一种应用于太阳能板清洁的移动平台的制作方法
1.本实用新型涉及太阳能板清洁设备技术领域,尤其涉及一种应用于太阳能板清洁的移动平台。
背景技术:
2.太阳能作为一种重要的清洁能源,近年来逐渐受到人们的重视,而利用太阳能电池板将太阳能转换为电能,是利用太阳能的一种非常重要的手段。随着时间的推移,以太阳能电池板为基础的太阳能发电站越来越多。但是,太阳能电池板的发电性能容易受到外界因素的影响,当太阳能电池板的表面覆盖灰尘等杂物时其发电效率将大大降低,若采用人工清灰的方式,对于大规模使用太阳能电池板的太阳能发电站而言,将浪费大量的时间与人力。
3.中国专利公开了一种太阳能电池板清洁机器人【申请号:cn201822020674.4、公开号:cn209715782u】包括:太阳能电池板清洁机器人可以通过其中的控制系统通过两个涵道风机平衡系统控制自行履带车在太阳能电池板斜面上行走,该自行履带车可以根据控制系统的控制,通过两个履带驱动轮在太阳能电池板斜面上行走。虽然该专利的技术方案能够对太阳能电池板进行自动清洁,但是该技术方案仅能对一排太阳能电池板进行清洁,其自身不具备由一排太阳能电池板运动至另一排太阳能电池板上的能力,这就导致每排太阳能电池板都要配置相应的清洁机器人,这对于太阳能发电站而言,安装成本过高。
技术实现要素:
4.针对现有技术的技术问题,本实用新型提供了一种应用于太阳能板清洁的移动平台。
5.为解决上述技术问题,本实用新型提供了以下的技术方案:
6.一种应用于太阳能板清洁的移动平台,包括:滑轨、承载平台、对接轨道;滑轨设置在太阳能电池板阵列的一侧;对接轨道设置在滑轨与太阳能电池板阵列之间,对接轨道的数量为多个,各对接轨道与太阳能电池板阵列的各排一一相对应;承载平台,用于承载清洁机器人,并且能够沿滑轨在对接轨道之间滑动。
7.在实际运行时,将清洁机器人置于承载平台上。当清洁机器人开始运转时,将脱离承载平台通过对接轨道行进至太阳能电池板阵列上。当清洁机器人完成太阳能电池板阵列的清洁后,将通过对接轨道返回至承载平台上。此时,可对承载平台进行控制,使得承载平台承载着清洁机器人运动至另一对接轨道处,使得清洁机器人能够对另一排的太阳能电池板阵列进行清洁。
8.进一步的,滑轨上设置有到位检测装置,到位检测装置与对接轨道相对应;到位检测装置包括摆动部、安装杆;摆动部可摆动的设置在安装杆的一端;安装杆的另一端与滑轨相连接;安装杆上设置有感应装置,当摆动部摆动至感应装置的感应范围内时,感应装置输出电信号。
9.进一步的,承载平台包括承载杆;承载杆之间相互平行;承载杆上设置有滑轮,承载杆通过滑轮可滑动的设置在滑轨上。
10.进一步的,承载杆上还设置有限位轮;滑轨上设置有与限位轮相对应的滑槽;限位轮可滑动的嵌入在滑槽内。
11.进一步的,承载平台还包括加强杆;加强杆设置在承载杆之间;加强杆的两端与承载杆固定连接。
12.进一步的,承载平台还包括对接杆;对接杆与承载杆相连接;对接杆突出于承载杆的一侧;当承载平台运动至对接轨道处时,对接杆能够与对接轨道相对应。
13.进一步的,还包括动力装置;动力装置,设置在滑轨的其中一端或两端;动力装置与承载平台传动连接以带动承载平台沿滑轨滑动。
14.进一步的,动力装置包括绞线杆、动力电机;动力电机与绞线杆传动连接;绞线杆上缠绕有钢线,绞线杆通过钢线与承载平台连接。
15.进一步的,绞线杆的转轴与对接轨道的延伸方向之间设置有夹角。
16.进一步的,动力装置还包括传动装置,传动装置设置在绞线杆与动力电机之间;传动装置包括主动齿、从动齿;主动齿与动力电机相连接,从动齿与绞线杆相连接;主动齿之间设置有间隙,从动齿伸入间隙内;主动齿与从动齿之间设置有橡胶。
17.相较于现有技术,本实用新型具有以下优点:
18.利用滑轨、承载平台、对接轨道、动力装置的配合至下,能够将清洁机器人由一排太阳能电池板阵列带动至另一排太阳能电池板阵列处,从而使得一个清洁机器人能够对多排太阳能电池板阵列进行清洁,从而有效的降低了太阳能发电站的配置成本。
19.绞线杆呈倾斜状态设置,使得绞线杆收回钢线时,钢线能够均匀的由绞线杆的一端缠绕至另一端,从而有效的避免了钢线缠绕至一团影响到动力装置的正常运行。
