一种电机控制方法、电机、车辆、储存介质以及计算机与流程
1.本发明涉及电机控制技术领域,具体涉及一种电机控制方法、电机、车辆、储存介质以及计算机。
背景技术:
2.随着新能源电气化的趋势发展,现在越来越多的车采用电机驱动控制器,然而常规的电机驱动采用spwm(sine pulse width modulation)调试,该调试方式的母线电压电压利用率较差;人们进一步提出了cpwm(continuous pulse width modulation)调试和dpwm(discontinuous pulse width modulation)调试的方式来提升了母线电压的利用率。但是,spwm和cpwm相比与dpwm却存在在一个运行控制周期内,开关动作次数多于dpwm;但是dpwm的开关管的动作是固定变化的,比如dpwm1方式的驱动控制,此时为保证系统在最大电流下没有开关动作,需要采用恒功率控制方式,及需要保证功率因数角恒为1,再比如dpwm2,为保证系统在最大电流下没有开关动作,需要保证因数角为0.866;然而驱动系统在新能源车上的工况是变化的,且功率因数角是时变的。因此,dpwm不能适配不同的负载工况去调整开关管的动作时序,造成只能在某些特性工况下,保证驱动系统在大电流的时候不存在开关管动作,但是不具备通用性。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种通过引入功率因素角的在线调整,确保了驱动系统在大电流的时候不存在开关管动作,提升了系统的驱动效率,保证了该方案的普适性的电机控制方法、电机、车辆、储存介质以及计算机。
4.为了解决上述技术问题,本发明采用的第一种技术方案为:
5.一种电机控制方法,
6.预设电机的三相电压满足公式(1)的要求:
[0007][0008]
预设电机的三相电流满足公式(2)的要求:
[0009][0010]
其中,为功率因数角;所述u
zero
为零序电压分量;
[0011]
调节角度移动电压波形的调制区间。
[0012]
优选地,运行在功率因数角度为0的时候,电压输出与电流输出保持同相位;
[0013]
同一零序电压表示为公式(3);
[0014][0015]
优选地,指令输出电压表示为公式(4)。
[0016][0017]
优选地,所述u
zero
=0时,采用spwm调制控制方式。
[0018]
优选地,采用spwm调制控制方式时某一相的参考输出电压在的周期内。
[0019]
优选地,所述u
zero
=ucos(3ωt)时,采用svpwm调制控制方式。
[0020]
为了解决上述技术问题,本发明采用的第二种技术方案为:
[0021]
一种电机,包括电机控制器和电机系统,所述电机控制器根据上述的电机控制方法控制电机系统的运行。
[0022]
为了解决上述技术问题,本发明采用的第三种技术方案为:
[0023]
一种车辆,包括上述的电机。
[0024]
为了解决上述技术问题,本发明采用的第四种技术方案为:
[0025]
一种存储介质,所述存储介质存储有执行上述电机控制方法的计算机程序。
[0026]
为了解决上述技术问题,本发明采用的第五种技术方案为:
[0027]
一种计算机,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述电机控制方法。
[0028]
本发明的有益效果在于:通过保证电机驱动系统在运行过程中,通过实时调节功率因数角,移动电压波形的调制区间;保证电机电流在峰值及附件不存在开关管的动作,从而降低了驱动系统的工作损耗,保证了驱动系统的工作效率最大,从而提升了新能源整车的续航里程。
附图说明
[0029]
图1为dpwm调制图;
[0030]
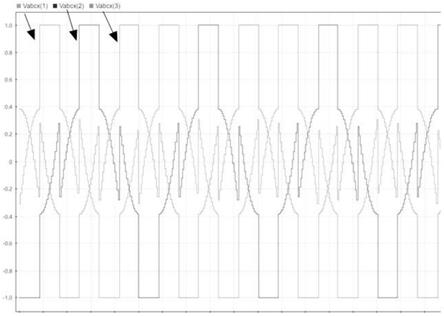
图2为本发明具体实施方式的一种电机控制方法输出的电压波形。
具体实施方式
[0031]
为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
[0032]
实施例一
[0033]
请参照图1以及图2,一种电机控制方法,
[0034]
预设电机的三相电压满足公式(1)的要求:
[0035][0036]
预设电机的三相电流满足公式(2)的要求:
[0037][0038]
其中,为功率因数角(电机控制器的电压矢量和电流矢量的相位差);所述u
zero
为零序电压分量,通过选择不同类型的零序分量,可以实现不同的调制控制器方式;
[0039]
所述u
zero
=0时,采用spwm调制控制方式。
[0040]
所述u
zero
=ucos(3ωt)时,采用svpwm(space vectorpulse width modulation)调制控制方式。
[0041]
对于dpwm控制调试来说,其基本原则就是保证某一相的参考输出电压在的周期内,即120
°
区间内不存在开关管的动作,保证系统开关损耗相比于svpwm来说可以减小的开关损耗。
[0042]
但是普通的dpwm方案的开关管的动作,是没有结合输出电流的大小的,因此会存在,在电流值比较大的时候存在开关管的动作,造成系统比较大的损耗;或者如上文所说,存在某种调制方式,比如dpwm1方式的驱动控制,此时为保证系统在最大电流下没有开关动作,需要采用恒功率控制方式,及需要保证功率因数角恒为1,然而这种控制当式,在系统其他点工作的时候,并不是系统的效率最优点。
[0043]
因此,本技术的技术方案避免了上述开关过程中存在的缺陷,结合系统运行过程中的功率因数角,动态调整电机控制器的开关时序,保证了系统的损耗最小,效率最高;
[0044]
见图1,通过在dpwm控制调试的基础上调节角度移动电压波形的调制区间。
[0045]
运行在功率因数角度为0的时候,电压输出与电流输出保持同相位;
[0046]
同一零序电压表示为公式(3);
[0047][0048]
指令输出电压表示为公式(4)。
[0049][0050]
当时,输出的三相电压的波形见图2所示。
[0051]
实施例二
[0052]
一种电机,包括电机控制器和电机系统,所述电机控制器根据实施例一所述的电机控制方法控制电机系统的运行。
[0053]
实施例三
[0054]
一种车辆,包括实施例二所述的电机。
[0055]
实施例四
[0056]
一种存储介质,所述存储介质存储有执行实施例一所述电机控制方法的计算机程序。
[0057]
实施例五
[0058]
一种计算机,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现实施例一所述电机控制方法。
[0059]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1