基于扰动补偿的PMSM伺服系统的快速有限时间复合控制方法
基于扰动补偿的pmsm伺服系统的快速有限时间复合控制方法
技术领域
1.本发明涉及高精度伺服控制系统领域,尤其涉及一种基于扰动补偿的永磁同步电机(pmsm)伺服系统的快速有限时间复合控制方法。
背景技术:
2.永磁同步电机具有结构简单、功率因数高、气隙磁通密度高、结构紧凑、损耗小、调速范围广等特点,与其他交流电机相比具有明显的优势,在机器人、精密雷达、航空航天、数控机床等对电机性能、控制精度要求越来越高的领域,得到了广泛的应用。永磁同步电动机系统是一个多变量、非线性和强耦合的非线性系统,其在实际应用中总是存在许多扰动,这些扰动可能包括摩擦力矩、转矩波动、未建模动态和负载变化,这也导致了其控制器的设计不是一件容易的任务。如果控制器没有足够的能力消除这些扰动的影响,就会造成系统性能的下降,无法实现高性能的伺服控制。
3.一个提高系统的抗扰能力的方法,是采用干扰观测器对扰动进行估计,并在控制律中进行前馈补偿。针对于干扰观测器的设计,国内外学者进行了大量的研究。文献“谢传林,曾岳南,王发良,等.基于扰动补偿的pmsm转速环自抗扰控制器设计[j].微特电机,2017,45(12):53-56.”设计了扩张状态观测器(eso),观测和补偿pmsm系统在运行过程中存在的集总扰动。然而eso仅能渐近无偏地估计常值干扰或扰动的一阶导数趋于0形式的干扰。文献“a.wu,g.duan.design of generalized pi observers for descriptor linear systems.ieee transactions on circuits and systems i:regular papers[j],2006,53(12):2828-2837”设计了广义比例积分观测器(gpio)估计扰动,其不仅能准确地估计出一阶导数随时间趋于0的扰动,而且能准确地估计出高阶导数趋于0的扰动(即具有时间序列多项式形式的扰动)。然而其对扰动的估计只能实现渐近收敛,收敛速度较慢。
[0004]
从反馈设计的角度来看,也可以采用一些反馈控制方法来提高系统的抗扰能力。有限时间控制方法就是这样一种有效的非线性控制方法。文献“陈哲,王逸衍,刘春强,等.永磁同步电机伺服系统的复合有限时间控制[j].微电机,2019,53(3):22-25.”设计了基于齐次性方法的有限时间复合控制策略。与传统的渐近稳定系统相比,有限时间稳定系统可以保证系统在平衡点附近具有更好的收敛性能,同时也具有较好的抗扰能力。然而该算法只有在平衡点附近即小偏差工况范围内才能保证有较大的控制增益,实现快速的收敛特性。在大偏差的工况下,如系统的上升阶段,控制增益往往很小,会导致系统上升时间变慢,即无法实现大偏差的快速响应。
技术实现要素:
[0005]
本发明的目的是提供一种基于扰动补偿的永磁同步电机伺服系统的快速有限时间复合控制方法,该方法不仅可以实现系统的有限时间收敛,还可以同时兼顾大偏差下的快速响应和小偏差下的稳态波动,提高了在系统在大偏差工况下的控制增益,解决了上升速度慢的缺点,即实现系统在大偏差工况下的快速响应。
[0006]
为解决以上技术问题,本发明的技术方案为:基于扰动补偿的pmsm伺服系统的快速有限时间复合控制方法,该方法首先通过有限时间干扰观测器对伺服系统的集总扰动进行估计,并将扰动估计值进行前馈补偿;同时,将转速参考信号的导数进行前馈补偿;最后,得到了一种基于扰动补偿的快速有限时间复合控制律;将其作为快速有限时间复合速度控制器,以实现永磁同步电机伺服系统在扰动影响下的控制。
[0007]
优选地,所述复合控制方法,具体为:
[0008]
步骤1:设定电机转速参考信号ω
*
,采集永磁同步电机伺服系统的实际转速反馈信号ω;
[0009]
步骤2:通过有限时间干扰观测器ftdo计算系统扰动估计值z0;
[0010]
所述有限时间干扰观测器ftdo的建立方法为:
[0011][0012]
其中,ω是电机实际转速,u为快速有限时间复合控制器的输出,li,ri为观测器的增益和幂值,ri=1+iδ,j是电机和负载的总的等效扰动惯量;是ω的估计值,sign(
·
)为符号函数,z0是系统扰动d(t)的估计值;zj是d(t)的j阶导数的估计值,j=1,...,n;k
