一种造浪水泵无刷电机驱动电路的制作方法
1.本实用新型涉及电机驱动技术领域,具体涉及一种造浪水泵无刷电机驱动电路。
背景技术:
2.随着养鱼人数的不断增多,养鱼的配套设备也不断丰富起来,造浪水泵是一种模拟自然水流,满足鱼缸生物生长需求的重要设备,目前市场上的造浪水泵大都使用有刷电机,导致产品使用寿命短、占用空间大,而且这种造浪水泵产生涌浪都是一样的,没有大小浪的分别,也没有定时功能,插上电源就一直开,拔掉电源才能关,如果使用者忘记把关闭电源就会一直开,产生的耗能高,由于有刷电机工作时会产生噪音,对部分鱼缸生物有不良影响。
3.无刷电机水泵具有体积变小,使用寿命会长的优势受到人们的青睐,但是现有的无刷电机水泵主要由电机动力装置、电机电控驱动系统和人机交互的操作控制等电子电路单元构成,电路结构复杂,使用的电子元器件也多,导致生产成本增加,不利于市场推广。
技术实现要素:
4.为克服现有技术所存在的缺陷,现提供一种造浪水泵无刷电机驱动电路,以解决现有的无刷电机水泵主要由电机动力装置、电机电控驱动系统和人机交互的操作控制等电子电路单元构成,电路结构复杂,使用的电子元器件也多,导致生产成本增加,不利于市场推广的问题。
5.为实现上述目的,提供一种造浪水泵无刷电机驱动电路,包括:
6.智能微处理器mcu,所述智能微处理器mcu连接驱动模块和三相全桥电路;
7.驱动模块,所述驱动模块通过uh、ul、vh、vl、wh、wl分别连接功率开关管q1、q2、q3、q4、q5、q6;
8.三相全桥电路,所述三相全桥电路包括三相桥臂,所述三相桥臂的正端连接电源正极bat,所述三相桥臂的负端连接电阻r1;
9.电机m1,所述电机m1的三相绕组分别连接所述三相桥臂;
10.电源,所述电源负极接地gnd,所述电源负极连接所述电阻r1。
11.进一步的,所述驱动模块包括电机驱动芯片u2及其外围电路,电机驱动芯片u2的型号为ck6a56。
12.进一步的,所述电机驱动芯片u2的8号管脚和10号管脚连接场效应管ic1,所述电机驱动芯片u2的9号管脚和11号管脚连接场效应管ic2,所述电机驱动芯片u2的6号管脚和5号管脚连接场效应管ic3,场效应管ic1、场效应管ic2和场效应管ic3的型号为ao4629。
13.进一步的,所述电机驱动芯片u2的4号管脚和3号管脚分别连接电源正极bat和地gnd,所述电机驱动芯片u2的2号管脚连接下拉电阻r14,所述电机驱动芯片u2的14号管脚连接电流检测电路,所述电机驱动芯片u2的7号管脚、13号管脚和12号管脚连接智能微处理器mcu的i/o口。
14.进一步的,所述电机驱动芯片u2的18号管脚、19号管脚和20号管脚连接电机m1内置的霍尔传感器的输出信号,所述驱动芯片u2的17号管脚和16号管脚连接充电电路,所述电机驱动芯片u2的15号管脚连接led转速显示电路。
15.进一步的,所述三相全桥电路包括六个功率开关管q1、q2、q3、q4、q5、q6,所述功率开关管q1、q2、q3、q4、q5和q6的栅极g分别连接uh、vh、wh、ul、vl和wl。
16.进一步的,所述功率开关管q1与q4串联形成a相桥臂,所述功率开关管q2与q5串联形成b相桥臂,所述功率开关管q3与q6串联形成c相桥臂,且a相桥臂、b相桥臂和c相桥臂并联在一起。
17.进一步的,所述功率开关管q1的漏极d和所述功率开关q2的漏极d均连接u端,所述功率开关管q2的漏极d和所述功率开关q5的漏极d均连接v端,所述功率开关管q3的漏极d和所述功率开关q6的漏极d均连接w端,且所述电机m1的三相绕组分别连接u端、v端和w端。
18.本实用新型的有益效果在于,本实用新型的造浪水泵无刷电机驱动电路利用智能微处理器mcu控制驱动模块驱动三相全桥电路,避免使用多个的三极管去控制三相全桥电路,实现减少电路中的电子器件,降低了生产成本,利用电机驱动芯片u2使电路结构小型化、集成化,方便减小产品体积,利用智能微处理器mcu实现定时造浪、改变造浪大小,丰富产品功能,增强产品的市场竞争力。
附图说明
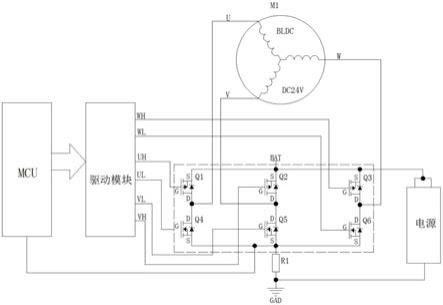
19.图1为本实用新型实施例的电路示意图;
