一种导轨与滑块间的曲柄锁闭装置的制作方法
1.本实用新型公开了一种导轨与滑块间的曲柄锁闭装置,属于机器人领域。
背景技术:
2.随着人类科技的不断进步,机器人已越来越频繁地出现在人们日常生活和工作中,比如目前市场上常见的有扫地机器人、搬运机器人以及配送机器人等。随着智能化程度的不断提高,这类机器人不但可以完全自主地完成工作,而且能够在电量不足时自动返回充电,全程无需人工干预,从而达到完全自动化的工作流程。其中,有一类机器人,其自动充电时需自动驶入预设的轨道,然后在轨道的末端设置有充电接口,通过插接口与该充电接口结合实现自动充电;但是这类机器人停留在轨道上充电时,若仅仅依靠插接口与充电接口结合力难以保持机器人固定地停留在轨道上进行充电,特别是在受到外界碰撞等干扰时容易造成插接口与充电接口之间脱开,从而中断充电甚至引起故障损坏,因此有必要设计一种能够在机器人充电时将机器人固定在轨道上不动的结构,以确保充电的可靠性。
技术实现要素:
3.本实用新型提供了一种导轨与滑块间的曲柄锁闭装置,稳定性好,可应用在机器人充电时对轨道上的机器人进行固定,以确保充电的可靠性。
4.本实用新型的一方面涉及一种导轨与滑块间的曲柄锁闭装置,包括导轨和滑块,所述滑块设于所述导轨的上侧并可滑动,还包括锁臂、弹性装置、推杆、摆臂和驱动装置,所述导轨上侧正对所述滑块的位置设有缺口,所述滑块下侧正对所述缺口的位置设有凹设的卡口,所述锁臂的中部铰接于所述缺口一侧的导轨上,所述弹性装置作用于所述锁臂上,使该锁臂一端从缺口处伸出至导轨上方的所述卡口中,该锁臂另一端伸至所述导轨下侧,所述驱动装置设于所述导轨下侧,所述摆臂连接于所述驱动装置并在该驱动装置的带动下可转动,所述推杆的一端连接于所述摆臂活动的一端,推杆的轴向设有腰形槽,所述推杆通过一固定轴穿入腰形槽中支撑于所述锁臂下端的旁侧。
5.进一步地,所述弹性装置设为设为扭簧,所述扭簧套设于所述锁臂铰接在导轨上的铰接轴上。
6.进一步地,所述驱动装置设为舵机,所述摆臂的一端连接于所述舵机的输出轴上。
7.进一步地,所述锁臂的中部设有第一转折部和第二转折部,其铰接的位置位于第一转折部与第二转折部之间,其上端自第一转折部倾斜向上延伸,去下端自第二转折部倾斜向下延伸。
8.进一步地,还包括限位块,所述限位块设于所述导轨下侧位于推杆中部的位置,限位块上设有限位槽,所述固定轴设于所述限位槽中,所述推杆穿过所述限位槽,且推杆的两端分别从限位槽两端伸出。
9.进一步地,还包括固定框,所述固定框包覆于所述舵机的外周,并通过螺丝固定于所述导轨下侧。
10.进一步地,所述锁臂的下端设有增宽部,所述增宽部与所述推杆的位置相正对。
11.本实用新型的有益效果如下:
12.本实用新型的一种导轨与滑块间的曲柄锁闭装置,当驱动装置带动所述推杆沿背向锁臂的方向移动,使推杆与锁臂下端脱离时,锁臂在弹性装置弹性力的作用下,其上端从缺口处伸出至导轨上方的所述卡口中,从而卡住滑块使其固定在导轨上不动;当驱动装置带动所述推杆沿朝向锁臂的方向移动,使推杆与锁臂下端接触并推动锁臂时,产生向外推锁臂的作用力,此时锁臂在推力作用下压缩弹性装置,其上端向下移动,直到移出卡口并进入到缺口中,此时锁臂未对滑块产生卡住效果,滑块可在导轨上滑动。本实用新型稳定性好,可应用在机器人充电时对轨道上的机器人进行固定,以确保充电的可靠性。
附图说明
13.图1为本实用新型所述的导轨与滑块间的曲柄锁闭装置的主视图;
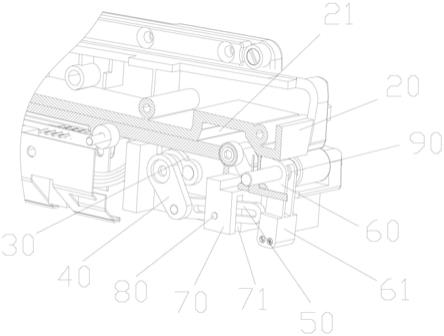
14.图2为本实用新型所述的导轨与滑块间的曲柄锁闭装置去除滑块时的立体图;
15.图3为本实用新型所述的导轨与滑块间的曲柄锁闭装置的局部剖视立体图;
16.图4为本实用新型所述的导轨与滑块间的曲柄锁闭装置的锁臂的主视图。
17.各部件名称及其标号
18.10-导轨;
19.20-滑块;
20.30-舵机;
21.40-摆臂;
22.50-推杆;
23.60-锁臂;
24.70-限位块;
25.80-固定轴;
26.90-扭簧;
27.11-缺口;
28.21-卡口;
29.31-固定框;
30.51-腰形槽;
31.61-增大部;
32.62-第一转折部;
33.63-第二转折部;
34.71-限位槽。
具体实施方式
35.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
36.实施例
37.请参照附图1
‑
4所示,本实用新型的实施例公开一种导轨与滑块间的曲柄锁闭装