t
=3n
p
ψf/2,其中,n
p
为极对数,ψf为转子上永久磁体产生的磁势;
[0013]
步骤3:通过快速有限时间复合控制器fftc计算控制器的输出控制量;所述快速有限时间复合控制器fftc的控制律计算方法为:
[0014][0015]
其中,u为快速有限时间复合控制器的输出,j表示电机和负载的总的等效扰动惯量,k
t
=3n
p
ψf/2,其中n
p
为极对数,ψf为转子上永久磁体产生的磁势;表示对设定转速参考信号ω
*
进行求导得到的前馈补偿信号,k
p1
>0、k
p2
>0、0<α1<1<α2,sig
α
(ω
*-ω)=sign(ω
*-ω)|ω
*-ω|
α
,sign(
·
)为符号函数;z0表示ftdo计算的系统扰动估计值;
[0016]
步骤4:根据快速有限时间复合控制器fftc的输出对永磁同步电机伺服系统进行控制。
[0017]
优选地,永磁同步电机伺服系统的被控系统模型为:
[0018][0019]
其中:ud,uq为定子绕组d、q轴电压,id,iq为d、q轴的定子电流,j为转动惯量,b为粘滞摩擦系数,t
l
为负载转矩,ω为电机转子机械角速度,l为定子电感,rs为定子电阻,k
t
=3n
p
ψf/2,n
p
为极对数,ψf为转子上永久磁体产生的磁势。
[0020]
优选地,步骤4具体为:
[0021]
步骤4.1:将快速有限时间复合控制器输出的控制量作为q轴电流控制器的设定信号;设定作为d轴电流控制器的设定信号;将采集到的电机电流信号进行clarke变换和park变换运算,以得到dq坐标系下的电流值id和iq,分别将id,iq作为d轴电流控制器和q轴电流控制器的反馈信号,经d轴电流控制器和q轴电流控制器的控制作用,得到dq轴的电流控制器的输出ud和uq;
[0022]
步骤4.2:对dq轴电流控制器的输出ud和uq进行park逆变换,得到αβ坐标系下定子相电压的参考值u
α
和u
β
;
[0023]
步骤4.3:根据u
α
和u
β
利用空间矢量脉宽调制技术产生pwm控制信号;
[0024]
步骤4.4:由pwm控制信号控制可控开关器件igbt,逆变出所需的三相交流电驱动电机运转,得到电机实际转速。
[0025]
优选地,所述永磁同步电机伺服系统中,采用光电编码器采集pmsm伺服电机的转速信号,采用霍尔电流传感器采集电机的电流信号。
[0026]
本发明具有如下有益效果:
[0027]
一、本发明采用了有限时间干扰观测器(ftdo),可以实现对扰动有限时间估计。相比于传统的广义比例积分观测器(gpio)只能渐近地估计干扰,使用ftdo,扰动的观测误差收敛速度更快,对扰动的补偿效果更好;
[0028]
二、本发明设计了快速有限时间复合控制,即在基于齐次性方法的有限时间控制的基础上进行了改进,叠加了一个幂值α2大于1的项,该项提高了在系统在大偏差工况下的控制增益,解决了传统有限时间控制器上升速度慢的缺点。具体原理是:当系统处于大偏差工况时,大幂值项起主要作用,提供较大的增益,使闭环系统具有快速的响应性能。当系统状态趋近于稳态时,控制律中的小幂值项起主要作用,提供较大的增益,可提高系统在平衡点附近的响应性能和稳态精度。其同时兼顾了大偏差下的快速响应和小偏差下的稳态波动,提高了在系统在大偏差工况下的控制增益,解决了上升速度慢的缺点,即实现系统在大偏差工况下的快速响应,且控制算法简单,易于实现。
附图说明
[0029]
图1为本发明基于扰动补偿的永磁同步电机伺服系统的快速有限时间复合控制方法流程图;
[0030]
图2为本发明实施例的基于矢量控制的永磁同步电机伺服系统框图;
[0031]
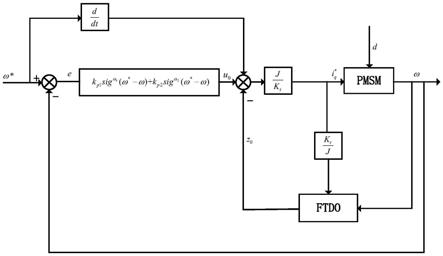
图3为本发明实施例基于扰动补偿的永磁同步电机伺服系统的快速有限时间复合控制器结构框图;
[0032]
图4为本发明实施例伺服系统的控制流程图。
具体实施方式
[0033]
为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本发明作进一步详细说明。
[0034]
