飞轮永磁电机控制器及控制系统的制作方法
1.本发明涉及电气机械控制技术领域,尤其是涉及一种飞轮永磁电机控制器及控制系统。
背景技术:
2.飞轮永磁电机控制可对飞轮永磁电机的工作模式进行控制,现有技术中多采用dsp2812+fpga控制架构,dsp2812是数字型运算器,主管控制运算,fpga(field-programmable gate array,现场可编程门阵列)主管信号采集与pwm(pulse width modulation,脉冲宽度调制)输出。由于dsp2812是数字型架构,有些功能不完善,需要fpga来扩展接口,因而系统容易出现冗余,增加成本和电路板使用体积。
技术实现要素:
3.本发明的目的在于提供飞轮永磁电机控制器及控制系统,以减小电路板体积尺寸,降低系统成本。
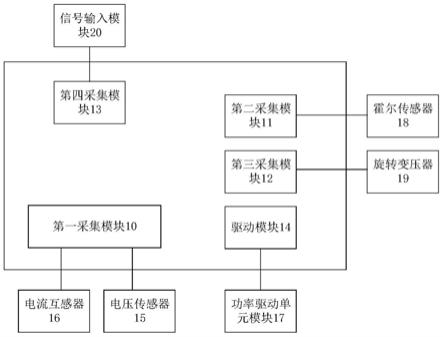
4.本发明提供的一种飞轮永磁电机控制器,包括:第一采集模块、第二采集模块、第三采集模块、第四采集模块和驱动模块;第一采集模块与外部的电压互感器及电流互感器连接;驱动模块与外部的功率驱动单元模块连接;第二采集模块与外部的霍尔传感器连接;第三采集模块与外部的旋转变压器连接;第四采集模块与外部的信号输入模块连接;第一采集模块用于采集电压互感器的电压原始信号,输出永磁电机的电压信号,采集电流互感器的电流原始信号,输出永磁电机的电流信号;第二采集模块用于采集霍尔传感器的方波信号,输出飞轮的转速信号;第三采集模块用于采集旋转变压器的信号,输出永磁电机的角度信号;第四采集模块用于采集信号输入模块发送的外部输入信号,以根据外部输入信号判断是否对飞轮永磁电机控制器进行急停控制;驱动模块用于接收目标数据,对目标数据进行变换处理,输出目标pwm信号,基于目标pwm信号控制功率驱动单元模块,以控制永磁电机的工作模式;其中,目标数据包括:电压信号、电流信号、转速信号、角度信号和外部输入信号。
5.进一步的,第一采集模块还用于:采集电压互感器的电压原始信号,对电压原始信号进行滤波、校正、补偿处理,输出永磁电机的电压信号;采集电流互感器的电流原始信号,对电流原始信号进行滤波、校正、补偿处理,输出永磁电机的电流信号。
6.进一步的,第二采集模块还用于:采集霍尔传感器的方波信号;计算单位时间内,方波信号的第一脉冲数量;根据第一脉冲数量计算飞轮的转速信号。
7.进一步的,第三采集模块还用于:采集旋转变压器的输出信号,计算单位时间内,输出信号的第二脉冲数量;根据第二脉冲数量计算永磁电机的角度信号。
8.进一步的,控制器还包括:存储模块;存储模块与外部的存储器连接;存储模块用于存储目标数据,通过i2c总线将目标数据发送给外部的存储器。
9.进一步的,驱动模块还用于:接收目标数据;对目标数据进行变换处理,得到处理
后的第一变换数据;其中,变换处理包括:park变换处理、clarke变换处理、执行pid闭环算法处理、ipark变换处理、信号处理、扇区分配处理;根据目标数据判断控制器对应的系统是否运行正常;如果运行正常,根据第一变换数据,以及预先配置的pwm周期和死区时间,对当前pwm信号的占空比进行配置,输出配置后的目标pwm信号;基于目标pwm信号控制功率驱动单元模块,以控制永磁电机所处的工作模式;其中,工作模式至少包括以下之一:充电模式、放电模式、停机模式、待机模式和故障模式。
10.进一步的,控制器还包括:定时器模块和总接收模块;总接收模块与外部的上位机连接;定时器模块用于判断永磁电机所处的工作模式,根据工作模式,向总接收模块发送定时信号;总接收模块用于按照定时信号,接收上位机发送的控制命令和控制数据,以使控制器进入开中断状态。
11.进一步的,总接收模块包括第一接收模块和第二接收模块;第一接收模块通过can总线连接上位机;第二接收模块通过rs232总线连接上位机;控制命令包括:第一接收模块对应的can总线控制命令,以及第二接收模块对应的rs232总线控制命令。
