一种带断电保护的UPS供电系统及UPS管理电路的制作方法
一种带断电保护的ups供电系统及ups管理电路
技术领域
1.本发明涉及到自动控制技术领域,特别涉及一种带断电保护的ups供电系统及ups管理电路。
背景技术:
2.目前在自动控制领域开始出现协作机器人,而协作机器人一般都是采用定制电脑,但是自动控制系统的电源往往不稳定,突然的断电或者人为的直接关闭电源都会造成协作机器人的电脑系统非正常关机,长期非正常关机会造成协作机器人的电脑系统故障。
3.而配置ups的系统,需要人工启动和关闭ups,造成操作繁琐。
技术实现要素:
4.有鉴于此,本发明提供了一种带断电保护的ups供电系统及ups管理电路。本发明能够在总电源意外断电,自动关闭协作机器人和ups,不需人员管理,大大节约人力。
5.为了实现上述目的,本发明所采取的技术方案为:
6.一种带断电保护的ups供电系统,包括通过导线依次串联的总电源输出端、空气开关、ups和协作机器人,还包括第一继电器、第二继电器、第三继电器、开关电源和plc系统;
7.所述第一继电器电源输入端与空气开关的电源输出端连接,第一继电器的常开输出端口、第二继电器的常闭输出端口和ups的控制端口构成回路;第一继电器的常闭输出端口与plc系统的输入端口连接;
8.所述开关电源的输入端与ups的输出端连接;开关电源的输出端分别连接第二继电器的电源输入端和plc系统的电源输入端,用于为第二继电器和plc系统供电;
9.第三继电器的电源输入端连接plc系统的电源输出端,第三继电器的常开输出端口与ups的控制端口连接;
10.当空气开关断开时,plc系统检测到第一继电器的常闭输出端的断电信号,立即通过tcp/ip命令远程关闭协作机器人,并在接收到协作机器人已关闭信号后给第三继电器进行通电。
11.进一步的,所述第一继电器采用ac线圈,第二继电器和第三继电器均采用dc线圈。
12.一种ups管理电路,包括通过导线依次串联的总电源输出端、空气开关、ups和协作机器人,还包括第一继电器、第二继电器、第三继电器、开关电源和延时继电器;
13.所述第一继电器电源输入端与空气开关的电源输出端连接,第一继电器的常开输出端口、第二继电器的常闭输出端口和ups的控制端口构成回路;
14.所述开关电源的输入端与ups的输出端连接;开关电源的输出端分别连接第二继电器的电源输入端和第三继电器的电源输入端,开关电源的输出端与第三继电器的电源输入端之间连接有第一继电器的常闭端;
15.ups的控制端还与延时继电器的输出端连接,延时继电器的输入端通过第三继电器的常闭端口与开关电源的输出端连接;
16.第三继电器的常开端与协作机器人的输入端连接。
17.进一步的,所述第一继电器采用ac线圈,第二继电器和第三继电器均采用dc线圈;延时继电器为断电延迟型,触点为延时接通型。
18.本发明采取上述技术方案所产生的有益效果在于:
19.1、本发明系统通过相互配合的第一继电器、第二继电器和第三继电器实现了ups的自动启动,并且能够在总电源意外断电,自动关闭协作机器人和ups,不需人员管理,大大节约人力。
20.2、本发明电路通过相互配合的第一继电器、第二继电器和第三继电器等实现了ups的自动启动,并且能够在总电源意外断电,自动关闭ups的启动开关并通过延时继电器关闭协作机器人,不需人员管理,大大节约人力。
附图说明
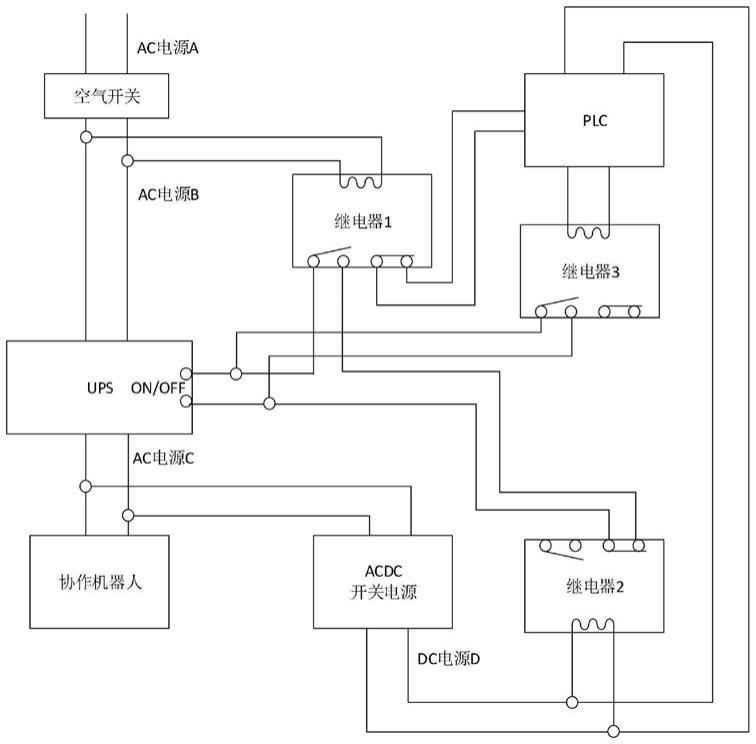
21.图1是本发明实施例中ups供电系统的电路原理图。
22.图2是本发明实施例中ups管理电路的电路原理图。
具体实施方式
23.下面,结合附图和具体实施方式对本发明做进一步的说明。
24.为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.一种带断电保护的ups供电系统,包括通过导线依次串联的总电源输出端、空气开关、ups和协作机器人,还包括第一继电器、第二继电器、第三继电器、开关电源和plc系统;
26.所述第一继电器电源输入端与空气开关的电源输出端连接,第一继电器的常开输出端口、第二继电器的常闭输出端口和ups的控制端口构成回路;第一继电器的常闭输出端口与plc系统的输入端口连接;