20.图2为本实用新型实施例的电路原理图。
具体实施方式
21.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
22.参照图1至图2所示,本实用新型提供了一种造浪水泵无刷电机驱动电路,包括:智能微处理器mcu、驱动模块、三相全桥电路、电机m1和电源。
23.具体的,智能微处理器mcu,智能微处理器mcu连接驱动模块和三相全桥电路;
24.驱动模块,驱动模块通过uh、ul、vh、vl、wh、wl分别连接功率开关管q1、q2、q3、q4、q5、q6;
25.三相全桥电路,三相全桥电路包括三相桥臂,三相桥臂的正端连接电源正极bat,三相桥臂的负端连接电阻r1;
26.电机m1,电机m1的三相绕组分别连接三相桥臂;
27.电源,电源负极接地gnd,电源负极连接电阻r1。
28.在使用该造浪水泵无刷电机驱动电路时,智能微处理器mcu发出控制信号给驱动模块,让驱动模块通过uh、ul、vh、vl、wh、wl控制功率开关管q1、q4、q2、q5、q3、q6开通关断,此时水泵电机m1开始运转,当功率开关管q1导通,电流进入功率开关管q1进入,然后开通功率开关管q5或q6,使电流从功率开关管q5或q6流出,电流经过uv或者uw,形成一个磁场让电
机m1运转起来,同上,开通功率开关管q2、q3也是如此;电机m1正常运转之后,智能微处理器mcu通过控制信号,控制水泵电机m1的转速,使水流产生快慢不同的冲击效果,从而营造一种自然水浪的感觉,增强鱼缸的观赏性。
29.在本实施例中,如图1和图2所示,驱动模块包括电机驱动芯片u2及其外围电路,电机驱动芯片u2的型号为ck6a56,使用电机驱动芯片u2集成化电路结构,减少了电路体积和复杂程度。
30.在本实施例中,如图2所示,电机驱动芯片u2的8号管脚和10号管脚连接场效应管ic1,电机驱动芯片u2的9号管脚和11号管脚连接场效应管ic2,电机驱动芯片u2的6号管脚和5号管脚连接场效应管ic3,场效应管ic1、场效应管ic2和场效应管ic3的型号为ao4629,8号管脚和10号管脚用于输出信号驱动a相桥臂的上下两管,9号管脚和11号管脚用于输出信号驱动b相桥臂的上下两管,6号管脚和5号管脚用于输出信号驱动c相桥臂的上下两管。
31.在本实施例中,如图2所示,电机驱动芯片u2的4号管脚和3号管脚分别连接电源正极bat和地gnd,电机驱动芯片u2的2号管脚连接下拉电阻r14,电机驱动芯片u2的14号管脚连接电流检测电路,电流反馈输入14号管脚,方便对电路进行保护,电机驱动芯片u2的7号管脚、13号管脚和12号管脚连接智能微处理器mcu的i/o口,7号管脚输入vpp信号,13号管脚用于电机驱动芯片u2和智能微处理器mcu之间的双向通信,14号管脚输入时钟信号,方便实现定时造浪功能。
32.在本实施例中,如图2所示,电机驱动芯片u2的18号管脚、19号管脚和20号管脚连接电机m1内置的霍尔传感器的输出信号,驱动芯片u2的17号管脚和16号管脚连接充电电路,电机驱动芯片u2的15号管脚连接led转速显示电路,17号管脚用于电池充电状态只是输出,16号管脚用于电池故障状态指示输出。
33.在本实施例中,如图1所示,三相全桥电路包括六个功率开关管q1、q2、q3、q4、q5、q6,功率开关管q1、q2、q3、q4、q5和q6的栅极g分别连接uh、vh、wh、ul、vl和wl。
34.在本实施例中,如图1所示,功率开关管q1与q4串联形成a相桥臂,功率开关管q2与q5串联形成b相桥臂,功率开关管q3与q6串联形成c相桥臂,且a相桥臂、b相桥臂和c相桥臂并联在一起,a相桥臂、b相桥臂和c相桥臂的正端接入电源正极bat,a相桥臂、b相桥臂和c相桥臂的负端接入电阻r1。
35.在本实施例中,如图1所示,功率开关管q1的漏极d和功率开关q2的漏极d均连接u端,功率开关管q2的漏极d和功率开关q5的漏极d均连接v端,功率开关管q3的漏极d和功率开关q6的漏极d均连接w端,且电机m1的三相绕组分别连接u端、v端和w端。
36.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1