12.进一步的,第一采集模块、定时器模块、驱动模块、第二采集模块、第三采集模块、第一接收模块、第二接收模块和存储模块的工作过程通过中断方式执行。
13.本发明提供的一种飞轮永磁电机控制系统,包括:永磁电机,以及上述任一项所述的飞轮永磁电机控制器;永磁电机与飞轮永磁电机控制器连接;飞轮永磁电机控制器用于根据输出的目标pwm信号,控制永磁电机的工作模式。
14.本发明提供了一种飞轮永磁电机控制器及控制系统,包括第一采集模块、第二采集模块、第三采集模块、第四采集模块和驱动模块;第一采集模块与外部的电压互感器及电流互感器连接;驱动模块与外部的功率驱动单元模块连接;第二采集模块与外部的霍尔传感器连接;第三采集模块与外部的旋转变压器连接;第四采集模块与外部的信号输入模块连接。该飞轮永磁电机控制器通过所集成的第一采集模块、第二采集模块、第三采集模块、第四采集模块和驱动模块,即可实现整个飞轮永磁电机控制器的搭建和算法实现,进而控制永磁电机的工作模式,不需要fpga来扩展接口,从而可以避免出现冗余,在保障控制器可靠性的前提下,降低了控制器成本,减小了电路板体积尺寸。
附图说明
15.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1为本发明实施例提供的一种飞轮永磁电机控制器的结构示意图;
17.图2为本发明实施例提供的另一种飞轮永磁电机控制器的结构示意图;
18.图3为本发明实施例提供的一种飞轮永磁电机控制器硬件接口示意图;
19.图4为本发明实施例提供的一种飞轮永磁电机控制系统的结构示意图;
20.图5为本发明实施例提供的一种飞轮永磁电机控制系统的流程图。
具体实施方式
21.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.目前,传统的一种飞轮永磁电机控制系统中多采用dsp2812+fpga控制架构,dsp2812主管控制运算,fpga主管信号采集与pwm输出。由于dsp2812是数字型架构,有些功能不完善,需要fpga来扩展接口,因而系统容易出现冗余,增加成本和电路板使用体积。基于此,本发明实施例提供了一种飞轮永磁电机控制器及控制系统,该技术可以应用于飞轮永磁电机充放电控制的应用中。
23.为便于对本实施例进行理解,首先对本发明实施例所公开的一种飞轮永磁电机控制器进行详细介绍。
24.参见图1所示的一种飞轮永磁电机控制器的结构示意图,包括:第一采集模块10、第二采集模块11、第三采集模块12、第四采集模块13和驱动模块14;第一采集模块10与外部的电压互感器15及电流互感器16连接;驱动模块14与外部的功率驱动单元模块17连接;第二采集模块11与外部的霍尔传感器18连接;第三采集模块12与外部的旋转变压器19连接;第四采集模块13与外部的信号输入模块20连接;第一采集模块10用于采集电压互感器15的电压原始信号,输出永磁电机的电压信号,采集电流互感器16的电流原始信号,输出永磁电机的电流信号;第二采集模块11用于采集霍尔传感器18的方波信号,输出飞轮的转速信号;第三采集模块12用于采集旋转变压器19的信号,输出永磁电机的角度信号;第四采集模块13用于采集信号输入模块20发送的外部输入信号,以根据外部输入信号判断是否对飞轮永磁电机控制器进行急停控制;驱动模块14用于接收目标数据,对目标数据进行变换处理,输出目标pwm信号,基于目标pwm信号控制功率驱动单元模块17,以控制永磁电机的工作模式;其中,目标数据包括:电压信号、电流信号、转速信号、角度信号和外部输入信号。
