一种宽转速负载范围电励磁双凸极电机励磁电流与电枢电流协同优化控制方法
1.本发明涉及电机控制技术领域,具体涉及一种宽转速负载范围电励磁双凸极电机励磁电流与电枢电流协同优化控制方法。
背景技术:
2.电励磁双凸极电机作为一种新型特种磁阻电机,具有结构简单可靠、控制灵活、容错性能好等优点,在航空、风力发电等领域受到广泛关注。电励磁双凸极电机的宽转速负载范围运行工况下,若采用额定电流励磁存在损耗大的缺点。目前国内外有关电励磁双凸极电机的励磁电流与电枢电流协同控制研究尚处于起步阶段。
3.明庆永等公开的“基于查表法的电励磁双凸极电机建模研究”(电机与控制应用,2021年,第48卷,第6期,49-56+62页)提出了一种基于查表法的建模方法,通过有限元仿真分别建立磁链与转矩关于电流与转子位置角度关系的数据表,采用simulink三位查表法,分别对dsem磁链函数和转矩函数进行建模,并与电压方程一起构成dsem仿真模型。
4.夏长亮等公开的“基于铁耗在线计算的最小损耗预测电流控制方法”(中国电机工程学报,2018年,第38卷,第01期,266-274+364页)论文中提出一种基于铁损在线计算的最小损耗预测电流控制方法。将定子电流铁耗分量的观测结果引入电流预测过程中,消除传统预测电流控制方法中忽略铁耗引起的电流跟踪误差。这种方法具有良好的动态性能、电流跟踪效果及损耗抑制效果。但这种在线控制方法需要设计观测器对定子电流的铁耗分量进行实时观测,工艺复杂,可移植性不强,不适用于电励磁双凸极电机的控制应用。
5.陆子卿公开的“高速电励磁双凸极电动机换相控制技术及损耗研究”(南京航空航天大学,2019)针对电机高速运行会使电机的风摩擦损耗及铁芯损耗增加的现象,研究其换相控制策略,选择合适提前角度获得较高转矩。分析了采用不同换相策略时的电机损耗及电机运行效率,选择合适换相策略,可以获得较高的电机运行效率。但是这种方法在相位延迟估算过程中存在不确定性,尤其在电机高速状态下对控制算法的动态响应性能要求较高。
6.本发明专利提出了一种宽转速负载范围电励磁双凸极电机励磁电流与电枢电流协同优化控制方法,控制算法简单,可移植性较强,能够在宽转速负载工况下降低系统损耗,提高系统效率。
技术实现要素:
7.发明目的:针对现有电励磁双凸极电机系统宽转速负载范围均将励磁电流控在额定值带来较大损耗,导致系统效率低的问题,本发明提出了一种宽转速负载范围电励磁双凸极电机励磁电流与电枢电流协同优化控制方法。
8.技术方案:为实现本发明的目的,本发明所采用的技术方案是:
9.一种宽转速负载范围电励磁双凸极电机励磁电流与电枢电流协同优化控制方法,
所述方法具体如下:
10.s1:建立包含铁损与铜损的电励磁双凸极电机有限元损耗计算模型,并仿真计算获得不同转速n、电磁转矩te下对应的损耗最小的励磁电流if与电枢电流i
p
组合;
11.s2:电励磁双凸极电机系统转速外环输出作为转矩参考值,结合电机当前转速,根据上述损耗组合,得到该工况下的励磁电流i
f_ref
与电枢电流给定为i
p_ref
;
12.s3:电励磁双凸极电机励磁绕组接不对称半桥变换器,对励磁电流进行闭环控制;电枢绕组采用全桥变换器驱动,根据上述励磁电流与电枢电流给定值、以及当前转子位置进行电流闭环控制,得到两个变换器中各功率器件的驱动信号。
13.所述步骤s1建立励磁电流和电枢电流组合表,具体如下:
14.s1.1:建立包括铁损与铜损的电励磁双凸极电机的有限元损耗计算模型;
15.s1.2:根据电机运行转速及负载转矩范围,分别在转速n1、n2...ni...nm负载转矩为t
e1
、t
e2
...t
ej
...t
ek
的m
×
k个工况下仿真计算得到m
×
k个电机损耗最小励磁电流if与电枢电流i
p
组合(i
f1,1
,i
p1,1
)、(i
f1,2
,i
p1,2
)...(i
fi,j
,i
pi,j
)...(i
fm,k
,i
pm,k
)。
