一种兔形块状贴片式单相直线超声电机定子及激励方法
1.本发明涉及精密驱动技术领域,具体是一种兔形块状贴片式单相直线超声电机定子及激励方法。
背景技术:
2.超声电机是技术上相对成熟的新一代电机,具有低速大转矩的特点,特别合用于直接驱动机器人的主动关节,不需减速器、丝杆等机构,减小了传动装置的占用空间和惯性质量,同时,它还具有响应速度快、无电磁干扰等特点,超声电机的上述特性有助于机器人的结构紧凑、控制精确和动作迅速,现有超声电机主要通过相位差为90
°
的双相交流激励产生椭圆形驱动轨迹来实现驱动,它需要同时激励出两个频率接近的正交工作模态,电机结构的设计和制造要求都比较高,驱动电路也比较复杂,稳定性和可靠性有待提高。
3.单相驱动超声电机相对于双相驱动而言发展较为滞后,到目前为止,单相直线超声电机主要存在以下问题,一是大部分电机只能实现单向驱动,如果要实现正反驱动需要改变定子的夹持角度,操作复杂,实用性差;二是部分能实现正反运动的电机定子以薄板件为主,呈扁平化结构,电机所占平面尺寸很大,不利于微型化,驱动力也较小。
4.例如类似申请公布号为cn 112383242 a专利中提到的一种带尾翼的薄板框架结构直线超声电机定子,虽然能实现正反向驱动,但其原理是通过相位差为90
°
的双相交流激励产生椭圆形驱动轨迹来实现驱动,需要同时激励出两个频率接近的正交工作模态,设计、制造和维持工作可靠性等方面都比较复杂;
5.类似申请公布号为cn 107742993 a专利中提到的单相激励型面内振动超声电机,虽然能实现正反向驱动,但基于面内模态的超声电机输出力较小,基本都在10n以下,有很大的应用局限,不适合小型机器人关节驱动的特殊应用场合;
6.类似申请公布号为cn 112542959 a的专利中提到一种单相激励双向运动的微型超声电机,虽然能实现正反向驱动,但该电机用两个安装在一条直线上的压电叠堆作为激励源,尺寸长,所占空间也相对较大,在压电叠堆尺寸不变的前提下不能进一步使电机微型化,也不适合需要矩形框架外形电机的应用场合,此外压电叠堆价格较贵,使用成本高。
7.《review of scientific instruments》在2018年第89卷085001页中提到的一种直线单相双向驱动超声电机,虽然电机通过巧妙的设计,在低频和高频两个工作模态下的切换实现电机运动的换向,但由于驱动足的法向振动分量小,只在一棱边产生斜直线而非整个驱动足的斜直线,导致驱动足在工作状态下需要身体倾斜,依靠驱动足的侧边进行驱动,当反向驱动时必须改变夹持的角度,这就使得该电机难以得到实际应用。另外该结构的限制使得电机的整体效率很低,要想增加电机驱动足的振幅只能通过增加电压来实现,大大增加了能量的损耗。
8.通过观察,发现兔子等大多数小型四肢哺乳动物高速奔跑时呈跳跃动作,利用频率快,强有力的后腿猛力一蹬,把身躯弹出,从而实现高速奔跑。受此启发,参考兔子几何外形和奔跑方式,借鉴兰杰文振子聚能器原理,发明了一种兔形块状贴片式单相直线超声电
机定子及激励方法,以解决上述背景技术中提出的问题。
技术实现要素:
9.本发明的目的在于提供一种兔形块状贴片式单相直线超声电机定子及激励方法,以解决上述背景技术中提出的问题。
10.为实现上述目的,本发明提供如下技术方案:一种兔形块状贴片式单相直线超声电机定子,包括矩形弹性体框架,所述矩形弹性体框架的一端开设有弹性槽,所述弹性槽由相连通的矩形槽和柱形槽组成;