25.在实际实现时,上述飞轮永磁电机控制器可以采用一片tms320f28335芯片实现,该tms320f28335芯片是数字信号处理器,是一款tms320c28x系列浮点dsp控制器。与以往的定点dsp2812相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,a/d(analog/digital,模拟/数字)转换更精确快速等。tms320f28335具有150mhz的高速处理能力,具备32位浮点处理单元,6个dma(direct memory access,直接存储器存取)通道支持adc(analog-to-digital converte,模拟数字转换器)、mcbsp(multichannel buffered serial port,多通道缓冲串行口)和emif(external memory interface,外部存储器接口),有多达18路的pwm输出,其中有6路为更高精度的pwm输出(英文简称为hrpwm,英文全称为high resolution pulse width modulator,高分辨率脉宽调制),12位16通道adc。得益于其浮点运算单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代dsp相比,平均性能提高50%,并与定点c28x控制器软件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
26.上述第一采集模块10、第二采集模块11、第三采集模块12、第四采集模块13和驱动模块14是基于tms320f28335设计的5个硬件接口。
27.上述第一采集模块可以是tms320f28335芯片中的ad(analog to digital,模数转
换)模块,该第一采集模块通常与外部电压及电流互感器连接,通过采集电压及电流互感器信号,可以获得飞轮永磁电机的电压原始信号和电流原始信号,对电压原始信号和电流原始信号进行处理,可以输出飞轮永磁电机的电压信号和电流信号,一般采用ad中断方式采集。
28.上述第二采集模块可以是tms320f28335芯片中的cap(capacitor,非极性电容)模块,该第二采集模块通常与外部霍尔传感器连接,通过采集霍尔传感器的方波信号,计算单位时间内方波信号的脉冲数量,可以输出飞轮的转速信号,一般采用中断方式采集。
29.上述第三采集模块可以是tms320f28335芯片中的qep(quadrature encoder pulse,正交编码脉冲电路)模块,该第三采集模块通常与外部旋转变压器连接,通过采集旋转变压器的信号,计算单位时间内信号的脉冲数量,可以输出飞轮的角度信号,一般采用中断方式采集。
30.上述第四采集模块可以是tms320f28335芯片中的gpio(general purpose input output,通用输入/输出口)模块,该第四采集模块通常通过gpio查询方式采集外部输入io(input/output,输入/输出)信号的状态,用于急停控制,一旦io状态置位则系统停机,否则正常运行。
31.上述驱动模块可以是tms320f28335芯片中的pwm模块,该驱动模块接收第一采集模块输出的电压信号和电流信号、第二采集模块输出的转速信号、第三采集模块输出的角度信号和第四采集模块采集的外部输入信号,通过对飞轮永磁电机的电压信号、电流信号、飞轮的转速信号、飞轮永磁电机的角度信号,以及外部输入信号执行变换处理输出目标pwm信号,基于目标pwm信号控制功率驱动单元模块,以控制永磁电机的工作模式,一般采用中断方式执行。
32.上述功率驱动单元模块可以是tms320f28335芯片外部连接的igbt(insulated gate bipolar transistor,绝缘栅双极型晶体管)功率驱动单元,通过接收驱动模块输出的目标pwm信号,来驱动上述飞轮永磁电机,控制永磁电机所处的工作模式。
33.上述霍尔传感器是根据霍尔效应制作的一种磁场传感器,用于测速的霍尔传感器输出近似于方波,方波的周期随转速的快慢而变大变小,相对于普通机械量而言,霍尔传感器响应速度很快。
34.上述旋转变压器是一种电磁式传感器,又称同步分解器,它是一种测量角度用的小型交流电动机,用来测量旋转物体的转轴角位移和角速度。
