一种基于永磁同步电动机无功电流控制的矢量控制方法
1.本技术涉及一种永磁同步电动机控制,尤其涉及一种基于永磁同步电动机无功电流控制的矢量控制方法,属于永磁同步电机控制技术领域。
背景技术:
2.永磁同步电动机以其运行效率高、功率密度高的优点在工业控制领域应用越来越广泛,特别是在高精度控制方面的应用已经占据主导地位。由于交流电动机数学模型都具有非线性和强耦合的特征导致其控制算法复杂,且电机控制性能易受参数变化的影响,即,现有的永磁同步电动机矢量控制都需要进行park和clark变换实现磁场正交解耦,计算量大且具有参数依赖性,不易于获得系统控制的高性能。本发明提供了一种利用永磁同步电动机电流分解得到的有功电流和无功电流可以独立控制转矩和磁场的特点,以及电压相位可以控制磁场方向的特点进行电动机矢量控制的技术解决方案。
技术实现要素:
3.在下文中给出了关于本发明的简要概述,以便提供关于本发明的某些方面的基本理解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
4.鉴于此,为解决现有技术中存在的永磁同步电机控制性能低的技术问题,本发明提供一种基于永磁同步电动机无功电流控制的矢量控制方法。
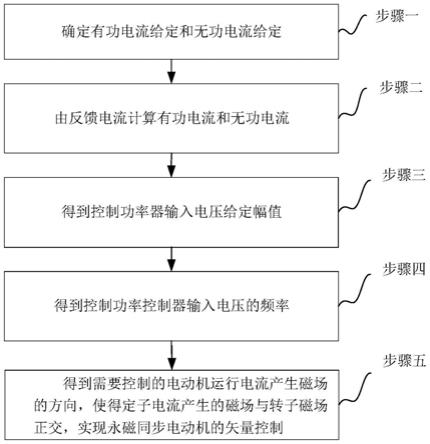
5.一种基于永磁同步电动机无功电流控制的矢量控制方法,包括以下步骤:
6.步骤一、确定有功电流给定和无功电流给定;
7.步骤二、由反馈电流计算有功电流和无功电流;
8.步骤三、得到控制功率器输入电压给定幅值;
9.步骤四、得到控制功率控制器输入电压的频率;
10.步骤五、由转子位置检测得到转子位置与a相绕组的夹角θ,确定电压的相位来控制电动机运行电流产生磁场的方向,使得定子电流产生的磁场与转子磁场正交,实现永磁同步电动机的矢量控制。
11.优选的,步骤一所述确定有功电流和无功电流给定的具体方法是,根据实时转速差由速度控制器确定有功电流给定;由转速给定和实时电机转速查询实验数据得到无功电流,无功电流根据转速给定确定控制过程需要的无功电流给定。
12.优选的,步骤三所述得到控制功率器输入电压给定幅值的具体方法是,由反馈电流计算有功电流和无功电流分别与有功电流给定和无功电流给定比较输入给电流控制器,得出控制功率控制器的输入电压给定幅值。
13.优选的,步骤四所述得到控制功率控制器输入电压的频率的具体方法是,由转速给定确定控制功率控制器的输入电压给定的频率。
14.优选的,步骤五所述磁场定向控制,由电压相位确定:由转子位置检测得到转子磁场位置可知需要控制定子电流磁场的位置实现定子磁场与转子磁场的正交控制,即,控制三相电压相位实现永磁同步电动机电流产生的磁场与转子磁场正交控制。
15.由此确定了控制功率控制器输出电压的调制电压信号的幅值、频率和相位,进而控制永磁同步电动机运行。
16.本发明的有益效果如下:本发明以电流响应作为控制关键参数,结合电机及系统额定点性能实验数据为控制参考,使得电机控制系统性能具有不依赖于电机参数的特点。本发明不同于传统的矢量控制,通过计算有功电流和无功电流来控制电机的转矩和磁场,根据转子磁场位置和功率因数角直接控制电压相位使得定子电流产生的磁场与转子磁场正交。解决了现有技术中存在的永磁同步电机控制算法复杂和计算量大的问题,提供了一种可以实现电机高性能控制的技术方案。
附图说明
17.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
18.图1为方法流程示意图;
19.图2为控制原理示意图;
20.图3为永磁同步电动机的相量示意图;
21.图4为求取相位差的电压和电流过零点和峰值对应示意图;
22.图5为计算功率因数角示意图;
23.图6为转子磁场位置确定示意图。
具体实施方式
24.为了使本技术实施例中的技术方案及优点更加清楚明白,以下结合附图对本技术的示例性实施例进行进一步详细的说明,显然,所描述的实施例仅是本技术的一部分实施例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
25.实施例1、参照图1-图6说明本实施方式,一种基于永磁同步电动机无功电流控制的矢量控制方法,包括以下步骤:
26.步骤一、确定有功电流给定和无功电流给定;
27.步骤二、由反馈电流(图2中的)计算有功电流和无功电流;
28.步骤三、得到控制功率器输入电压给定幅值;
29.步骤四、得到控制功率控制器输入电压的频率;
30.步骤五、由转子位置检测得到转子位置与a相绕组的夹角θ(图2中的∫,具体看图6d轴方向为转子磁场方向,ds轴为欲控制电机电流产生的磁场方向),计算得到电压的相位来控制电动机运行电流产生磁场的方向,使得定子电流产生的磁场与转子磁场正交,实现永磁同步电动机的矢量控制。