11.所述矩形弹性体框架的底部偏右位置处设有一驱动足,且矩形弹性体框架的上侧左右两处开设有两个安装孔,所述矩形弹性体框架的上表面安装有第一压电陶瓷片,且矩形弹性体框架远离矩形槽的一端安装有第二压电陶瓷片,所述矩形弹性体框架的底部左侧安装有第三压电陶瓷片;
12.所述第一压电陶瓷片、第二压电陶瓷片以及第三压电陶瓷片均在其厚度方向极化,沿垂直于该厚度方向变形。
13.作为本发明更进一步的方案:两个所述安装孔均开设在振动节点处,用于安装电机定子。
14.作为本发明更进一步的方案:所述矩形弹性体框架有两种工作模态,分别为正向驱动的一阶面外弯曲振动模态和反向驱动的二阶面外弯曲振动模态。
15.作为本发明更进一步的方案:两种工作模态时,第一压电陶瓷片(1)或第三压电陶瓷片(3)在不参与激励工作时,不参与激励的压电陶瓷片会在压电正效应下产生交流电压,据此电压信号可以实时监测电机的运行状况。
16.作为本发明更进一步的方案:所述第一压电陶瓷片、第二压电陶瓷片以及第三压电陶瓷片与矩形弹性体框架之间均通过胶粘固定。
17.作为本发明更进一步的方案:一种兔形块状贴片式单相直线超声电机定子的激励方法,其特征在于,包括如下步骤:
18.s1:电机设置为单相电压激励,给第二压电陶瓷片和第一压电陶瓷片施加相同正弦交流电,此时电机正向驱动,第三压电陶瓷片悬空;
19.s2:给第二压电陶瓷片和第三压电陶瓷片施加相同正弦交流电,此时电机反向驱动,第一压电陶瓷片悬空;
20.s3:第一压电陶瓷片和第二压电陶瓷片、第二压电陶瓷片与第三压电陶瓷片极化方向相反,给第一压电陶瓷片和第二压电陶瓷片施加相同正弦交流电,如果第二压电陶瓷片与矩形弹性体框架的结合面向外凸,则第一压电陶瓷片与矩形弹性体框架的结合面向内凹,反之,如果第二压电陶瓷片与矩形弹性体框架的结合面向内凹,则第一压电陶瓷片与矩形弹性体框架的结合面向外凸;
21.此时第一压电陶瓷片和第二压电陶瓷片类似一对肌肉,一伸一缩激发起一阶面外弯曲振动模态,驱动电机正向运动,第二压电陶瓷片和第三压电陶瓷片类似另一对肌肉,一伸一缩激发起二阶面弯曲振动模态,驱动电机方向运动,进而通过分别施加激励电压实现电机双向驱动。
22.与现有技术相比,本发明的有益效果是:本发明采用兔形对模态的改进,使得激发
边变形量小,驱动足变形量大,形成较大的振速比,形成类似兰杰文振子的聚能器效果,减少了能量损耗,使电机驱动能量密度进一步提高;
23.类似兔子后腿的驱动足速度瞬心半径大,有较大法的向振动分量,无论正向模态还是反向模态,驱动足整体形成斜椭圆运动,可以在不改变定子约束姿态的前提下实现电机的正反向驱动,操作简单,实用性强;
24.外形为兔形块状,结构简单,尺寸小,制造成本低,电机驱动力大,并可进一步微型化设计;
25.在正向或反向驱动时,都有一片压电陶瓷片不参与激励,该压电陶瓷片在压电正效应下产生交流电压,该交流电压可以作为电机运行状况实时监测信号。
附图说明
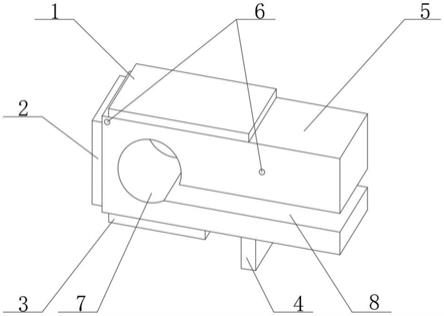
26.图1为一种兔形块状贴片式单相直线超声电机定子的结构示意图;
27.图2为一种兔形块状贴片式单相直线超声电机定子及激励方法中,一阶面外弯曲振动模态下正向驱动的一个工作周期运动示意图;