35.上述外部的信号输入模块实际上是设置了一个外部急停按钮,可以产生io信号。外部电压互感器主要是用来给测量仪表和继电保护装置供电,用来测量线路的电压、功率和电能,或者用来在线路发生故障时保护线路中的贵重设备、电机和变压器;电流互感器是由闭合的铁芯和绕组组成,是把一次侧大电流转换成二次侧小电流来使用,二次侧不可开路,工作状态接近短路。
36.上述提供的飞轮永磁电机控制器,包括第一采集模块、第二采集模块、第三采集模块、第四采集模块和驱动模块;第一采集模块与外部的电压互感器及电流互感器连接;驱动模块与外部的功率驱动单元模块连接;第二采集模块与外部的霍尔传感器连接;第三采集模块与外部的旋转变压器连接;第四采集模块与外部的信号输入模块连接。该飞轮永磁电机控制器通过所集成的第一采集模块、第二采集模块、第三采集模块、第四采集模块和驱动
模块,即可实现整个飞轮永磁电机控制器的搭建和算法实现,进而控制永磁电机的工作模式,不需要fpga来扩展接口,从而可以避免出现冗余,在保障控制器可靠性的前提下,降低了控制器成本,减小了电路板体积尺寸。
37.进一步的,第一采集模块还用于:采集电压互感器的电压原始信号,对电压原始信号进行滤波、校正、补偿处理,输出永磁电机的电压信号;采集电流互感器的电流原始信号,对电流原始信号进行滤波、校正、补偿处理,输出永磁电机的电流信号。
38.上述滤波处理可以理解为将信号中特定波段频率滤除,抑制和防止干扰;上述校正处理和补偿处理可以理解为是为了获取准确信号而采取的处理手段;上述第一采集模块与电压互感器及电流互感器连接,采集电压互感器和电流互感器的原始信号,通过对原始信号进行滤波、校正、补偿处理,获得飞轮永磁电机电压、电流信息。
39.进一步的,第二采集模块还用于:采集霍尔传感器的方波信号;计算单位时间内,方波信号的第一脉冲数量;根据第一脉冲数量计算飞轮的转速信号。
40.上述单位时间可以设定为前后两个方波信号时间差,第二采集模块与霍尔传感器连接,采集霍尔传感器输出的方波信号;通过计算前后两个方波信号时间差内方波信号的脉冲数量;获得飞轮转速等信息。
41.进一步的,第三采集模块还用于:采集旋转变压器的输出信号,计算单位时间内,输出信号的第二脉冲数量;根据第二脉冲数量计算永磁电机的角度信号。
42.在实际实现时,旋转变压器的输出信号是两相正交的模拟信号,它们的幅值随着转角做正余弦变化,将输出信号变换成编码器形式输出,即正交的a,b,z信号。上述单位时间可以设定为前后两个方波信号时间差,第三采集模块与旋转变压器连接,采集转换后输出的a,b,z信号,通过计算前后两个信号时间差内信号的脉冲数量,获得飞轮电机的实时角度等信息。
43.进一步的,本发明实施例还公开了另一种飞轮永磁电机控制器,参见图2所示的另一种飞轮永磁电机控制器的结构示意图,控制器还包括:存储模块21;存储模块21与外部的存储器22连接;存储模块21用于存储目标数据,通过i2c(inter-integrated circuit)总线将目标数据发送给外部的存储器22。
44.上述存储模块可以是tms320f28335芯片中的i2c模块;该外部的存储器22通常为外部的flash存储器,又称闪存,在没有电流供应的条件下也能够长久地保持数据,其存储特性相当于硬盘。存储模块21可以存储飞轮永磁电机的电压信号、电流信号、飞轮的转速信号、飞轮永磁电机的角度信号,以及外部输入信号,并通过i2c总线将所存储的数据发送至外部的存储器22,以实现对数据的长久保存。
45.进一步的,驱动模块还用于:接收目标数据;对目标数据进行变换处理,得到处理后的第一变换数据;其中,变换处理包括:park(park transformation,派克)变换处理、clarke变换处理、执行pid(proportional
–
integral
–
