一种无速度传感器控制的永磁同步电机的制作方法
1.本发明涉及永磁同步电机技术领域,特别涉及一种无速度传感器控制的永磁同步电机。
背景技术:
2.随着船舶动力系统的发展,永磁同步电机在船舶电力拖动领域中的使用日益广泛。受制于安装环境条件等因素的限制,旋转编码器及光电编码器等速度测量装置的安装难度较大,因此舰船用永磁同步电机多采用无速度传感器的控制方式。在低频段一般使用速度开环的i/f控制方法,在中高频段一般使用基于滑模观测器的矢量定向控制方法。在低频段至中高频段的切换前后,两种控制方法的不同导致电机的驱动电压产生突变,电机出现抖动、卡转等现象。
技术实现要素:
3.本发明提出一种能够在低转速和中高转速之间实现平滑切换的无速度传感器控制的永磁同步电机。
4.本发明旨在提供一种无速度传感器控制的永磁同步电机,其特征在于,所述无速度传感器控制的永磁同步电机包括电机本体、控制模块和运算模块;
5.所述电机本体是不设有编码器的永磁同步电机;所述控制模块与电机本体电连接,用于对电机本体发送控制指令,实现对永磁同步电机的控制;所述运算模块用于通过对各项参数进行计算,生成最终控制模块输出的控制指令;
6.在低速运行阶段中,所述控制模块向电机本体发出预设的电机电流指令值以及初始角度值,运算模块使用当前角度值和转速生成坐标系,将预设的电机电流指令值与采样的电机电流值相减得到的差值进行闭环控制运算,获得在当前生成的坐标系下的电机控制电压,将pi运算得到的结果在生成的坐标系下进行反park变换计算,计算结果作为电机的实际控制电压,由控制模块对电机本体进行调控;
7.在中高速运行阶段中,所述运算模块将电机控制目标转速与观测转速的差值进行pi运算,得到的结果作为计算电机电流指令值,计算指令电机电流值与采样电机电流指令相减得到的差值进行pi运算,将pi运算得到的结果在观测坐标系下进行park反变换计算,计算结果作为电机的控制电压,由控制模块对电机本体进行调控;
8.在低速控制转切换至中高速控制的过程中,运算模块将低速运行阶段中生成的控制电压在滑模观测坐标系下进行反park变换计算,作为切换后第一个控制周期的电机电压控制指令;运算模块将低速控制中的预设电机电流指令值在生成的坐标系下进行park反变换计算,并在观测坐标系下进行park正变换,得到预设指令电机电流值在观测坐标系下的d轴分量和q轴分量,将d轴分量作为切换后的d轴计算指令电机电流值,并使其在1秒内衰减到零;将得到的q轴分量作为切换后的q轴计算指令电机电流值。
9.最后,运算模块将d轴分量作为切换后的d轴计算指令电机电流值,并使其在1秒内
衰减到零;将得到的q轴分量作为切换后的q轴计算指令电机电流值。
10.更进一步地,所述无速度传感器控制的永磁同步电机还包括滑模观测器和位置跟踪器,所述滑模观测器用于进行角度观测并生成观测坐标系,所述位置跟踪器用于获取电机观测转速;
11.所述滑模观测器的第一参数k,根据当前的电机观测速度,计算滑模观测器第二参数m,使第二参数m与第一参数k成正比;
12.通过传感器采样得到的电机电流,将电流进行clark变换,得到当前的两相静止坐标系下的电机的电流和电压;
13.根据第二参数m,第一参数k以及两相静止坐标系下的电机的电流和电压,通过滑模观测器状态方程计算出两相静止坐标系下的扩展反电动势,并将所有状态变量进行更新;
14.将所述扩展反电动势和输入位置跟踪器进行计算,得到电机观测转速,对观测转速积分得到电机观测角度,将该观测角度带入全阶滑模观测器的状态空间方程,并重复进行计算迭代,最终电机观测转速和角度将收敛到实际转速和角度。