置,包括导轨10和滑块20,所述滑块20设于所述导轨10的上侧并可滑动。还包括锁臂60、弹性装置、推杆50、摆臂 40和驱动装置,所述导轨10上侧正对所述滑块20的位置设有缺口 11,所述滑块20下侧正对所述缺口11的位置设有凹设的卡口12,所述锁臂60的中部铰接于所述缺口11一侧的导轨10上,所述弹性装置作用于所述锁臂60上,使该锁臂60一端从缺口11处伸出至导轨10上方的所述卡口12中,该锁臂60另一端伸至所述导轨10下侧,所述驱动装置设于所述导轨10下侧,所述摆臂40连接于所述驱动装置并在该驱动装置的带动下可转动,所述推杆50的一端连接于所述摆臂40活动的一端,推杆50的轴向设有腰形槽51,所述推杆50通过一固定轴80穿入腰形槽51中支撑于所述锁臂60下端的旁侧。当驱动装置带动所述推杆50沿背向锁臂60的方向移动,使推杆50与锁臂60下端脱离时,锁臂60在弹性装置弹性力的作用下,其上端从缺口11处伸出至导轨10上方的所述卡口12中,从而卡住滑块20使其固定在导轨10上不动;当驱动装置带动所述推杆50沿朝向锁臂 60的方向移动,使推杆50与锁臂60下端接触并推动锁臂60时,产生向外推锁臂60的作用力,此时锁臂60在推力作用下压缩弹性装置,其上端向下移动,直到移出卡口12并进入到缺口11中,此时锁臂 60未对滑块20产生卡住效果,滑块20可在导轨10上滑动。可以理解的是,上述滑块20可以是机器人上的某一部分,因此技术人员通过简单转换即可将本实用新型应用在机器人充电时对轨道上的机器人进行固定,以确保充电的可靠性。
38.可以理解的是,本实用新型采用推杆50与摆臂40组成的曲柄机构,直接推动锁臂60即可实现解锁,而在锁定时推杆50与摆臂40 是处于松开状态的,锁臂60依靠的是弹性装置的弹力保持着向上凸起的锁定位置。由于推杆50与摆臂40是在驱动装置的驱动下产生运动的,这类曲柄机构不容易出现卡死等现象,因此稳定性好,能够有效降低因机构卡死造成无法解锁的情况发生。
39.所述驱动装置设为舵机30,所述摆臂40的一端连接于所述舵机 30的输出轴上。驱动装置用作提供摆臂40摆动的动力来源,选择舵机30作为驱动装置,因为舵机30作为一种结构成熟的功能件,市场上有现成的成品可以购买,其功能是用于一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。因此用作此处是为了方便系统自动控制。另外,为了固定舵机30,本实施例还公开了一种优选的固定方式,即是:还包括固定框31,所述固定框31包覆于所述舵机30的外周,并通过螺丝固定于所述导轨10 下侧。固定框31包覆住舵机30,使得舵机30与导轨10无需单独进行连接固定,方便舵机30的拆装而不容易损坏。
40.在其中一种实施方式中,所述弹性装置设为设为扭簧90,所述扭簧90套设于所述锁臂60铰接在导轨10上的铰接轴上。采用扭簧 90作为弹性装置的其中一种选择,可将扭簧90直接安装在锁臂60 铰接在导轨10上的铰接轴上,因此安装方便,不用另外增设用于安装弹性装置的结构及空间,进一步简化了整体结构。
41.所述锁臂60的中部设有第一转折部62和第二转折部63,其铰接的位置位于第一转折部62与第二转折部63之间,其上端自第一转折部62倾斜向上延伸,去下端自第二转折部63倾斜向下延伸。通过第一转折部62以改变锁臂60上端的延伸方向,第二转折部63用于改变锁臂60下端的延伸方向,从而形成锁臂60上端朝外翻、下端朝内翻的形状,以适配其上侧的卡口12以及其下侧的推杆50,在不增设其他传动结构的前提下实现运动转向的目的,节约了空间利用,简化了结构设计。
42.所述锁臂60的下端设有增宽部,所述增宽部与所述推杆50的位置相正对。通过设置增宽部,可确保推杆50与锁臂60之间的接触更可靠,不至于带来由于位置偏差而造成接触不到的情况发生。
43.在其中一种实施方式中,还包括限位块70,所述限位块70设于所述导轨10下侧位于推杆50中部的位置,限位块70上设有限位槽 71,所述固定轴80设于所述限位槽71中,所述推杆50穿过所述限位槽71,且推杆50的两端分别从限位槽71两端伸出。限位块70用于设置限位槽71,通过限位槽71提供固定轴80的安装位置,同时利用限位槽71对推杆50的运动方向进行限位,使推杆50仅能朝限位槽71延伸的方向运动,使运动不出现跑偏,帮助推杆50对准锁臂 60的下端的增宽部,也进一步避免曲柄机构卡死。
44.综上所述,本实用新型的导轨与滑块间的曲柄锁闭装置,控制精度高,可应用在机器人充电时对轨道上的机器人进行固定,以确保充电的可靠性。
45.尽管已描述了本实用新型的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本实用新型范围的所有变更和修改。显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1