16.所述步骤s2系统转速外环输出作为转矩参考值,结合电机当前转速,根据上述损耗组合,得到该工况下的励磁电流给定i
f_ref
与电枢电流给定i
p_ref
,具体如下:
17.s2.1:将电机当前转速n与电机给定转速n_
ref
做差输入到比例积分调节器,调节器输出为电磁转矩参考值t
e_ref
;
18.s2.2:基于电磁转矩参考值t
e_ref
与电机当前转速n,根据建立的损耗最小组合表,得到该工况下电机损耗最小的励磁电流给定i
f_ref
与电枢电流给定i
p_ref
,具体为:
19.s2.2.1:若电励磁双凸极电机转速n在区间(ni,n
i+1
),电磁转矩参考值t
e_ref
在区间(t
ej
,t
ej+1
)之间,记转速区间步长为δn=n
i+1-ni;
20.s2.2.2:上述区间查表可得对应的输出共有(i
fi,j
,i
pi,j
)、(i
fi+1,j
,i
pi+1,j
)、(i
fi,j+1
,i
pi,j+1
)、(i
fi+1,j+1
,i
pi+1,j+1
);
21.s2.2.3:采用线性平均方法得到该工况下电励磁双凸极电机的励磁电流给定为i
f_ref
=i
fi,j
+(i
fi+1,j+1-i
fi,j
)
×
(n-ni)/δn,电枢电流给定为i
p_ref
=i
pi,j
+(i
pi+1,j+1-i
pi,j
)
×
(n-ni)/δn。
22.所述步骤s3中对励磁电流、电枢电流分别进行闭环控制,具体步骤如下:
23.s3.1:对励磁电流进行闭环控制,将励磁电流给定的参考值与实际励磁电流做差输入到比例积分调节器,输出作为励磁功率变换器左桥臂上管驱动信号的占空比,右桥臂下管常开,实现电机励磁电流控制;
24.s3.2:对电枢电流进行闭环控制,将电枢电流给定的参考值与实际电枢电流做差输入到比例积分调节器,调节器输出为主功率变换器驱动信号占空比,结合转子当前位置得到全桥变换器中功率器件的开关信号,三相全桥变换器采用三相三状态导通规律,每个功率管导通区间为120
°
电角度,每120
°
换相一次,根据转子位置,全桥变换器中的六个功率器件具体导通情况如下:
25.转子位于0
°
~120
°
区间,第一桥臂上管斩波控制、第三桥臂下管常通,导通相为a+c-;
26.转子位于120
°
~240
°
区间,第二桥臂上管斩波控制、第一桥臂下管常通,导通相为b+a-;
27.转子位于240
°
~360
°
区间,第三桥臂上管斩波控制、第二桥臂下管常通,导通相为c+b-。
28.有益效果:与现有技术相比,本发明的技术方案具有以下有益技术效果:
29.本发明提出的励磁电流与电枢电流协同优化控制方法,能够在宽转速负载工况下降低系统损耗,提高系统效率。
附图说明
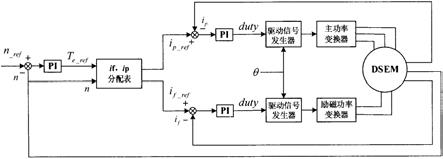
30.图1是本发明方法的系统控制框图;
31.图2是本发明的电励磁双凸极电机驱动系统结构图;
32.图3是本发明的12/8极电励磁双凸极电机截面图;
33.图4是本发明的电励磁双凸极电机三相自感曲线及通电规则图。
具体实施方式
34.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。其中,所描述的实施例是本发明一部分实施例,而不是全部的实施例。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。
35.实施例1
36.本发明方法的系统控制框图如图1所示。本发明基于的电励磁双凸极电机系统结构框图如图2所示,包括:电励磁双凸极电机、三相全桥主功率变换器、不对称半桥励磁功率变换器,电励磁双凸极电机三相电枢绕组与全桥主功率变换器相连,励磁绕组与不对称半桥励磁功率变换器相连。其中电励磁双凸极电机截面如图3所示。电励磁双凸极电机采用“三相三拍”通电方式时的三相自感曲线如图4所示。本发明方法具体包括如下步骤:
