一种移动式太阳能自动寻光发电车的制作方法
1.本实用新型涉及发电技术领域,具体涉及一种移动式太阳能自动寻光发电车。
背景技术:
2.目前通信基站因受突发事件影响或无常电地域而采用油机发电,因此带来的高额成本费用;太阳能产业近年在我国发展迅速,且应用场景复杂多样,推动绿色清洁能源技术从实验室研究到今后的产业化应用做好技术储备等,进行的战略性的投资。
3.综上所述,现有的城市发电大多数采用火力发电,此种发电方式的成本较高,并且对环境造成污染,并且现有的太阳能发电,由于太阳在一天中所处的位置不断的变化,阳光无法持续的照在太阳能板上,导致无法持续发电的问题。
技术实现要素:
4.本实用新型为解决现有的城市发电大多数采用火力发电,此种发电方式的成本较高,并且对环境造成污染,并且现有的太阳能发电,由于太阳在一天中所处的位置不断的变化,阳光无法持续的照在太阳能板上,导致无法持续发电的问题,而提出一种移动式太阳能自动寻光发电车。
5.本实用新型的一种移动式太阳能自动寻光发电车,其结构包括一号太阳能电池板、支撑杆、一号气缸、二号太阳能电池板、二号气缸、光伏跟踪回转减速器、底座、液压支臂和车轮;
6.底座的上表面中部设有一个光伏跟踪回转减速器,光伏跟踪回转减速器的输出端与支撑杆的底端固定连接,光伏跟踪回转减速器的输入端与电机的输出端连接,电机固定在底座上,支撑杆的顶端与二号太阳能电池板的一端铰连接,二号太阳能电池板的一端与一号太阳能电池板的一端铰连接,支撑杆沿圆周外表面上均匀的设有一个一号气缸和一个二号气缸,且一号气缸的底座与支撑杆的外表面铰连接,二号气缸的底座与支撑杆的外表面铰连接,一号气缸的活塞杆的顶端与一号太阳能电池板的下表面中部铰连接,二号气缸的活塞杆的顶端与二号太阳能电池板的下表面中部铰连接,底座的沿长边方向的两端分别设有一个液压支臂,底座的两个侧面分别设有一个光轴,每个光轴上设有一个车轮,且车轮的内圈嵌设有轴承;
7.进一步的,所述的底座的短边端面的中部设有一个拖杆,且拖杆的上表面一端设有通孔,连接杆的底部穿过拖杆上的通孔之后,与车轮架的顶部连接,且车轮架上设有滚轮;
8.进一步的,所述的连接杆的顶部设有手轮;
9.进一步的,所述的手轮的圆周外表面设有一层防滑胶;
10.进一步的,所述的一号太阳能电池板和二号太阳能电池板上表面的面积相同;
11.进一步的,所述的底座上表面均匀的设有两个气泵,其中一个气泵的输出端与一号气缸的进气孔连接,另一个气泵的输出端与二号气缸的进气孔连接;
12.进一步的,所述的底座上表面的一端设有控制箱,且控制箱内设有中央控制器,光伏跟踪回转减速器光伏信号输出端与中央控制器的光伏限号输入端连接,中央控制器的驱动信号输出端与电机连接,中央控制器的一个气动信号输出端与一个气缸连接,中央控制器的另一个气动信号输出端与另一个气缸连接;
13.进一步的,所述的车轮的直径为50cm~100cm;
14.进一步的,所述的中央控制器采用plc控制器;
15.进一步的,在使用时,将移动式太阳能自动寻光发电车移动到空旷的地方,利用光伏跟踪回转减速器追寻光源,并将光伏跟踪回转减速器的光伏信号传递到中央控制器中,中央控制器将驱动信号传递到电机上,电机启动,电机带动光伏跟踪回转减速器的输出端转动,光伏跟踪回转减速器的输出端带动支撑杆转动,使一号太阳能电池板和二号太阳能电池板的上表面冲向阳光充足的方向,完成后电机停止;
16.中央控制器将气动信号传递到气泵上,通过一号气缸控制一号太阳能电池板的倾斜角度,通过二号气缸控制二号太阳能电池板的倾斜角度,以便使太阳能电池板充分接触阳光,从而实现长时间连续的发电。