15.更进一步地,所述第一参数k必须大于0.5倍扩展反电动势的最大值,即:
[0016][0017]
其中,e
α
和e
β
分别表示电机在两相静止坐标系下的扩展反电动势。
[0018]
更进一步地,所述位置跟踪器模型为:
[0019][0020]
其中,表示电机观测转速,k
p
和ki表示位置跟踪器的系数,和表示两相静止坐标系下的扩展反电动势。
[0021]
本发明达到的有益效果是:
[0022]
本发明提供永磁同步电机采用i/f控制转到矢量控制的切换方案,使得电机在全频段范围内有更为平滑的调速过程。
[0023]
本发明提供的永磁同步电机通过对全阶滑模观测器的状态空间方程中的第一参数m和第二参数k的取值进行优化,保证了滑模观测器在全转速范围内一致的收敛特性。而在现有技术中,变频器的m、k是固定的,这导致滑模观测器的收敛特性会随着电机转速的变化而变化。
附图说明
[0024]
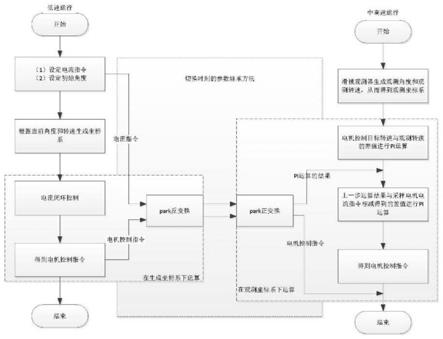
图1是本发明实施例提供的一种无速度传感器控制的永磁同步电机的控制示意图。
具体实施方式
[0025]
下面结合附图对本发明的技术方案进行更详细的说明,本发明包括但不仅限于下
述实施例。
[0026]
如附图1所示,本发明提供了一种无速度传感器控制的永磁同步电机,该无速度传感器控制的永磁同步电机在低速阶段采用速度开环的i/f控制,在中高速阶段采用基于滑模观测器的矢量定向控制,在低速阶段和中高速阶段控制方法切换时过程中,采用参数继承的方式实现两种控制方法的平滑过渡。
[0027]
该无速度传感器控制的永磁同步电机包括电机本体、控制模块、滑模观测器、位置跟踪器和运算模块。电机本体采用不设置编码器的永磁同步电机。控制模块与电机本体电连接,用于对电机本体发送控制指令,实现对永磁同步电机的控制。位置跟踪器用于获取电机观测转速。运算模块用于通过对各项参数进行计算,生成最终控制模块输出的控制指令。
[0028]
电机本体在启动后0到7.5hz的低速运行阶段中,采用速度开环的i/f控制。首先,控制模块向电机本体发出预设的电机电流指令值以及初始角度值,预设电流值为5a,预设角度为0度。
[0029]
其次,运算模块将电机的目标转速进行时间积分,再加上初始角度值,得到当前角度值,使用当前角度值和转速生成坐标系。
[0030]
再次,运算模块将预设的电机电流指令值与采样的电机电流值相减得到的差值进行闭环控制运算,获得在当前生成的坐标系下的电机控制电压。
[0031]
最后,运算模块将pi运算得到的结果在生成的坐标系下进行park反变换计算,计算结果作为电机的实际控制电压,由控制模块对电机本体进行调控。
[0032]
电机本体运行到7.5hz至50hz的中高速运行阶段中,采用基于滑模观测器的矢量定向控制。
[0033]
首先,运算模块将电机控制目标转速与观测转速的差值进行pi运算,得到的结果作为计算电机电流指令值。
[0034]
其次,运算模块计算指令电机电流值与采样电机电流指令相减得到的差值进行pi运算。
[0035]
最后,运算模块将pi运算得到的结果在观测坐标系下进行park反变换计算,计算结果作为电机的控制电压,由控制模块对电机本体进行调控。
[0036]
具体的,观测坐标系由滑模观测器进行角度观测并获得:
[0037]
首先,选取滑模观测器的第一参数k,为了保证滑模观测器的收敛性,第一参数k必须大于0.5倍扩展反电动势的最大值,即
[0038][0039]