derivative,比例-积分-微分)闭环算法处理、ipark变换处理、信号处理、扇区分配处理;根据目标数据判断控制器对应的系统是否运行正常;如果运行正常,根据第一变换数据,以及预先配置的pwm周期和死区时间,对当前pwm信号的占空比进行配置,输出配置后的目标pwm信号;基于目标pwm信号控制功率驱动单元模块,以控制永磁电机所处的工作模式;其中,工作模式至少包括以下之一:充电模式、放电模式、停机模式、待机模式和故障模式。
46.上述park变换处理就是将abc相变量系统各电磁量(电流、电压、磁链等),转换到以转子纵轴d、横轴q及静止轴0为坐标轴的dq0轴变量系统;clarke变换处理就是将abc变换到静止的αβ坐标系下;pid闭环算法处理:proportion(比例)就是输入偏差乘以一个常数,对当前时刻的偏差进行比例放大,integral(积分)就是对输入偏差进行积分运算,对过去所有时间的偏差进行积分,derivative(微分)对输入偏差进行微分运算,通过偏差的偏差,对控制系统的输出走向进行预判,起超前调节的作用;ipark变换处理从相对转子静止两相到相对定子静止的两相的变换;信号处理包括去毛刺和滤波,都是为了去除干扰,以得到更准确的信号;扇区分配处理:查表确定采样时刻给定电压矢量位于哪一扇区;计算合成电压矢量分解到这一扇区内两相邻电压矢量的导通时间;计算扇区内的矢量切换点。
47.上述目标数据包括:飞轮永磁电机的电压信号、电流信号、飞轮的转速信号、飞轮永磁电机的角度信号,以及外部输入信号。对电流信号进行clarke变换,再融入角度信号综合进行park变换,然后再对变换后的信号执行pid闭环算法、ipark变换,对ipark变换之后的信号进行滤波、去毛刺处理(对应上述信号处理),接着进行扇区判断,得到处理后的数据(对应上述第一变换数据)。根据目标数据判断电压是否过高、电流和角度是否过大、转速是否过高或过低、是否出现故障,若否,则说明控制器对应的系统运行正常;根据第一变换数据,以及预先配置的pwm周期和死区时间,对当前pwm信号的占空比进行配置,输出配置后的目标pwm信号。一般情况下,为了减小功耗,配置后的目标pwm信号对外部的驱动能力很小,但是飞轮永磁电机的功率比较高,如果直接用配置后的目标pwm信号去驱动显然是不行的,那么就需要引入功率驱动电路(对应上述功率驱动单元模块),通过配置后的目标pwm信号来控制功率驱动电路,由功率驱动电路产生大功率信号,来驱动上述飞轮永磁电机,控制永磁电机所处的工作模式;其中,工作模式可以是充电模式、放电模式、停机模式、待机模式和故障模式。
48.进一步的,控制器还包括:定时器模块和总接收模块;总接收模块与外部的上位机连接;定时器模块用于判断永磁电机所处的工作模式,根据工作模式,向总接收模块发送定时信号;总接收模块用于按照定时信号,接收上位机发送的控制命令和控制数据,以使控制器进入开中断状态。
49.以图2为例,控制器还包括:定时器模块23和总接收模块24;总接收模块24与外部的上位机25连接;上位机是指可以直接发出操控命令的计算机,一般提供用户操作交互界面并向用户展示反馈数据,可以是电脑,手机,平板,面板,触摸屏。定时器模块23给总线做定时,分时定时,有三个变量,等变量计数到一定值时,触发总线发送使能,使能完成之后,进行工作模式判断,三个总线有三个变量表征使能还是不使能,另外工作模式也有一个变量,表征是充电、放电还是停止模式;根据工作模式,向总接收模块发送定时信号。总接收模块按照定时信号,接收上位机发送的充电、放电、启动运行、停机的控制命令,以及设定的转速、电压、功率等控制数据,以使控制器进入开中断状态,中断是tms320f28335(对应上述控制器)自带功能,中断来了就执行后续的程序,中断没来就自动等待。
50.进一步的,总接收模块包括第一接收模块和第二接收模块;第一接收模块通过can总线连接上位机;第二接收模块通过rs232总线连接上位机;控制命令包括:第一接收模块对应的can总线控制命令,以及第二接收模块对应的rs232总线控制命令。
