一种电机和负载之间具有弹性元器件的驱动器的制作方法
1.本发明涉及驱动器技术领域,更具体为一种电机和负载之间具有弹性元器件的驱动器。
背景技术:
2.康复机器作为机器人技术与医工技术结合的产物,目标是实现替代/辅助康复治疗师,简化传统"一对一"的繁重的治疗过程,帮助病患重塑中枢神经系统。目前康复机构配备主要是功能较多、自动化程度较高的、多自由度的牵引式/悬挂式康复机器人,但近年来在此基础上技术升级的康复机器人开始增多。机器人在康复及疗养领域上有着巨大的潜力,这类系统不仅能够对行动障碍进行治疗,也能够作为社会与行为障碍的干预与治疗工具,包括自闭症类群、多动症等,未来还将朝着促进原居安老、推迟老年痴呆症的发生,通过陪护缓解老年人孤独的方向上进一步发展。
3.驱动器是康复机器的重要部件,但现有的驱动器多为刚性驱动器,使用起不自然,且造价成本高。因此,需要提供一种新的技术方案给予解决。
技术实现要素:
4.本发明的目的在于提供一种电机和负载之间具有弹性元器件的驱动器,解决了驱动器是康复机器的重要部件,但现有的驱动器多为刚性驱动器,使用起不自然,且造价成本高的问题。
5.为实现上述目的,本发明提供如下技术方案:一种电机和负载之间具有弹性元器件的驱动器,包括:电机本体,所述电机本体的侧面设置有安装板且安装板的侧面设置有柔性连接件,所述柔性连接件套接在电机本体的动力输出端,所述柔性连接件包括第一弹性板和第二弹性板且第一弹性板位于第二弹性板的内侧,所述柔性连接件的侧面设置有法兰盘且法兰盘的内部设置有固定螺栓,所述固定螺栓贯穿法兰盘与第一弹性板和第二弹性板之间固定连接,所述法兰盘的侧面设置有连接座且连接座的侧面设置有联轴器,所述电机本体的动力输出轴贯穿连接轴与联轴器之间相连接,所述法兰盘的表面设置有连接杆且连接杆和联轴器的侧面设置有固定板,所述联轴器侧面设置有驱动杆且驱动杆贯穿固定板,所述固定板的侧面设置有直线运动部和连接柱,所述连接柱和驱动杆的传媒安设置有连接板且连接柱的一端延伸至连接板外部。
6.作为本发明的一种优选实施方式,所述第一弹性板和第二弹性板的两侧均呈u型结构设置,所述第一弹性板和第二弹性板均设置有两组并呈十字型分布。
7.作为本发明的一种优选实施方式,所述固定螺栓贯穿第一弹性板和第二弹性板且固定螺栓的表面设置有第一螺母和第二螺母,所述第一螺母位于第二弹性板的内侧且第二螺母位于第一弹性板的内侧。
8.作为本发明的一种优选实施方式,所述第一弹性板和第二弹性板均采用弹性橡胶板制成。
9.作为本发明的一种优选实施方式,所述连接座的表面设置有安装部且安装部与联轴器之间固定连接。
10.作为本发明的一种优选实施方式,所述连接座的内部设置有卡块且卡块设置有若干组,若干组所述卡块之间形成半弧形卡槽且卡槽的内部设置有弹性部件,所述弹性部件呈圆柱形结构设置并与卡槽之间相互嵌合。
11.作为本发明的一种优选实施方式,所述驱动杆的表面设置有弹簧柱且弹簧柱连接固定板和连接板。
12.与现有技术相比,本发明的有益效果如下:
13.本发明在电机本体的侧面设置有安装板且安装板的侧面设置有柔性连接件,柔性连接件包括第一弹性板和第二弹性板,第一弹性板位于第二弹性板的内侧且第一弹性板和第二弹性板的两侧均呈u型结构设置,且第一弹性板和第二弹性板之间均呈十字型分布,柔性连接件套接在电机本体的动力输出轴表面,柔性连接件的侧面设置有法兰盘,第一弹性板和第二弹性板之间设置有固定螺栓且固定螺栓的表面设置有第一螺母和第二螺母,法兰盘、第一弹性板和第二弹性板均通过固定螺栓、第一螺母和第二螺母之间固定连接,柔性连接件可以有效补偿原动机与负载设备之间