其中,e
α
和e
β
为电机在两相静止坐标系下的扩展反电动势。
[0040]
优选地,k取300。
[0041]
根据当前的电机观测速度,计算滑模观测器第二参数m,使第二参数m与第一参数k成正比,比例系数取电机d轴电感与电机转速的乘积。
[0042]
其次,通过传感器采样得到的电机电流,运算模块将电流进行clark变换,得到当前的两相静止坐标系下的电机的电流和电压。
[0043]
再次,运算模块根据计算得到的第二参数m、第一参数k以及两相静止坐标系下的电机的电流和电压,带入到下面的滑模观测器状态方程,计算出两相静止坐标系下的扩展
反电动势,并将所有状态变量进行更新。
[0044][0045]
其中,和表示两相静止坐标系下的观测电流,和表示两相静止坐标系下的扩展反电动势,r表示电机电阻,ld表示电机d轴电感,lq表示电机q轴电感,表示电机观测转速,u
α
和u
β
表示两相静止坐标系下的电机控制电压,i
α
和i
β
表示两相静止坐标系下的电机电流。
[0046]
最后,运算模块将得到的扩展反电动势和输入下式所示的位置跟踪器进行计算,得到电机观测转速,对观测转速积分得到电机观测角度。将该观测角度带入全阶滑模观测器的状态空间方程,并重复进行计算迭代,最终电机观测转速和角度将收敛到实际转速和角度。
[0047][0048]
其中,表示电机观测转速,k
p
和ki表示位置跟踪器的系数,和表示两相静止坐标系下的扩展反电动势。
[0049]
通过滑模观测器计算得到观测转速和观测角度,并通过观测角度建立观测坐标系。
[0050]
在一种实施方式中,对滑模观测器进行进一步分析,当电机电流观测值收敛至实际值,扩展反电动势误差的动态方程化为标准二阶形式,自然频率和阻尼比分别表示为:
[0051][0052]
[0053]
其中,ld表示电机d轴电感,表示电机观测转速。
[0054]
本实施方式中设计滑模观测器的阻尼比为0.707。则可以得到
[0055][0056]
本实施方式让滑模观测器的参数m、k随电机转速自适应地变化,始终保持m与k的比值等于电机d轴电感与电机转速的乘积,保证了滑模观测器在全转速范围内一致的收敛特性。
[0057]
在低速控制转切换至中高速控制的过程中,采用参数继承的方式实现两种控制方法的平滑过渡。
[0058]
首先,运算模块将低速运行阶段中生成的控制电压在滑模观测坐标系下进行反park变换计算,计算得到的结果作为切换后第一个控制周期的电机电压控制指令。
[0059]
其次,运算模块将低速控制方法的预设电机电流指令值在生成的坐标系下进行park反变换计算。
[0060]
再次,运算模块将预设电机电流指令值park反变换得到的结果在观测坐标系下进行park正变换,得到预设指令电机电流值在观测坐标系下的d轴分量和q轴分量。
[0061]
最后,运算模块将d轴分量作为切换后的d轴计算指令电机电流值,并使其在1秒内衰减到零;将得到的q轴分量作为切换后的q轴计算指令电机电流值。
[0062]
切换前后的预设指令电机电流值继承到计算指令电机电流值,电机电压控制指令也不会发生瞬间的突变,使切换过程平滑,不会引起电机的抖动。
[0063]
本发明不仅局限于上述具体实施方式,本领域一般技术人员根据实施例和附图公开内容,可以采用其它多种具体实施方式实施本发明,因此,凡是采用本发明的设计结构和思路,做一些简单的变换或更改的设计,都落入本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1