31.具体地,给定转速运行的永磁同步电动机电流包含两个分量,分别是控制电动机有功功率的有功电流分量和控制电动机无功功率的无功电流分量。当控制电动机的电压小
于电动机反电动势时,无功电流起着去磁作用,电流相位超前于电压;当控制电动机的电压大于电动机反电动势时,无功电流起着助磁作用,电流相位滞后于电压;当控制电动机的电压与电流相位相同,为无功电流为零控制。得出依据无功电流控制特点的电压幅值控制规律。
32.有功功率与电机输出转矩直接相关,转速一定,控制有功电流可以控制电机转矩;无功功率与电机磁场能量相关,控制无功电流可以控制气隙磁场幅值,因此,由永磁同步电动机电气量上响应的特点得到电压和电流的相位差,进而计算电流中控制转矩的电流分量和控制磁场的电流分量。
33.转矩和磁场控制由速度环和无功电流比较控制环节确定:有功电流分量大小根据控制系统转速响应需要,由速度控制器输出转矩大小确定;无功电流分量大小由控制系统根据转速给定和实时转速查询实验数据得到的无功电流参考确定。
34.磁场定向控制由电压相位确定:由转子位置检测得到转子磁场位置可知需要控制定子电流磁场的位置实现定子磁场与转子磁场的正交控制,即,控制三相电压相位实现永磁同步电动机电流产生的磁场与转子磁场正交控制。
35.两种可以相互校验计算准确性的有功电流和无功电流确定方法:1、交流电压一个周期有两个过零点和两个峰值点,三相电压有十二个可辨识点,三相电流有十二个可辨识点,运行频率一定就可以得到对应于电压和电流的相位差和电流幅值,由此可以计算电流的有功电流分量和无功电流分量;2、检测两相电流实时值计算功率因数角和电流幅值,电压和电流的相位差等于功率因数角。根据权利1中的永磁同步电动机运行特性,通过控制电压相位可以控制定子电流产生磁场的方向;控制有功电流分量i
p
可以控制电机转矩大小;控制无功电流分量iq可以控制气隙磁场幅值。
36.定子电流产生的磁场方向由检测到的转子位置通过控制电机三相电压相位实现,磁场幅值由控制三相电压大小实现。便于辨识的三相电压相位由转子位置与a相绕组夹角θ的特殊点进行确定,如交流电压四分之一周期中的0、90、30、60等电角度。
37.在电机处于额定负载的温升稳定后,实验测试永磁同步电动机的电流与电压相位差为零、电流相位超前于电压45
°
电角度和电流相位滞后于电压相位45
°
的几个典型频率点的电压、功率因数角和负载电流值,此时电机参数中电阻和电感参数为真实工作状态,为以此模型构建的控制提供精确的数学模型,是实现高精度控制的条件,也就是为控制目标转矩和目标磁场提供准确的参考数据。
38.以电流响应特征计算关键的两个电流分量使得永磁同步电动机矢量控制数学模型具有与电机参数无关性,并实现电机的磁场和转矩的独立控制。
39.计算得到电动机实际运行时的电流与电压的相位差,并得到控制转矩的有功电流分量和控制磁场的无功电流分量,实际控制中依据转速给定和无功电流给定控制电压的幅值大小。
40.由转子位置检测得到转子位置与a相绕组的夹角θ计算得到需要控制的电动机运行电流产生磁场的方向,使得定子电流产生的磁场与转子磁场正交。在θ的特殊点控制电压相位角具有更小的计算量,也就是更高的系统响应的实时性。
41.具体的,图2中的参数含义为:
42.n
ref
转速给定;
43.i电机状态检测电流;
44.n电机状态检测转速;
45.i
p
有功电流;
46.i
pref
有功电流给定;
47.i
qref
无功电流给定;
48.iq无功电流;
49.δn实时转速差;
50.svr速度控制器;
51.avr功率控制器;
52.u
ref
电压给定幅值;
53.f频率。
54.本发明的核心思路:通过检测和计算电流与对应电压相位差得到电机的有功电流分量和无功电流分量,由同步电动机运行时滞后无功电流和超前无功电流以及无功电流等于零的特性来控制电动机转矩的电流分量以实现电机的转矩控制,通过控制定子电压相位使得绕组电流产生的合成磁场方向与永磁同步电动机转子磁场方向正交实现永磁同步电动机的矢量控制。
55.永磁同步电动机矢量控制需要控制的参数有:电机的电压幅值、电压的频率和电压的相位。
56.1、控制电压幅值的目的是控制电机的转矩和磁场,控制转矩和磁场可以通过电机电流体现,具体有功电流或转矩电流控制转矩,无功电流或磁场电流控制磁场;
57.2、电压的频率控制电机转速,永磁同步电动机的转速与频率严格对应,即一个频率对应电机的一个转速;
58.3、控制电压相位是控制电机电流产生磁场方向,如果电机电流产生磁场的方向与转子磁场方向垂直或者说正交,则实现了永磁同步电动机的矢量控制。