的轴心的偏移,同时还可以解决传动生产的振动冲击,柔性连接件轴向尺寸紧凑,不需润滑、无噪音、传递扭矩大,其制造成本低,安装维护简单,在法兰盘的表面设置有连接座且连接座的侧面设置有联轴器,电机本体的动力输出轴贯穿连接轴与联轴器之间相连接,在法兰盘的表面设置有连接杆且连接杆的侧面设置有安装板,安装板的侧面设置有直线运动部、驱动杆和连接柱,连接柱和驱动杆的侧面设置有连接板,在驱动杆的表面设置有弹簧柱,此种设置可以为驱动器提供内在的柔性和反驱性,可以在机器人和人体肢体之间起到缓冲作用,因此该驱动器具有很高的安全性,人机交互力可以通过弹簧柱的压缩量估计,而不需要额外的力矩传感器来测量,因此,驱动器的结构可以简化,成本降低,驱动器中的弹性元件可以储存/释放能量,因此相比刚性驱动器可以节省能力的消耗。
附图说明
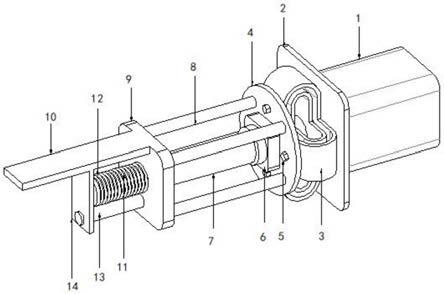
14.图1为本发明整体结构示意图;
15.图2为本发明侧视结构示意图;
16.图3为本发明连接座结构示意图。
17.图中:1、电机本体;2、安装板;3、柔性连接件;4、法兰盘;5、固定螺栓;6、连接座;7、联轴器;8、连接杆;9、安装板;10、直线运动部;11、驱动杆;12、弹簧柱;13、连接柱;14、连接板;15、第一弹性板;16、第二弹性板;17、第一螺母;18、第二螺母;19、安装部;20、卡块;21、卡槽;22、弹性部件。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参阅图1-图3,本发明提供一种技术方案:一种电机和负载之间具有弹性元器件的驱动器,包括:电机本体1,所述电机本体1的侧面设置有安装板2且安装板2的侧面设置有柔性连接件3,所述柔性连接件3套接在电机本体1的动力输出端,所述柔性连接件3包括第一弹性板15和第二弹性板16且第一弹性板15位于第二弹性板16的内侧,所述柔性连接件3的侧面设置有法兰盘4且法兰盘4的内部设置有固定螺栓5,所述固定螺栓5贯穿法兰盘4与第一弹性板15和第二弹性板16之间固定连接,所述法兰盘4的侧面设置有连接座6且连接座6的侧面设置有联轴器7,在电机本体1的侧面设置有安装板2且安装板2的侧面设置有柔性连接件3,柔性连接件3包括第一弹性板15和第二弹性板16,第一弹性板15位于第二弹性板16的内侧且第一弹性板15和第二弹性板16的两侧均呈u型结构设置,且第一弹性板15和第二弹性板16之间均呈十字型分布,柔性连接件3套接在电机本体1的动力输出轴表面,柔性连接件3的侧面设置有法兰盘4,第一弹性板15和第二弹性板16之间设置有固定螺栓5且固定螺栓5的表面设置有第一螺母17和第二螺母18,法兰盘4、第一弹性板15和第二弹性板16均通过固定螺栓5、第一螺母17和第二螺母18之间固定连接,柔性连接件3可以有效补偿原动机与负载设备之间的轴心的偏移,同时还可以解决传动生产的振动冲击,柔性连接件3轴向尺寸紧凑,不需润滑、无噪音、传递扭矩大,其制造成本低,安装维护简单,所述电机本体1的动力输出轴贯穿连接轴与联轴器7之间相连接,所述法兰盘4的表面设置有连接杆8且连接杆8和联轴器7的侧面设置有固定板9,所述联轴器7侧面设置有驱动杆11且驱动杆11贯穿固定板9,所述固定板9的侧面设置有直线运动部10和连接柱13,所述连接柱13和驱动杆11的传媒安设置有连接板14且连接柱13的一端延伸至连接板14外部,在法兰盘4的表面设置有连接杆8且连接杆8的侧面设置有安装板2,安装板2的侧面设置有直线运动部10、驱动杆11和连接柱13,连接柱13和驱动杆11的侧面设置有连接板14,在驱动杆11的表面设置有弹簧柱12,此种设置可以为驱动器提供内在的柔性和反驱性,可以在机器人和人体肢体之间起到缓冲作用,因此该驱动器具有很高的安全性,人机交互力可以通过弹簧柱12的压缩量估计,而不需要额外的力矩传感器来测量,因此,驱动器的结构可以简化,成本降低,驱动器中的弹性元件可以储存/释放能量,因此相比刚性驱动器可以节省能力的消耗。