37.步骤s1:如图1所示,建立电励磁双凸极电机损耗计算模型,并仿真计算获得不同转速n、转矩te损耗最小的励磁电流if与电枢电流i
p
组合,具体如下:
38.步骤s1.1:建立包含铁损与铜损的电励磁双凸极电机的有限元损耗计算模型;
39.步骤s1.2:根据电机运行转速及负载转矩范围,分别在转速n1、n2...ni...nm下电磁转矩为t
e1
、t
e2
...t
ej
...t
ek
的m
×
k个工况下仿真计算得到m
×
k个损耗最小电机励磁电流if与电枢电流i
p
组合(i
f1,1
,i
p1,1
)、(i
f1,2
,i
p1,2
)...(i
fi,j
,i
pi,j
)...(i
fm,k
,i
pm,k
)。
40.步骤s2:如图1所示,系统转速外环输出作为转矩参考值t
e_ref
,结合电机当前转速,根据上述损耗组合,得到该工况下的励磁电流给定i
f_ref
电枢电流给定i
p_ref
,具体为:
41.步骤s2.1:将电机当前转速n与电机给定转速n_
ref
做差输入到比例积分调节器,调节器输出为转矩参考值t
e_ref
;
42.步骤s2.2:基于转矩参考值t
e_ref
与电机当前转速n,根据建立的损耗最小组合表,得到该工况下电机损耗最小的励磁电流给定i
f_ref
与电枢电流给定i
p_ref
,具体为:
43.步骤s2.2.1:若电励磁双凸极电机转速n在区间(ni,n
i+1
),转矩参考值t
e_ref
在区间(t
ej
,t
ej+1
)之间,记转速区间步长为δn=n
i+1-ni;
44.步骤s2.2.2:上述区间查表可得对应的输出共有(i
fi,j
,i
pi,j
)、(i
fi+1,j
,i
pi+1,j
)、(i
fi,j+1
,i
pi,j+1
)、(i
fi+1,j+1
,i
pi+1,j+1
);
45.步骤s2.2.3:采用线性平均方法得到励磁电流给定为i
f_ref
=i
fi,j
+(i
fi+1,j+1-i
fi,j
)
×
(n-ni)/δn,电枢电流给定为i
p_ref
=i
pi,j
+(i
pi+1,j+1-i
pi,j
)
×
(n-ni)/δn。
46.步骤s3:如图2所示,电励磁双凸极电机励磁绕组采用不对称半桥变换器驱动,采用单励磁电流闭环控制;电枢绕组采用全桥变换器驱动,根据励磁电流与电枢电流参考值、以及当前转子位置进行电流闭环控制,得到两个变换器中各功率器件的开关信号,具体为:
47.步骤s3.1:对励磁电流进行闭环控制,将励磁电流给定的参考值与实际励磁电流做差输入到比例积分调节器,输出作为励磁功率变换器左桥臂上管q7驱动信号的占空比,右桥臂下管q8常开,实现电机励磁电流控制;
48.步骤s3.2:对电枢电流进行闭环控制,将电枢电流给定的参考值与实际电枢电流做差输入到比例积分调节器,调节器输出为主功率变换器驱动信号占空比,结合转子当前位置得到全桥变换器中功率器件的开关信号,三相全桥变换器采用三相三状态导通规律,每个功率管导通区间为120
°
电角度,每120
°
换相一次,根据转子位置,全桥变换器中的六个功率器件具体导通情况如下:
49.转子位于0
°
~120
°
区间,第一桥臂上管q1斩波控制、第三桥臂下管q2常通,导通相为a+c-;
50.转子位于120
°
~240
°
区间,第二桥臂上管q3斩波控制、第一桥臂下管q4常通,导通相为b+a-;
51.转子位于240
°
~360
°
区间,第三桥臂上管q5斩波控制、第二桥臂下管q6常通,导通相为c+b-。
52.通过上述步骤s1-步骤s3即可实现励磁电流、电枢电流协同优化控制方法,使宽转速负载范围的电励磁双凸极电机的稳定运行,能够有效降低其运行损耗。
53.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构和方法并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1