51.仍然以图2为例,上述总接收模块24包括第一接收模块26和第二接收模块27;第一
接收模块26通过can总线连接上位机25,用于接收上位机发送的can总线控制命令及对应的控制数据;第二接收模块27通过rs232总线连接上位机25,用于接收上位机发送的rs232总线控制命令及对应的控制数据。
52.进一步的,第一采集模块、定时器模块、驱动模块、第二采集模块、第三采集模块、第一接收模块、第二接收模块和存储模块的工作过程通过中断方式执行。
53.tms320f28335控制时钟系统具有片上振荡器,看门狗模块,支持动态pll(phase locked loop,锁相环)调节,内部可编程锁相环,通过软件设置相应寄存器的值改变cpu的输入时钟频率;8个外部中断,有专门的中断引脚,相对于tms320f2812x系列的dsp无专门的中断引脚,gpio0~gpio63连接到该中断,gpio00~gpio31连接到xint1、xint2及xnmi外部中断,gpio32~gpio63连接到xint3-xint7外部中断。同时,支持58个外设中断的外设中断扩展控制器pie(peripheral interrupt expansion,外设中断扩展),管理片上外设和外部引起的中断请求,符合ieee 1149.1标准的片内扫描仿真接口jtag(joint test action group,联合测试工作组)。中断是tms320f28335自带功能,中断来了就执行后续的程序,中断没来就自动等待。
54.为进一步理解上述实施例,参见图3所示的一种飞轮永磁电机控制器硬件接口示意图,包括:ad模块30(对应本技术的第一采集模块)、cap模块31(对应本技术的第二采集模块)、qep模块32(对应本技术的第三采集模块)、gpio模块34(对应本技术的第四采集模块)、pwm模块33(对应本技术的驱动模块)、can模块35(对应本技术的第一接收模块)、uart模块36(对应本技术的第二接收模块)、i2c模块37(对应本技术的存储模块)、定时器模块23;其中ad模块30与外部电压及电流互感器38连接;pwm模块33与igbt功率驱动单元39(对应本技术的功率驱动单元模块)连接;cap模块31与外部的霍尔传感器18连接;qep模块32与外部的旋转变压器19连接;gpio模块34与外部输入信号40(对应本技术的信号输入模块)连接;can模块35与上位机can通讯41(对应本技术的上位机)连接、uart模块36与上位机rs232通讯42(对应本技术的上位机)连接、i2c模块37与外部flash存储器43连接。
55.上述ad模块采集电压及电流互感器信号,获得飞轮电机电压、电流信息,采用ad中断方式采集。定时器模块用于can总线定时发送功能、飞轮充放电控制模式判断、rs232总线定时发送功能、i2c总线定时存储数据功能等,采用定时器中断方式执行。pwm模块执行矢量控制算法,完成park变换、clarke变换、ipark变换、扇区分配、pid闭环算法、pwm占空比配置及信号输出等,采用中断方式执行,pwm信号(对应本技术目标pwm信号)输出至igbt功率驱动单元。cap模块采集霍尔传感器信号,获得飞轮转速等信息,采用中断方式采集。qep模块采集旋转变压器信号,获得飞轮电机的实时角度等信息,采用中断方式采集。can模块接收上位机或触摸屏的can总线(对应上述上位机can通讯)控制命令和控制数据,采用中断方式接收。uart模块接收上位机或触摸屏的rs232总线(对应上述上位机rs232通讯)控制命令和控制数据,采用中断方式接收。gpio模块采集外部输入信号,用于外部急停判断等控制,采用查询方式采集。i2c模块可以存储飞轮永磁电机的电压信号、电流信号、飞轮转速信息、飞轮永磁电机的角度信息,以及外部输入信号,采用中断方式通过i2c总线发送数据给外部flash存储器。
56.在上述实施例的基础上,本发明还提供了另一种飞轮永磁电机控制系统,参见图4所示的一种飞轮永磁电机控制系统的结构示意图,包括:永磁电机44,以及上述任一项所述