17.本实用新型与现有技术相比具有以下有益效果:
18.本实用新型克服了现有技术的缺点,采用太阳能电池板进行发电,是一种绿色的清洁能源,避免对环境造成污染,并且成本较底;
19.利用光伏跟踪回转减速器追寻光源,并将光伏跟踪回转减速器的光伏信号传递到中央控制器中,中央控制器将驱动信号传递到电机上,电机启动,电机带动光伏跟踪回转减速器的输出端转动,光伏跟踪回转减速器的输出端带动支撑杆转动,使一号太阳能电池板和二号太阳能电池板的上表面冲向阳光充足的方向,从而实现太阳能电池板上表面可以实时的面对阳光,从而实现长时间的持续发电。
附图说明
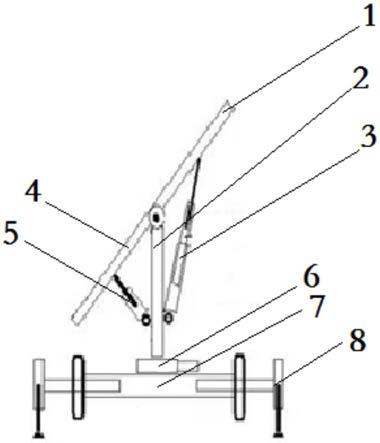
20.图1是本实用新型所述的一种移动式太阳能自动寻光发电车展开状态下的侧视图;
21.图2是本实用新型所述的一种移动式太阳能自动寻光发电车收缩状态下的主视图;
22.图3是本实用新型所述的一种移动式太阳能自动寻光发电车收缩状态下的侧视图;
23.图4是本实用新型所述的一种移动式太阳能自动寻光发电车展开状态下的主视图。
具体实施方式
24.具体实施方式一:结合图1至图4说明本实施方式,本实施方式所述的一种移动式太阳能自动寻光发电车,包括一号太阳能电池板1、支撑杆2、一号气缸3、二号太阳能电池板4、二号气缸5、光伏跟踪回转减速器6、底座7、液压支臂8和车轮13;
25.底座7的上表面中部设有一个光伏跟踪回转减速器6,光伏跟踪回转减速器6的输出端与支撑杆2的底端固定连接,光伏跟踪回转减速器6的输入端与电机的输出端连接,电
机固定在底座7上,支撑杆2的顶端与二号太阳能电池板4的一端铰连接,二号太阳能电池板4的一端与一号太阳能电池板1的一端铰连接,支撑杆2沿圆周外表面上均匀的设有一个一号气缸3和一个二号气缸5,且一号气缸3的底座与支撑杆2的外表面铰连接,二号气缸5的底座与支撑杆2的外表面铰连接,一号气缸3的活塞杆的顶端与一号太阳能电池板1的下表面中部铰连接,二号气缸5的活塞杆的顶端与二号太阳能电池板4的下表面中部铰连接,底座7的沿长边方向的两端分别设有一个液压支臂8,底座7的两个侧面分别设有一个光轴,每个光轴上设有一个车轮13,且车轮13的内圈嵌设有轴承;
26.本具体实施方式,在使用时,将移动式太阳能自动寻光发电车移动到空旷的地方,利用光伏跟踪回转减速器6追寻光源,并将光伏跟踪回转减速器6的光伏信号传递到中央控制器中,中央控制器将驱动信号传递到电机上,电机启动,电机带动光伏跟踪回转减速器6的输出端转动,光伏跟踪回转减速器6的输出端带动支撑杆2转动,使一号太阳能电池板1和二号太阳能电池板4的上表面冲向阳光充足的方向,完成后电机停止;
27.中央控制器将气动信号传递到气泵上,通过一号气缸3控制一号太阳能电池板1的倾斜角度,通过二号气缸5控制二号太阳能电池板4的倾斜角度,以便使太阳能电池板充分接触阳光,从而实现长时间连续的发电。
28.具体实施方式二:结合图2说明本实施方式,本实施方式是对具体实施方式一所述的发电车的进一步的限定,本实施方式所述的一种移动式太阳能自动寻光发电车,所述的底座7的短边端面的中部设有一个拖杆9,且拖杆9的上表面一端设有通孔,连接杆10 的底部穿过拖杆9上的通孔之后,与车轮架的顶部连接,且车轮架上设有滚轮11;
29.本具体实施方式,采用底座7的短边端面的中部设有一个拖杆9,且拖杆9的上表面一端设有通孔,连接杆10的底部穿过拖杆9上的通孔之后,与车轮架的顶部连接,且车轮架上设有滚轮11;便于移动位置。
