一种绕线机的制作方法
1.本实用新型涉及一种伺服电机加工领域,特别涉及一种绕线机。
背景技术:
2.伺服电机在加工时需要在铁芯和磁钢的外表面绕线,在绕线之前需要在线上涂胶,现有的绕线方法是人工在线上涂胶,然后手持线的一端,线的另一端在磁钢的外表面缠绕,人工缠绕的力度不同,使得线缠绕的松紧程度不同,且人工缠绕线不均匀、涂胶不均匀,同时工作效率较低。
技术实现要素:
3.本实用新型解决的技术问题是提供一种能够自动在线上涂胶、自动将线缠绕在铁芯上、绕线均匀、绕线松紧一致、绕线效率高的绕线机。
4.本实用新型解决其技术问题所采用的技术方案是:一种绕线机,包括固定座,所述固定座上设置有铁芯定位工装,所述铁芯定位工装的下方设置有用于带动铁芯转动的转动机构,所述转动机构通过第一固定架连接有升降机构,所述转动机构和铁芯定位工装均与第一固定架固定连接;
5.所述铁芯定位工装的一侧设置有出线机构,所述铁芯定位工装和出线机构之间设置有给线涂胶的涂胶机构;
6.所述固定座上通过滑块和滑轨滑动连接有固定板,所述涂胶机构和出线机构均固定连接在固定板上,所述固定板上设置有第一固定架,所述第一固定架上通过第一上下移动机构连接有夹取机构,所述夹取机构的一侧设置有用于带动夹取机构水平移动的水平移动机构,所述固定板上通过第一前后移动机构连接有剪断机构,所述铁芯定位工装的一侧设置有扶正机构和贴紧机构;
7.所述固定座上设置有用于抓取铁芯并带动铁芯移动到铁芯定位工装上的抓取机构,所述绕线机还包括控制机构,所述转动机构、升降机构、夹取机构、水平移动机构、剪断机构、扶正机构、贴紧机构和抓取机构分别与控制机构电气连接。
8.进一步的是:所述涂胶机构包括胶桶,所述胶桶的两端对称设置有第一线嘴,所述第一连接板上位于胶桶远离出线机构的一侧设置有连接座,所述连接座上设置有一对第一滚轮,两个第一滚轮之间有供线穿过的间隙,所述连接座上有供线穿过的通孔,所述连接座远离第一滚轮的一侧设置有第二线嘴。
9.进一步的是:所述夹取机构包括夹爪和驱动夹爪张开或闭合的夹爪气缸;
10.所述第一上下移动机构包括通过连接件与夹爪气缸固定连接有第一气缸,所述第一气缸的驱动轴通过连接件与夹爪气缸固定连接;
11.所述水平移动机构包括通过连接件与第一气缸固定连接的第二气缸,所述第二气缸的驱动轴通过连接件与第一气缸固定连接,所述第二气缸固定设置在第一固定架上,所述夹爪气缸、第一气缸和第二气缸分别与控制机构电气连接。
12.进一步的是:所述剪断机构包括剪刀和驱动剪刀张开或闭合的驱动组件,所述第一前后移动机构为第三气缸,所述第三气缸的驱动轴与剪刀固定连接,所述第三气缸固定设置在固定板上,所述第三气缸与控制机构电气连接。
13.进一步的是:所述扶正机构包括固定设置在固定板上的第四气缸和第五气缸,所述第四气缸的驱动轴上通过连接件连接有第二滚轮,所述第五气缸的驱动轴上设置有连接块,所述连接块上通过轴转动连接有曲臂,所述曲臂远离轴的一端上转动连接有第三滚轮,所述连接块上位于曲臂的一侧设置有用于推动曲臂,使得第三滚轮靠近铁芯定位工装的第六气缸。
14.进一步的是:所述贴紧机构包括贴板和与贴板固定连接的摆臂,所述摆臂远离贴板的一端上固定连接有旋转气缸,所述旋转气缸通过连接件固定设置在固定座上,所述旋转气缸与控制机构电气连接。
15.进一步的是:所述铁芯定位工装的上方设置有中心销,所述中心销固定设置在第二连接板上,所述第二连接板的一侧设置有用于驱动第二连接板上下移动的第七气缸,所述第二连接板通过滑块和滑轨上下滑动连接有第二固定架,所述第二固定架固定设置在固定座上,所述第七气缸与控制机构电气连接。
16.本实用新型的有益效果是:本实用新型能够自动出线,自动在线上涂胶,并将涂在线上的胶滚均匀,能够自动拉线头到扶正机构处,所述扶正机构能够自动将线头扶正在磁钢上,转动机构带动贴心进行旋转,同时带动铁芯向下移动,使得线在磁钢上均匀的整齐的排列,同时所述贴紧机构使得涂胶后的线与磁钢紧密贴合,从而使得线更好的贴在磁钢上,绕线后,将线头剪断,再将线头贴在磁钢上,本技术实现了自动化,代替了人工,提高了绕线的精准度,使得绕线的一致性好,同时提高了工作效率。
