丝杆45的另一端的作用,避免在修补的过程中,其从导向座2中脱离,所述自锁机构421可保证所述第二旋拧扳手套筒32不会自主转动,从而避免左夹块43和右夹块44的位置出现偏差。
74.在一个优选的实施例中,请继续参阅图9,所述自锁机构421包括第二安装座4211、第四蜗杆4212和第四蜗轮4213,所述第二安装座4211与所述第二丝杆23螺纹连接,所述第四蜗杆4212转动安装于所述第二安装座 4211内,所述第四蜗杆4212与所述第四蜗轮4213啮合,所述第四蜗轮4213 的中心与所述第二旋拧扳手套筒422固定连接。本实施例中,所述自锁机构421没有设置驱动电机,只需起到自锁作用即可,通过蜗轮蜗杆机构的自锁能力,可以在修补的过程中,使第二旋拧扳手套筒422可以很好的将所述正反牙丝杆45的另一端保持住。当然,在其它的实施例中,所述自锁机构421亦可设置驱动电机来驱动第二旋拧扳手套筒422动作,在使用时,只需开启左旋转机构41或右旋转机构42中任意一个电机即可,本发明对此不做限定。
75.为了更好的理解本发明,以下结合图1至图对本发明的技术方案进行详细说明:
76.首先在机械臂上线前检查各结构的功能是否完好、连接是否有误,确定无误后,将机械臂通过牵引绳辅助机器人上线。机器人上线后开始向断股故障方向行驶,自动检测导线断股位置并到定位断股分叉点。定位到断股分叉点后,停止行走并锁紧本体移动机构和导线,使整个机械装置固定在导线上。完成上线、移动、固定等准备事项后,开始实现修补作业。首先调整机械臂的位置,通过竖直旋转组件11、竖直伸缩组件12以及水平旋转组件13进
行位姿调整,然后等待修补导线进入夹爪和夹块内部后,使夹爪机构34闭合,夹紧分叉导线,然后使第二滑块33来回运动,将分叉的导线捋直复位后,控制左旋转机构41、右旋转机构42动作,使左夹块43 和右夹块44夹紧并包裹断股导线,然后使左旋转机构41、右旋转机构42 与正反牙丝杆45分离,松开竖直伸缩组件12,使导向座2与所述左夹块 43和右夹块44分离,即完成了导线的修补,不需要检修人员上塔完成导线修补,在保证安全的情况下大大提高了检修人员的工作效率和缩短了工作时间。
77.综上所述,本发明提供的导线修补机械臂,通过设置旋转伸缩机构,可以利用旋转伸缩机构带动导向座及导向座上的捋线机构和导线修补机构进行三个方向的自由运动,从而方便根据不同倾斜角度的断股情况调整机械臂的修补姿态,通过设置捋线机构,可以对分叉的导线进行捋直修复,然后利用导线修补机构对捋直后的断股导线进行包裹修补,完全模拟了人工修补的过程,降低了劳动强度,也避免了采用人工修补方法危险性高、效率低的技术问题。
78.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1