20.进一步改进的,如图2所示:所述第一弹性板15和第二弹性板16的两侧均呈u型结构设置,所述第一弹性板15和第二弹性板16均设置有两组并呈十字型分布,弹性板的u型弯折处提供了良好的弹性势能。
21.进一步改进的,如图2所示:所述固定螺栓5贯穿第一弹性板15和第二弹性板16且固定螺栓5的表面设置有第一螺母17和第二螺母18,所述第一螺母17位于第二弹性板16的内侧且第二螺母18位于第一弹性板15的内侧,此种设置保证了第一弹性板15和第二弹性板16之间连接的稳定性。
22.进一步改进的,如图2所示:所述第一弹性板15和第二弹性板16均采用弹性橡胶板制成,橡胶板的弹性势能和柔性方面性能突出。
23.进一步改进的,如图3所示:所述连接座6的表面设置有安装部19且安装部19与联轴器7之间固定连接,此种设置方便连接座6与安装部19之间连接。
24.进一步改进的,如图3所示:所述连接座6的内部设置有卡块20且卡块20设置有若干组,若干组所述卡块20之间形成半弧形卡槽21且卡槽21的内部设置有弹性部件22,所述弹性部件22呈圆柱形结构设置并与卡槽21之间相互嵌合,此种设置保证了弹性部件22安装
的稳定性,同时保证电机本体1的动力输出轴有足够的偏移空间。
25.进一步改进的,如图2所示:所述驱动杆11的表面设置有弹簧柱12且弹簧柱12连接固定板9和连接板14,可以通过测量弹簧的压缩量估计,而不需要额外的力矩传感器来测量。
26.本发明在电机本体1的侧面设置有安装板2且安装板2的侧面设置有柔性连接件3,柔性连接件3包括第一弹性板15和第二弹性板16,第一弹性板15位于第二弹性板16的内侧且第一弹性板15和第二弹性板16的两侧均呈u型结构设置,且第一弹性板15和第二弹性板16之间均呈十字型分布,柔性连接件3套接在电机本体1的动力输出轴表面,柔性连接件3的侧面设置有法兰盘4,第一弹性板15和第二弹性板16之间设置有固定螺栓5且固定螺栓5的表面设置有第一螺母17和第二螺母18,法兰盘4、第一弹性板15和第二弹性板16均通过固定螺栓5、第一螺母17和第二螺母18之间固定连接,柔性连接件3可以有效补偿原动机与负载设备之间的轴心的偏移,同时还可以解决传动生产的振动冲击,柔性连接件3轴向尺寸紧凑,不需润滑、无噪音、传递扭矩大,其制造成本低,安装维护简单,在法兰盘4的表面设置有连接座6且连接座6的侧面设置有联轴器7,电机本体1的动力输出轴贯穿连接轴与联轴器7之间相连接,在法兰盘4的表面设置有连接杆8且连接杆8的侧面设置有安装板2,安装板2的侧面设置有直线运动部10、驱动杆11和连接柱13,连接柱13和驱动杆11的侧面设置有连接板14,在驱动杆11的表面设置有弹簧柱12,此种设置可以为驱动器提供内在的柔性和反驱性,可以在机器人和人体肢体之间起到缓冲作用,因此该驱动器具有很高的安全性,人机交互力可以通过弹簧柱12的压缩量估计,而不需要额外的力矩传感器来测量,因此,驱动器的结构可以简化,成本降低,驱动器中的弹性元件可以储存/释放能量,因此相比刚性驱动器可以节省能力的消耗。
27.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1