附图说明
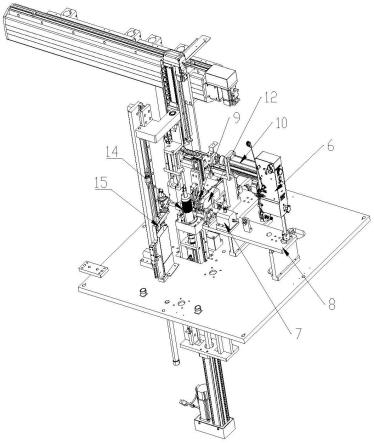
17.图1为一种绕线机的主视图;
18.图2为一种绕线机的部分结构示意图;
19.图3为涂胶机构、夹取机构和剪断机构的整体结构示意图;
20.图4为扶正机构的结构示意图;
21.图5为铁芯定位工装和贴紧机构的整体结构示意图;
22.图中标记为:2、铁芯定位工装;3、转动机构;4、第一固定架;5、升降机构;6、出线机构;7、涂胶机构;8、固定板;9、夹取机构;10、水平移动机构;11、第一前后移动机构; 12、剪断机构;14、扶正机构;15、贴紧机构;
23.201、中心销;202、第二连接板;203、第七气缸;204、第二固定架;
24.701、胶桶;702、第一线嘴;703、连接座;704、第一滚轮;705、第二线嘴;901、夹爪;902、夹爪气缸;903、第一气缸;904、第二气缸;
25.1201、剪刀;1202、第三气缸;1203、第一连接板;1401、第四气缸;1402、第五气缸; 1403、第二滚轮;1404、连接块;1405、曲臂;1406、第三滚轮;1407、第六气缸;1501、贴板;1502、摆臂;1503、旋转气缸。
具体实施方式
26.下面结合附图和具体实施方式对本实用新型进一步说明。
27.如图1、图2、图3所示,本技术的实施例提供了一种绕线机,该绕线机包括固定座,所述固定座上设置有铁芯定位工装2,所述铁芯定位工装2的下方设置有用于带动铁芯转动的转动机构3,所述转动机构3通过第一固定架4连接有升降机构5,所述转动机构3和铁芯定位工装2均与第一固定架4固定连接,所述转动机构3用于带动铁芯转动,从而可以对铁芯的外圈进行绕线,所述升降机构5用于带动铁芯下降,使得从铁芯的下部向铁芯的上部依次进行绕线。
28.所述铁芯定位工装2的一侧设置有出线机构6,所述铁芯定位工装2和出线机构6之间设置有给线涂胶的涂胶机构7,所述出线机构6用于供线,所述涂胶机构7用于在线涂胶,使得线在缠绕在铁芯上时,与铁芯粘合在一起。
29.所述固定座上通过滑块和滑轨滑动连接有固定板8,所述涂胶机构7和出线机构6均固定连接在固定板8上,所述固定板8上设置有第一固定架4,所述第一固定架4上通过第一上下移动机构连接有夹取机构9,所述夹取机构9的一侧设置有用于带动夹取机构9水平移动的水平移动机构10,所述固定板8上通过第一前后移动机构连接有剪断机构12,所述铁芯定位工装2的一侧设置有扶正机构14和贴紧机构15。
30.所述夹取机构9用于夹取线头,将线头从涂胶机构7处拉到扶正机构14处,所述剪断机构12用于在铁芯上绕线完成后将线剪断,所述扶正机构14用于将绕线前的线头扶正在磁钢上,防止线头松开后导致的整个磁钢上的线是松的,所述贴紧机构15用于压紧线和磁钢,使得线通过胶粘在磁钢上。
31.所述固定座上设置有用于抓取铁芯并带动铁芯移动到铁芯定位工装2上的抓取机构13,所述抓取机构13用于将铁芯抓取到铁芯定位工装2上。
32.所述绕线机还包括控制机构,所述转动机构3、升降机构5、夹取机构9、水平移动机构10、剪断机构12、扶正机构14、贴紧机构15和抓取机构13分别与控制机构电气连接。
33.抓取机构13将铁芯从上工位抓取到铁芯定位工装2上,所述出线机构6出线,线经过涂胶机构7进行涂胶,所述固定板8向后退,给夹取机构9腾空间,所述夹取机构9夹取线头并带动线头移动到铁芯定位工装2上的铁芯处,所述扶正机构14将线头扶正并贴合在磁钢上,转动机构3带动磁钢旋转,将线缠绕在磁钢上,所述贴紧机构15贴紧缠绕在铁芯上的线,同时所述升降机构5带动铁芯向下移动,线从下到上缠绕在铁芯上,缠绕完成后所述剪刀1201 机构向前移动并将线剪断,所述剪刀1201机构退回,所述固定板8退回,转动机构3带动线头转动到贴紧机构15处,同时所述贴紧机构15将线头贴紧在磁钢上,所述夹取机构9返回到涂胶机构7处,如此反复工作。
