一种电缆管道智能巡检仪的制作方法
1.本发明属于管道检查技术领域,特别涉及一种电缆管道智能巡检仪。
背景技术:
2.地下电缆作为城市电网的重要组成部分,当其发生故障时,会对城区居民供电造成较大影响。但由于地下环境的复杂性,电缆管道排管作业,排管施工质量检查或管内电缆的敷设等往往是电网建设与施工过程中的棘手问题。单纯依靠人力作业会存在费用较高、工作效率低下、操作不便等局限。再则因管道内环境恶劣,容易对人身造成伤害,需要“机器人”代替人工进行工作。尤其在近些年用电密度不断提升,设备种类和数量非常多,而电力作业人员数量少,运维工作量大,提升电缆管道巡检的质量和效率这一需求愈加迫切。
技术实现要素:
3.本发明的目的是为了克服现有技术上述缺点,提出一种电缆管道智能巡检仪。
4.为了实现上述目的,本发明采用以下技术方案:一种电缆管道智能巡检仪,包括用于穿过管道的龙骨、滑动连接在龙骨上的检测装置、用于驱动检测装置在龙骨上滑动的驱动装置;检测装置包括和龙骨滑动套接的滑座、两个检测触角;滑座和龙骨滑动套接的滑套、两个套在滑套上的转动套;滑套和转动套同轴,转动套和检测触角一一对应;检测触角包括一端和转动套转动连接的转动杆、位于转动杆另一端的摄像头、位于转动杆上的温度传感器;滑座上设有用于锁死转动套的第一锁死机构、用于锁死转动杆的第二锁死机构。
5.作为优选,龙骨由若干连接杆首尾相接而成。
6.作为优选,连接杆一端设有内螺纹槽,另一端设有用于和对应的内螺纹槽配合和外螺纹头。
7.作为优选,连接杆和外螺纹头为一体成型结构。
8.作为优选,滑套外侧固接有环形凸起,环形凸起位于转动套之间;第一锁死机构包括和环形凸起固接的中间轮、啮合在中间轮相对两侧的侧轮、位于环形凸起内的腔体、滑动连接在腔体内的滑块、位于腔体内的用于对滑块施加向滑套的力的第一弹簧、和滑块固接的升降杆、固接在升降杆远离滑块的一端的横杆、固接在横杆两端的卡头;侧轮和对应的转动套转动连接,横杆的中部和升降杆固接,侧轮上侧均设有若干用于和卡头配合的卡槽,卡槽以侧轮的轴为中心呈环形阵列布置,卡槽的槽底设有斜面;滑套外侧固接有导向块,转动套内侧设有用于躲避导向块的躲避槽,转动套外侧设有凹槽,凹槽内转动连接有转轴,转动杆一端位于凹槽内并和转轴固接,转轴固接有齿轮,躲避槽的槽底设有插槽,插槽的一侧设有侧槽;第二锁死机构包括滑动连接在插槽内的顶杆、位于侧槽内的用于顶杆施加向滑套的力的第二弹簧;顶杆用于和齿轮配合;导向块上设有转动套转动后驱动顶杆向齿轮运动的导向面。
9.作为优选,驱动装置包括和龙骨固接的齿条、位于滑座上的电机、和电机连接的驱
动轮;驱动轮和齿条配合。
10.作为优选,龙骨的材质为塑料。
11.本发明的有益效果是:调节检测触角和龙骨之间的夹角,以此来改变摄像头和龙骨的间距,从而适配管道的半径,调节好了之后,把两只手握住两个检测触角,然后掰开,两个摄像头可以全面观察到管道内的线路,龙骨不会挡住视线,360度无死角,而温度传感器可以检测管道内的温度,当某处线路出问题的时候,会形成局部高温,方便发现问题。电机连接有一个遥控器,操作人员在地面上通过遥控器可以控制电机运行,然后在齿条和驱动轮的作用下,滑座前进,对管道进行巡检,不需要人进入管道。
附图说明
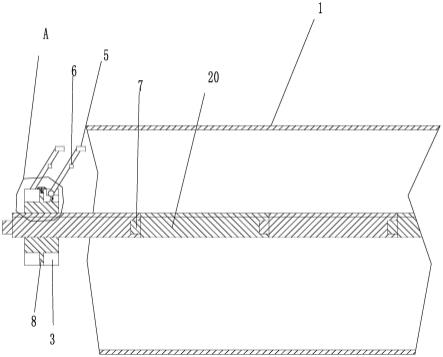
12.图1为实施例示意图;图2为实施例另一个示意图;图3为图1的a处放大图;图4为图3的b-b剖视图;图5为侧轮俯视图;图6为图5的圆圈c剖视图;图7为转动杆靠拢时的示意图;图8为顶杆和齿轮脱开时的示意图。
13.图中:管道1、滑套2、转动套3、转动杆4、摄像头5、温度传感器6、外螺纹头7、环形凸起8、中间轮9、侧轮10、升降杆11、横杆12、卡头13、导向块14、转轴15、齿轮16、顶杆17、导向面18、齿条19、连接杆20、卡槽21。