的飞轮永磁电机控制器45;永磁电机44与飞轮永磁电机控制器45连接;飞轮永磁电机控制器45用于根据输出的目标pwm信号,控制永磁电机的工作模式。
57.在ccs3.3(code composer studio 3.3,软件集成开发环境)下,采用c语言开发基于tms320f28335数字信号控制器的永磁同步电机数字控制软件,在完成tms320f28335数字信号控制器的软件初始化后,通过tms320f28335的pwm口输出控制信号(对应本技术的控制命令和控制数据),通过c语言程序对电流互感器信号和转速进行采样,经过park变换和clark变换作为反馈,与上位机发送的参考给定值进行比较,并作为pid控制算法的输入量,其输出量经过ipark变换后生成给定电压矢量,并采用c语言配置pwm寄存器,输出svpwm信号(对应本技术的目标pwm信号),实现飞轮永磁电机的转速和转矩的数字控制,以及飞轮充放电控制。
58.为了便于理解,参见图5所示的一种飞轮永磁电机控制系统的流程图,如图5所示,控制器上电工作,完成系统初始化;上位机通过can总线或rs232总线发送飞轮永磁电机控制命令和控制数据给控制器,接收到命令后,触发第四采集模块执行对应的程序操作,具体的,gpio查询外部输入信号,判断是否对飞轮永磁电机控制器进行急停控制;若是则系统停机,否则正常运行。另外接收到命令后,控制器还打开中断,进入主循环,等待中断;判断是否进入中断等待状态;如果否,判断是否触发第一模块中断、第二模块中断、第三模块中断、定时器模块中断、驱动模块中断和存储模块中断;如果是,执行上述中断对应的程序操作。
59.其中第一模块中断对应的程序操作是采集电压互感器和电流互感器的原始信号;对原始信号进行滤波、校正、补偿处理;输出永磁电机的电压信号和电流信号。第二模块中断对应的程序操作是采集霍尔传感器的方波信号;计算单位时间内,方波信号的第一脉冲数量;输出飞轮的转速信号。第三模块中断对应的程序操作是采集旋转变压器的输出信号,计算单位时间内,输出信号的第二脉冲数量;输出永磁电机的角度信号。存储模块中断对应的程序操作是存储目标数据;通过i2c总线向存储器发送目标数据。定时器模块中断对应的程序操作是触发总线发送使能;工作模式判断;向总接收模块发送定时信号。
60.读取上述输出的电压信号、电流信号、转速信号、角度信号和外部输入信号(对应上述目标数据),发送给驱动模块中断子程序中的park变换、clarke变换进行信号处理,执行pid闭环算法处理、经过ipark变换处理后生成给定电压矢量,经信号处理、扇区分配处理后得到处理后的数据(对应上述第一变换数据),根据目标数据判断控制器对应的系统是否运行正常;如果运行不正常,关闭pwm输出,等待指令;如果运行正常,根据第一变换数据,以及预先配置的pwm周期和死区时间,对当前pwm信号的占空比进行配置,另外还根据上位机发送的各种命令进行不同的pwm配置;输出配置后的目标pwm信号;基于目标pwm信号控制功率驱动单元模块,以控制永磁电机所处的工作模式。
61.上述飞轮永磁电机控制系统,第一采集模块采集电压互感器、电流互感器的电压和电流原始信号,输出永磁电机的电压信号和电流信号;第二采集模块采集霍尔传感器的方波信号,输出飞轮的转速信号;第三采集模块采集旋转变压器的信号,输出永磁电机的角度信号;第四采集模块采集信号输入模块发送的外部输入信号,判断是否对飞轮永磁电机控制器进行急停控制;驱动模块接收目标数据,对目标数据进行变换处理,输出目标pwm信号以控制功率驱动单元模块,进而控制永磁电机的工作模式。本发明仅仅采用一片tms320f28335芯片即可实现整个飞轮永磁电机控制系统的搭建和算法实现,进而在保障系
统可靠性前提下,可以减小电路板体积尺寸,降低系统成本。
62.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1