34.在上述基础上,如图4所示,所述涂胶机构7包括胶桶,所述胶桶的两端对称设置有第一线嘴702,所述固定板8上位于胶桶远离出线机构6的一侧设置有连接座703,所述连接座 703上设置有一对第一滚轮704,两个第一滚轮704之间有供线穿过的间隙,所述连接座703 上有供线穿过的通孔,所述连接座703远离第一滚轮704的一侧设置有第二线嘴705。
35.线从一对第一滚轮704之间经过用于使得线上的胶均匀,线经过靠近出线机构6的线嘴进入到胶桶内,经过一对第一滚轮704将线上的胶涂均匀,然后线经过第二线嘴705将线引出。
36.在上述基础上,所述夹取机构9包括夹爪901和驱动夹爪901张开或闭合的夹爪气缸902,所述夹爪气缸902驱动带动夹爪901张开或闭合,从而夹取线头,便于带动线头移动。
37.所述第一上下移动机构包括通过连接件与夹爪气缸902固定连接有第一气缸903,所述第一气缸903的驱动轴通过连接件与夹爪气缸902固定连接,所述第一气缸903驱动带动第一夹爪901上下移动。
38.所述水平移动机构10包括通过连接件与第一气缸903固定连接的第二气缸904,所述第二气缸904的驱动轴通过连接件与第一气缸903固定连接,所述第二气缸904固定设置在第一固定架4上,所述夹爪气缸902、第一气缸903和第二气缸904分别与控制机构电气连接,所述第二气缸904驱动带动夹爪901向左移动,从而夹取线头向左移动到铁芯的边侧,便于将线头扶正在磁钢上。
39.在上述基础上,所述剪断机构12包括剪刀1201和驱动剪刀1201张开或闭合的驱动组件,所述第一前后移动机构为第三气缸1202,所述第三气缸1202的驱动轴与剪刀1201固定连接,所述第三气缸1202固定设置在固定板8上,所述第三气缸1202与控制机构电气连接。
40.在绕线完成后,所述第三气缸1202驱动带动剪刀1201向前移动,使得剪刀1201移动到第二线嘴705处,所述驱动组件驱动带动剪刀1201张开和闭合,从而将线剪断。
41.在上述基础上,如图5所示,所述扶正机构14包括固定设置在固定板8上的第四气缸 1401和第五气缸1402,所述第四气缸1401的驱动轴上通过连接件连接有第二滚轮1403,所述第五气缸1402的驱动轴上设置有连接块1404,所述连接块1404上通过轴转动连接有曲臂 1405,所述曲臂1405远离轴的一端上转动连接有第三滚轮1406,所述连接块1404上位于曲臂1405的一侧设置有用于推动曲臂1405,使得第三滚轮1406靠近铁芯定位工装2的第六气缸1407。
42.在线头需要扶正时,所述第四气缸1401驱动带动第二滚轮1403移动到铁芯处,将线压在磁钢上,然后所述第五气缸1402驱动带动曲臂1405从而带动第三滚轮1406向铁芯的方向移动,从而将线头的一端压在磁钢上,从而将线头固定在磁钢上,完成线头扶正。
43.在上述基础上,所述贴紧机构15包括贴板1501和与贴板1501固定连接的摆臂1502,所述摆臂1502远离贴板1501的一端上固定连接有旋转气缸1503,所述旋转气缸1503通过连接件固定设置在固定座上,所述旋转气缸1503与控制机构电气连接。
44.贴紧机构15使用在两个场合,第一个场合是在旋转机构带动铁芯开始旋转开始绕线时,另一个应用场合是在绕线结束前,线被剪断后,将线头绕在磁钢上时。
45.铁芯转动起来绕线后,所述旋转气缸1503转动带动摆臂1502和贴板1501转动,使得贴板1501贴紧绕在磁钢上的线,从而使得线通过胶粘合在磁钢上。
46.在上述基础上,如图5所示,所述铁芯定位工装2的上方设置有中心销201,所述中心销201固定设置在第二连接板202上,所述第二连接板202的一侧设置有用于驱动第二连接板202上下移动的第七气缸203,所述第二连接板202通过滑块和滑轨上下滑动连接有第二固定架204,所述第二固定架204固定设置在固定座上,所述第七气缸203与控制机构电气连接。
47.抓取机构13将铁芯放置到铁芯定位机构上时,所述第七气缸203驱动带动中心销201向下移动,直至中心销201压住铁芯。
48.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1