20.利用传动装置为动力装置与绞线杆之间的连接预留有一定的活动空间,一方面满足绞线杆的安装需求,另一方面可有效避免因运行时间过长动力电机、绞线杆安装松脱时造成动力电机、绞线杆的损坏。同时,也便于工作人员的安装。
附图说明
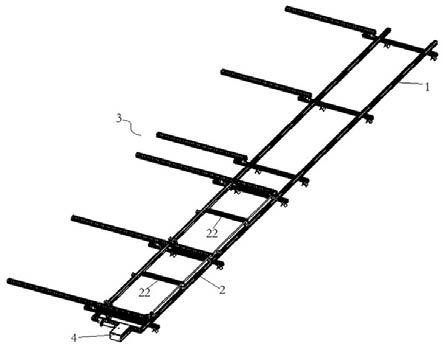
21.图1:整体结构图。
22.图2:滑轨局部放大图。
23.图3:承载平台局部放大图。
24.图4:动力装置结构图。
25.图5:传动装置放大图。
26.图6:到位检测装置结构图。
27.图中:1
‑
滑轨、11
‑
连接块、12
‑
滑槽、13
‑
到位检测装置、131
‑
摆动部、1311
‑
弧形对接口、132
‑
安装杆、2
‑
承载平台、21
‑
承载杆、211
‑
滑轮、212
‑
限位轮、22
‑
加强杆、23
‑
对接杆、3
‑
对接轨道、31
‑
子轨道、4
‑
动力装置、41
‑
绞线杆、42
‑
动力电机、43
‑
传动装置、431
‑
主动齿、432
‑
从动齿。
具体实施方式
28.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
29.一种应用于太阳能板清洁的移动平台,包括:滑轨1、承载平台2、对接轨道3、动力装置4。滑轨1设置在太阳能电池板阵列的一侧,滑轨1上设置有用于与对接轨道3相连接的连接块11。对接轨道3设置在滑轨1与太阳能电池板阵列之间,对接轨道3的数量为多个,对接轨道3与太阳能电池板阵列相对应。其中,一条对接轨道3至少包括三根子轨道31,其中两根子轨道31分别对应太阳能电池板阵列的端部,另一根子轨道31对应太阳能电池板阵列的中部。子轨道31的一端通过连接块11固定连接,利用连接块11,使得子轨道31能够与承载平台2的上平面相持平。承载平台2包括承载杆21、加强杆22、对接杆23。承载杆21的数量为两个,承载杆21之间平行设置,承载杆21上设置有滑轮211,承载杆21通过滑轮211可滑动的设置在滑轨1上。承载杆21上还设置有限位轮212,滑轨1上设置有与限位轮212相对应的滑槽12,限位轮212可滑动的嵌入在滑槽12内。其中,滑轮211与限位轮212分别置于滑轨1上两个相互垂直的平面上。利用限位轮212,一方面可对承载平台2的滑动范围进行限制,另一方面可有效防止承载平台2在风力或其他外力的影响下发生倾翻。加强杆22设置在承载杆21之间,加强杆22的两端与承载杆21固定连接用以加强承载平台2自身的结构强度。对接杆23与承载杆21相连接,对接杆23突出于承载杆21的一侧,对接杆23的数量至少为三个,对接杆23与子轨道31一一对应,当承载平台2运动至对接轨道3处时,对接杆23能够与子轨道31相对应,此时对接杆23与子轨道31位于同一直线上。若需要清洁的太阳能电池板阵列呈倾斜状态排布,则动力装置4的数量为一个,动力装置4设置在滑轨1的一端,当承载平台2由滑轨1较高的一端运动至较低的一端时,动力装置4释放使得承载平台2在重力作用下沿滑轨1滑动,当承载平台2由滑轨1较低的一端运动至较高的一端时,动力装置4拉动承载平台2滑动。若需要清洁的太阳能电池板阵列呈水平状态排布,则动力装置4的数量为两个,动力装置4分别设置在滑轨1的两端,用以带动承载平台2沿两个不同的方向运动,使得承载平台2能够由滑轨1的一端运动至另一端。
30.在实际运行时,对接轨道3的数量可以为两个或两个以上,以两个对接轨道3为例,即有六个子轨道31以分别对应两排太阳能电池板阵列。清洁机器人置于承载平台2上,清洁机器人的轮子与承载杆21相接触。清洁机器人可采用如申请号为cn201822020674.4的专利文件中所描述的形式,或者采用与之相近的其他形式。当清洁机器人运行时,将沿着对接杆23运动,最终通过对接轨道3运动至太阳能电池板阵列上。当完成对太阳能电池板阵列的清洁时,清洁机器人将反向运动,最终通过对接轨道3返回至承载平台2上,此时,可采用人工控制的形式,启动动力装置4,使得承载平台2承载着清洁机器人运动至下一对接轨道3处,此时,对接杆23与下一对接轨道3完成对接,清洁机器人再次启动,从而完成下一排太阳能电池板阵列的清洁。由此,可使得单个清洁机器人能够对两排太阳能电池板阵列或多排太阳能电池板阵列进行清洁,从而无需为每排太阳能电池板阵列设置相应的清洁机器人,进而极大的降低了太阳能发电站的配置成本。具体的,与清洁机器人运行有关的控制方式可采用现有技术实现,这并非本实用新型的重点,顾本说明书中不再赘述。