30.具体实施方式三:结合图2说明本实施方式,本实施方式是对具体实施方式二所述的发电车的进一步的限定,本实施方式所述的一种移动式太阳能自动寻光发电车,所述的连接杆10的顶部设有手轮。
31.具体实施方式四:结合图2说明本实施方式,本实施方式是对具体实施方式三所述的发电车的进一步的限定,本实施方式所述的一种移动式太阳能自动寻光发电车,所述的手轮的圆周外表面设有一层防滑胶;
32.本具体实施方式,采用手轮的圆周外表面设有一层防滑胶,避免在操作的时候出现打滑的现象。
33.具体实施方式五:结合图2说明本实施方式,本实施方式是对具体实施方式一所述的发电车的进一步的限定,本实施方式所述的一种移动式太阳能自动寻光发电车,所述的一号太阳能电池板1和二号太阳能电池板4上表面的面积相同。
34.具体实施方式六:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的发电车的进一步的限定,本实施方式所述的一种移动式太阳能自动寻光发电车,所述的底座7上表面均匀的设有两个气泵,其中一个气泵的输出端与一号气缸3的进气孔连接,另一个气泵的输出端与二号气缸5的进气孔连接。
35.具体实施方式七:结合图2说明本实施方式,本实施方式是对具体实施方式一所述的发电车的进一步的限定,本实施方式所述的一种移动式太阳能自动寻光发电车,所述的
底座7上表面的一端设有控制箱,且控制箱内设有中央控制器,光伏跟踪回转减速器6 光伏信号输出端与中央控制器的光伏限号输入端连接,中央控制器的驱动信号输出端与电机连接,中央控制器的一个气动信号输出端与一个气缸连接,中央控制器的另一个气动信号输出端与另一个气缸连接;
36.本具体实施方式,利用光伏跟踪回转减速器追寻光源,并将光伏跟踪回转减速器的光伏信号传递到中央控制器中,中央控制器将驱动信号传递到电机上,电机启动,电机带动光伏跟踪回转减速器的输出端转动,光伏跟踪回转减速器的输出端带动支撑杆转动,使一号太阳能电池板和二号太阳能电池板的上表面冲向阳光充足的方向,从而实现太阳能电池板上表面可以实时的面对阳光,从而实现长时间的持续发电。
37.具体实施方式八:结合图2说明本实施方式,本实施方式是对具体实施方式一所述的发电车的进一步的限定,本实施方式所述的一种移动式太阳能自动寻光发电车,所述的车轮13的直径为50cm~100cm。
38.具体实施方式九:结合图2说明本实施方式,本实施方式是对具体实施方式七所述的发电车的进一步的限定,本实施方式所述的一种移动式太阳能自动寻光发电车,所述的中央控制器采用plc控制器。
39.工作原理
40.在使用时,将移动式太阳能自动寻光发电车移动到空旷的地方,利用光伏跟踪回转减速器6追寻光源,并将光伏跟踪回转减速器6的光伏信号传递到中央控制器中,中央控制器将驱动信号传递到电机上,电机启动,电机带动光伏跟踪回转减速器6的输出端转动,光伏跟踪回转减速器6的输出端带动支撑杆2转动,使一号太阳能电池板1和二号太阳能电池板4的上表面冲向阳光充足的方向,完成后电机停止;
41.中央控制器将气动信号传递到气泵上,通过一号气缸3控制一号太阳能电池板1的倾斜角度,通过二号气缸5控制二号太阳能电池板4的倾斜角度,以便使太阳能电池板充分接触阳光,从而实现长时间连续的发电。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1