28.图3为一种兔形块状贴片式单相直线超声电机定子及激励方法中,二阶面外弯曲振动模态下反向驱动的一个工作周期运动示意图。
29.图中:1、第一压电陶瓷片;2、第二压电陶瓷片;3、第三压电陶瓷片;4、驱动足;5、矩形弹性体框架;6、安装孔;7、柱形槽;8、矩形槽。
具体实施方式
30.请参阅图1~3,本发明实施例中,一种兔形块状贴片式单相直线超声电机定子,包括矩形弹性体框架5,述矩形弹性体框架5的一端开设有弹性槽,弹性槽由相连通的矩形槽8和柱形槽7组成;
31.矩形弹性体框架5类似兔形,矩形弹性体框架5的偏右位置处设有一驱动足4,类似兔后腿,且矩形弹性体框架5的上侧左右两处开设有两个安装孔6,矩形弹性体框架5的上表面安装有第一压电陶瓷片1,且矩形弹性体框架5远离矩形槽8的一端安装有第二压电陶瓷片,矩形弹性体框架5的底部安装有第三压电陶瓷片3;
32.第一压电陶瓷片1、第二压电陶瓷片2以及第三压电陶瓷片3均在其厚度方向极化,沿垂直于该厚度方向变形。
33.进一步的,两个安装孔6均开设在振动节点处,用于安装电机定子。
34.进一步的,矩形弹性体框架5有两种工作模态,分别为正向驱动的一阶面外弯曲振动模态和反向驱动的二阶面外弯曲振动模态。
35.进一步的,两种工作模态时,第一压电陶瓷片1或第三压电陶瓷片3中不参与激励的压电陶瓷片在压电正效应下产生交流电压,据此电压信号实时监测电机的运行状况。
36.进一步的,第一压电陶瓷片1、第二压电陶瓷片2以及第三压电陶瓷片3与矩形弹性体框架5之间均通过胶粘固定。
37.进一步的,一种兔形块状贴片式单相直线超声电机定子的激励方法,包括如下步骤:
38.s1:电机设置为单相电压激励,给第二压电陶瓷片2和第一压电陶瓷片1施加相同
正弦交流电,此时电机正向驱动,第三压电陶瓷片3悬空;
39.s2:给第二压电陶瓷片2和第三压电陶瓷片3施加相同正弦交流电,此时电机反向驱动,第一压电陶瓷片1悬空;
40.s3:第一压电陶瓷片1和第二压电陶瓷片2、第二压电陶瓷片2与第三压电陶瓷片极化方向相反,给第一压电陶瓷片1和第二压电陶瓷片2施加相同正弦交流电,如果第二压电陶瓷片2与矩形弹性体框架5的结合面向外凸,则第一压电陶瓷片1与矩形弹性体框架5的结合面向内凹,反之,如果第二压电陶瓷片2与矩形弹性体框架5的结合面向内凹,则第一压电陶瓷片1与矩形弹性体框架5的结合面向外凸;
41.此时第一压电陶瓷片1和第二压电陶瓷片2类似一对肌肉,一伸一缩激发起一阶面外弯曲振动模态,该模态下(参阅说明书附图2):其中节点o位于右下侧,驱动足4上质点p绕振动节点o作斜向右下方的运动,进而驱动动子向右移动,电机的这种运动方式可以理解为电机以“顶”的方式驱动动子,动子运动方向向右,称为正向驱动;
42.第二压电陶瓷片2和第三压电陶瓷片3类似另一对肌肉,一伸一缩激发起二阶面弯曲振动模态,该模态下(参阅说明书附图3):驱动足4上p点绕驱动足4左上方振动节点o斜向左下方运动,进而驱动动子向左移动。电机的这种运动方式可以理解为电机以“勾”的方式驱动动子,动子运动方向向左,称为反向驱动;
43.进而通过分别施加激励电压实现电机双向驱动。
44.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1