具体实施方式
14.下面结合附图和具体实施方式对本发明进一步详细阐述:实施例:参见图1到图8,一种电缆管道智能巡检仪,包括用于穿过管道1的龙骨、滑动连接在龙骨上的检测装置、用于驱动检测装置在龙骨上滑动的驱动装置;检测装置包括和龙骨滑动套接的滑座、两个检测触角;滑座和龙骨滑动套接的滑套2、两个套在滑套2上的转动套3;滑套2和转动套3同轴,转动套3和检测触角一一对应;检测触角包括一端和转动套3转动连接的转动杆4、位于转动杆4另一端的摄像头5、位于转动杆4上的温度传感器6;滑座上设有用于锁死转动套3的第一锁死机构、用于锁死转动杆4的第二锁死机构。
15.龙骨由若干连接杆20首尾相接而成。
16.连接杆20一端设有内螺纹槽,另一端设有用于和对应的内螺纹槽配合和外螺纹头7。
17.连接杆20和外螺纹头7为一体成型结构。
18.滑套2外侧固接有环形凸起8,环形凸起8位于转动套3之间;
第一锁死机构包括和环形凸起8固接的中间轮9、啮合在中间轮9相对两侧的侧轮10、位于环形凸起8内的腔体、滑动连接在腔体内的滑块、位于腔体内的用于对滑块施加向滑套2的力的第一弹簧、和滑块固接的升降杆11、固接在升降杆11远离滑块的一端的横杆12、固接在横杆12两端的卡头13;侧轮10和对应的转动套3转动连接,横杆12的中部和升降杆11固接,侧轮10上侧均设有若干用于和卡头13配合的卡槽21,卡槽21以侧轮10的轴为中心呈环形阵列布置,卡槽21的槽底设有斜面;滑套2外侧固接有导向块14,转动套3内侧设有用于躲避导向块14的躲避槽,转动套3外侧设有凹槽,凹槽内转动连接有转轴15,转动杆4一端位于凹槽内并和转轴15固接,转轴15固接有齿轮16,躲避槽的槽底设有插槽,插槽的一侧设有侧槽;第二锁死机构包括滑动连接在插槽内的顶杆17、位于侧槽内的用于顶杆17施加向滑套2的力的第二弹簧;顶杆17用于和齿轮16配合;导向块14上设有转动套3转动后驱动顶杆17向齿轮16运动的导向面18。
19.驱动装置包括和龙骨固接的齿条19、位于滑座上的电机、和电机连接的驱动轮;驱动轮和齿条19配合。
20.龙骨的材质为塑料。
21.实施例原理:根据管道的长短把若干个连接杆20组装起来形成龙骨,然后龙骨穿过管道,滑座从龙骨一端滑入,此时,检测触角位于龙骨上侧,参见图7,此时,检测触角靠的比较近,顶杆17和齿轮16脱开,检测触角可以自由转动,参见图8,调节检测触角和龙骨之间的夹角,以此来改变摄像头5和龙骨的间距,从而适配管道的半径,调节好了之后,把两只手握住两个检测触角,然后掰开,参见图2,此时,两个转动套3转动方向相反,转动套3和滑套2相对转动,在中间轮9的作用下,侧轮10转动,横杆12两端的卡头13是嵌入在对应的卡槽21内的,当侧轮10转动的时候,在斜面的作用下,卡头13做上下运动,经过一个又一个的卡槽21,斜面的作用是使得侧轮10只能单向转动;当两个检测触角掰开到最大程度的时候,参见图2,此时,在导向面18的作用下,顶杆17顶紧在齿轮16上,把齿轮16锁死,检测触角不能转动,另外,把手放开后,卡槽21和卡头13配合,侧轮10不会反向转动,此时,两个摄像头5可以全面观察到管道内的线路,龙骨不会挡住视线,360度无死角,而温度传感器6可以检测管道内的温度,当某处线路出问题的时候,会形成局部高温,方便发现问题,电机连接有一个遥控器,操作人员在地面上通过遥控器可以控制电机运行,然后在齿条19和驱动轮的作用下,滑座前进,对管道进行巡检,不需要人进入管道。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1