27.所述开关电源的输入端与ups的输出端连接;开关电源的输出端分别连接第二继电器的电源输入端和plc系统的电源输入端,用于为第二继电器和plc系统供电;
28.第三继电器的电源输入端连接plc系统的电源输出端,第三继电器的常开输出端口与ups的控制端口连接;
29.当空气开关断开时,plc系统检测到第一继电器的常闭输出端的断电信号,立即通过tcp/ip命令远程关闭协作机器人,并在接收到协作机器人已关闭信号后给继电器3进行通电。
30.进一步的,所述第一继电器采用ac线圈,第二继电器和第三继电器均采用dc线圈。
31.本实施例的工作原理:
32.参照图1,启动过程:当空气开关接通后,ac电源a的电源到达ac电源b处。此时,继电器1导通,继电器2和继电器3未导通,继电器1通电时,继电器1的常闭输出端口打开。
33.继电器1导通后,继电器1的常开输出端闭合并与继电器2的常闭输出端对ups进行启动,3秒后,ups启动。
34.ups启动后,ac电源c处得电,开关电源得电,继电器2导通,继电器2的常闭端断开,
ups的启动信号断开,启动完毕。
35.关闭过程:当空气开关断开或者ac电源a突然失电时,继电器1断开,plc检测到继电器1的常闭输出端的断电信号,立即通过通过tcp/ip命令远程关闭与ups电源输出端连接的协作机器人,并在接收到协作机器人已关闭信号后给继电器3进行通电。
36.继电器3得电后,其常开输出端闭合并对ups关闭,3秒后,ups关闭,ac电源c失电,开关电源失电,plc失电,继电器3失电,继电器3的常开端断开,ups关闭信号完毕。
37.系统中的ups控制信号为接通3秒有效,即接通3秒后,如果当前为关机状态则开机,如果当前为开机状态则关机。
38.继电器1为ac线圈。
39.系统中的继电器2和继电器3为dc线圈。
40.下面为另一个实施例:
41.参照图2,本实施例包括通过导线依次串联的总电源输出端、空气开关、ups和协作机器人,还包括第一继电器、第二继电器、第三继电器、开关电源和延时继电器;
42.所述第一继电器电源输入端与空气开关的电源输出端连接,第一继电器的常开输出端口、第二继电器的常闭输出端口和ups的控制端口构成回路;
43.所述开关电源的输入端与ups的输出端连接;开关电源的输出端分别连接第二继电器的电源输入端和第三继电器的电源输入端,开关电源的输出端与第三继电器的电源输入端之间连接有第一继电器的常闭端;
44.ups的控制端还与延时继电器的输出端连接,延时继电器的输入端通过第三继电器的常闭端口与开关电源的输出端连接;
45.第三继电器的常开端与协作机器人的输入端连接。
46.进一步的,所述第一继电器采用ac线圈,第二继电器和第三继电器均采用dc线圈;延时继电器为断电延迟型,触点为延时接通型。
47.本实施例的工作原理:
48.启动过程:当空气开关接通后,ac电源a的电源到达ac电源b处。此时,继电器1导通,继电器2和继电器3未导通,继电器1通电时,继电器1的常闭输出端口打开。
49.继电器1导通后,继电器1的常开输出端闭合并与继电器2的常闭输出端对ups进行启动,3秒后,ups启动。
50.ups启动后,ac电源c处得电,开关电源得电,继电器2导通,继电器2的常闭端断开,ups的启动信号断开,启动完毕。
51.关闭过程:当空气开关断开或者ac电源a突然失电时,继电器1断开,继电器3线圈通过继电器1的常闭端和dc电源d接通后得电。继电器3的常开端给协作机器人关机信号,延时继电器的线圈因继电器3的常闭端断开后失电,延时30秒后,延时继电器的延时接通触点导通,给ups关闭信号。3秒后,ups自动关闭。
52.系统中的ups控制信号为接通3秒有效,即接通3秒后,如果当前为关机状态则开机,如果当前为开机状态则关机。
53.继电器1为ac线圈。系统中的继电器2和继电器3为dc线圈。系统中的延时继电器为断电延时类型,触点为延时接通类型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1