59.具体的,图2给出包含速度环的电机控制系统框图,由速度给定和实际转速比较经速度控制器输出转矩控制电流分量i
pref
控制值,由查询实验数据得到的磁场控制电流给定i
qref
,分别与计算得到的有功电流分量i
p
和无功电流分量iq比较输出给电流控制器,综合需要的i
p
控制值和iq控制值输出电压幅值控制值,其中i
p
比较值和iq比较值由电流反馈环节计算得到。
60.图3给出一定电机转速时的反电动势在施加不同电压时电机电流与电压的向量关系。
61.具体地,根据检测计算得到的电流与电压的相位差确定电压幅值的控制规律。当电压小于反电动势时由图3的相量关系可以看出,电流相位超前于电压相位,实际控制时,增加电压幅值可以减小电压与电流间的相位差;
62.当电压与电流同相位时,电动机的无功电流分量等于零,也就是此时电流全部为转矩控制电流,电动机运行与功率因数等于1工况;
63.当电压大于反电动势时,由相量图可以看出,电流相位滞后于电压相位,实际控制时,减小电压幅值可以减小电压与电流间的相位差;
64.由图3可以给出实际控制时依据电流与电压相位差的要求,根据检测的相位差确
定了电流与电压间的超前与滞后关系,由此得出电压控制规律。
65.图4可以看出,以三相永磁同步电动机控制的a相为例,在电气分辨周期内,给出图4通过电压过零点、峰值点与电流过零点和峰值点间的时间差δt求取相位差。
[0066][0067]
其中ω=2πf,f为电压频率。
[0068]
电机稳定运行时f与转速有严格的对应关系。
[0069]
两种检测和计算电流与电压相位差的方法:
[0070]
一种是:图4中,交流电压一个周期有两个过零点和两个峰值点,三相电压有十二个可辨识点,三相电流有十二个可辨识点,运行频率一定就可以得到对应于电压和电流的相位差和电流幅值,由此可以计算电流的有功电流分量和无功电流分量。根据图3永磁同步电动机运行特性,通过控制电压幅值进行相位差控制,实现控制有功电流分量i
p
和无功电流分量iq的大小。
[0071]
另一种是:检测两相电流,另一相电流由下式计算得出:
[0072]
ib=-(ia+ic)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0073]
由图5检测两相电流a相电流ia和c相电流ic计算电流最大值im和相位差得到i
p
和iq。
[0074][0075]
当ia+2ic≠0时,求出:
[0076][0077]
可得:
[0078]
当ia≠0时,
[0079]
求得:
[0080]
求得:
[0081]
计算出的有功电流分量和无功电流分量决定了电动机运行时需要控制的转矩和磁场,由此给出控制电压的幅值,具体电流产生磁场方向由图6确定电压的相位。
[0082]
图6给出转子磁场与a相绕组间的位置确定图,对于永磁同步电动机有θ=ωt。
[0083]
定子电流磁场方向由图6的ds轴所示,检测到的转子位置得到控制电机三相电压相位实现,磁场幅值由控制三相电压大小实现。
[0084]
具体地,便于辨识的三相电压相位由转子位置与a相绕组夹角θ的特殊点进行确定,如交流电压四分之一周期中,在对应电压与电流相位差加上转子转角θ电角度,即:
[0085]
当电流相位超前电压时取
“‑”
,反之取“+”。
[0086]
检测转子位置得到转子位置与a相绕组的夹角θ计算得到需要控制的电动机运行电流产生磁场的方向,使得定子电流产生的磁场与转子磁场正交。
[0087]
在时间可分辨范围内,在θ的特殊点控制电压相位角具有更小的计算量,也就是更高的系统响应的实时性。
[0088]
综合上述,控制定子电流的有功电流和无功电流大小可以实现电机转矩控制和磁场控制;根据转子位置与a相绕组夹角θ控制电机电压相位实现定子电流产生磁场幅值的位置控制,当该磁场幅值方向与转子磁场方向垂直,实现磁场正交控制,也就是永磁同步电动机的矢量控制。
[0089]
尽管根据有限数量的实施例描述了本发明,但是受益于上面的描述,本技术领域内的技术人员明白,在由此描述的本发明的范围内,可以设想其它实施例。此外,应当注意,本说明书中使用的语言主要是为了可读性和教导的目的而选择的,而不是为了解释或者限定本发明的主题而选择的。因此,在不偏离所附权利要求书的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。对于本发明的范围,对本发明所做的公开是说明性的,而非限制性的,本发明的范围由所附权利要求书限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1