31.在滑轨1上设置到位检测装置13,用以检测清洁机器人是否移动至承载平台2上。到位检测装置13的安装位置应与对接轨道3相对应,使得清洁机器人运动至承载平台2上
时,能够触发到位检测装置13。具体的,到位检测装置13包括摆动部131、安装杆132。摆动部131可摆动的安装在安装杆132的一端,安装杆132的另一端与滑轨1固定连接。摆动部131上设置有小磁块,安装杆132上设置有磁感传感器。摆动部131上还设置有弧形对接口1311。清洁机器人上设置有用于推动摆动部131进行摆动的推杆。在清洁机器人运动至承载平台2上的过程中,推杆将进入弧形对接口1311内,随着清洁机器人的运动,推杆将推动摆动部131进行摆动,使得小磁块运动至磁感传感器的感应范围内从而触发磁感传感器。此时,磁感传感器输出相应的电信号,表明清洁机器人已经运动至承载平台2上。当清洁机器人脱离承载平台2时,推杆将脱离弧形对接口1311,从而推动摆动部131反向摆动,使得摆动部131反向摆动至初始位置。其中,摆动部131上还设置有拉簧,拉簧的一端与摆动部131相连接,拉簧的另一端与安装杆132相连接。拉簧持续的向摆动部131施加拉力,从而在摆动部131摆动过程中,拉动摆动部131摆动到位,以避免因摆动部131摆动不到位所造成的磁感传感器误判。
32.其中,感应装置也可采用光传感器,当摆动部131遮挡到光传感器时,光传感器输出相应的电信号。
33.其中,动力装置4包括绞线杆41、动力电机42、传动装置43。动力电机42与绞线杆41通过传动装置43传动连接。绞线杆41上缠绕有钢线,绞线杆41通过钢线与承载平台2连接。
34.以太阳能电池板阵列呈倾斜状态排布为例。当需要承载平台2由滑轨1较高的一端运动至较低的一端时。动力电机42动作,从而带动绞线杆41转动,使得绞线杆41放出缠绕的钢线,使得承载平台2在重力在重力作用下延滑轨1滑动。当需要承载平台2由滑轨1较低的一端运动至较高的一段时。动力电机42反向动作,从而带动绞线杆41反向转动,使得绞线杆41收回钢线,从而拉动承载平台2沿滑轨1反向滑动。其中,绞线杆41的转轴与对接轨道3的延伸方向之间设置有夹角,即绞线杆41为倾斜设置。使得绞线杆41在说会钢线时,能够使得钢线均匀的由绞线杆41的一端缠绕至另一端,有效的避免了钢线在绞线杆41上缠绕成一团,影响到动力装置4的正常运行。
35.其中,传动装置43包括主动齿431、从动齿432。主动齿431与动力电机42相连接,主动齿431沿动力电机42的转轴方向延伸,相邻的两个主动齿431之间设置有间隙。从动齿432与绞线杆41相连接,从动齿432沿绞线杆41的转轴方向延伸,相邻的两个从动齿432之间设置有间隙。从动齿432伸入主动齿431之间的间隙内,从而使得两者相互啮合。主动齿431与从动齿432之间设置有橡胶。由此,主动齿431与从动齿432之间并非刚性连接,主动齿431与从动齿432之间存在一定的活动空间,进而使得动力电机42与绞线杆41之间存在一定的活动空间,容许动力电机42的转动轴与绞线杆41的转动轴之间存在一定的夹角。一方面满足绞线杆倾斜设置的需求,另一方面为动力电机42、绞线杆41的转动预留了一定的容错空间,有效的避免了因运行时间的增长导致动力电机42与绞线杆41的安装产生一定的松脱时,动力电机42或绞线杆41发生严重损坏。同时,也便于安装人员的安装。
36.值得注意的是,本说明书中所描述的两排太阳能电池板指的是两排之间相互独立,在实际安装时,两者之间设置有一定间距的太阳能发电装置。并非位于同一太阳能发电装置上相互平行铺设的太阳能硅板。
37.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1