请参考图1至图4,本发明为一种基于扰动补偿的永磁同步电机伺服系统的快速有限时间复合控制方法,该方法首先通过有限时间干扰观测器对伺服系统的集总扰动进行估计,并将扰动估计值进行前馈补偿;同时,将转速参考信号的导数进行前馈补偿;最后,得到了一种基于扰动补偿的快速有限时间复合控制律,将其作为快速有限时间复合速度控制器,以实现永磁同步电机伺服系统在扰动影响下的控制。步骤具体为:
[0035]
步骤1:建立永磁同步电机伺服系统的被控系统模型;设定电机转速参考信号ω
*
,采集永磁同步电机伺服系统的实际转速反馈信号ω;
[0036]
本实施例中,永磁同步电机伺服系统的被控系统模型为:
[0037][0038]
其中:ud,uq为定子绕组d、q轴电压,id,iq为d、q轴的定子电流,j为转动惯量,b为粘滞摩擦系数,t
l
为负载转矩,ω为电机转子机械角速度,l为定子电感,rs为定子电阻,k
t
=3n
p
ψf/2,n
p
为极对数,ψf为转子上永久磁体产生的磁势。
[0039]
步骤2:通过有限时间干扰观测器ftdo计算系统扰动估计值z0;
[0040]
有限时间干扰观测器ftdo的建立方法为:
[0041][0042]
其中,ω是电机实际转速,u为快速有限时间复合控制器的输出,li,ri为观测器的
增益和幂值,ri=1+iδ,j是电机和负载的总的等效扰动惯量,是ω的估计值,sign(
·
)为符号函数,z0是系统扰动d(t)的估计值;zj是d(t)的j阶导数的估计值,j=1,...,n;k
t
=3n
p
ψf/2,其中,n
p
为极对数,ψf为转子上永久磁体产生的磁势。
[0043]
步骤3:通过快速有限时间复合控制器fftc计算控制器的输出控制量;快速有限时间复合控制器fftc的控制律计算方法为:
[0044][0045]
其中,u为快速有限时间复合控制器的输出,j表示电机和负载的总的等效扰动惯量,k
t
=3n
p
ψf/2,其中n
p
为极对数,ψf为转子上永久磁体产生的磁势;表示对设定转速参考信号ω
*
进行求导得到的前馈补偿信号,k
p1
>0、k
p2
>0、0<α1<1<α2,sig
α
(ω
*-ω)=sign(ω
*-ω)|ω
*-ω|
α
,sign(
·
)为符号函数;z0表示ftdo计算的系统扰动估计值;
[0046]
参阅图3,图3示出了基于有限时间观测器和快速有限时间控制器相结合的快速有限时间复合控制器fftc,计算方法具体为:系统给定转速的参考信号ω
*
,经求导后,得到控制器的前馈补偿信号利用控制器的输出信号和实际转速的反馈信号ω,并通过有限时间观测器ftdo得到干扰的估计值z0。再将ω
*
与编码器采集的实际转速ω做差得到转速误差,即e=ω
*-ω。转速误差e在快速有限时间控制的作用下,加上前馈补偿信号减掉扰动估计值z0,最后乘以比例即得到整个复合控制器的控制输出
[0047]
步骤4:根据快速有限时间复合控制器fftc的输出对永磁同步电机伺服系统进行控制,结合图2和图4,步骤4具体为:
[0048]
步骤4.1:将快速有限时间复合控制器输出的控制量作为q轴电流控制器的设定信号;设定作为d轴电流控制器的设定信号;将采集到的电机电流信号进行clarke变换和park变换运算,以得到dq坐标系下的电流值id和iq,分别将id,iq作为d轴电流控制器和q轴电流控制器的反馈信号,经d轴电流控制器和q轴电流控制器的控制作用,得到dq轴的电流控制器的输出ud和uq;
[0049]
步骤4.2:对dq轴电流控制器的输出ud和uq进行park逆变换,得到αβ坐标系下定子相电压的参考值u
α
和u
β
;
[0050]
步骤4.3:根据u
α
和u
β
利用空间矢量脉宽调制技术产生pwm控制信号;
[0051]
步骤4.4:由pwm控制信号控制可控开关器件igbt,逆变出所需的三相交流电驱动电机运转,得到电机实际转速。
[0052]
本实施例中,利用霍尔传感器用于采集两路电流信号ia,ib,光电编码器在电机内部用于采集pmsm伺服电机的转速信号;本实施例的实验平台采用基于埃斯顿公司的em3a-04ala211型号电机和ed3s伺服驱动器实现,编程语言为c语言。
[0053]
本发明未涉及部分均与现有技术相同或采用现有技术加以实现。
[0054]
以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1