马达的制作方法
1.本实用新型涉及马达。
背景技术:
2.专利文献1所记载的电动马达具备配置有支承转子的一方的轴承的保持部件、控制基板以及控制电路部。在专利文献1中,保持部件、控制基板以及控制电路部以在轴向上层叠的方式配置。
3.专利文献1:日本特开2013-115860号公报
4.现有的轴承保持架为具有保持轴承的筒状部和从筒状部朝向径向外侧呈板状扩展的例如圆板状部的形状。然而,在具有这样的轴承保持架的马达中,为了防止配置在基板上的电子部件与轴承保持架的干涉,电子部件配置在基板的两个面中的与轴承保持架相反的面上。或者在其他方式中,电子部件配置在基板的两个面中的与轴承保持架对置的面上,且基板与轴承保持架分离地配置。因此,难以使马达在轴向上小型化。
技术实现要素:
5.本实用新型鉴于上述问题点,其目的之一在于提供一种马达,该马达具有能够使马达在轴向上小型化的轴承保持架。
6.本实用新型的第一方式提供一种马达,其特征在于,该马达具有:马达部,其具有以中心轴线为中心进行旋转的轴;筒状的壳体主体,其设置有收纳所述马达部的马达部收纳空间;轴承,其支承所述轴的轴向一侧的端部;以及轴承保持架,所述轴承保持架具有:筒状部,其保持所述轴承;以及多个腿部,该多个腿部从所述筒状部向径向外侧延伸,从轴向观察时,设置在所述腿部彼此之间的间隙与所述马达部收纳空间重叠。
7.本实用新型的第二方式的马达的特征在于,在第一方式的马达中,在马达的轴向一侧具有控制基板,安装在所述控制基板的轴向另一侧的面上的安装部件的一部分配置在所述间隙中。
8.本实用新型的第三方式的马达的特征在于,在第一方式或第二方式的马达中,所述轴承保持架具有固定部,该固定部设置在所述腿部的前端且从轴向观察时与所述壳体主体的收纳筒部重叠,在所述固定部设置有供固定螺钉通过的贯通孔。
9.本实用新型的第四方式的马达的特征在于,在第一方式的马达中,该马达具有传感器基板,该传感器基板具有检测所述马达的旋转的旋转传感器,所述轴在轴向一侧的端部具有传感器磁铁,所述旋转传感器与所述传感器磁铁对置地设置,所述轴承保持架具有保持所述传感器基板的传感器保持部。
10.本实用新型的第五方式的马达的特征在于,在第四方式的马达中,所述传感器保持部设置于所述腿部,所述腿部配置在比所述轴承靠轴向一侧的位置。
11.本实用新型的第六方式的马达的特征在于,在第一方式的马达中,所述腿部具有弯折部。
12.本实用新型的第七方式的马达的特征在于,在第一方式的马达中,所述筒状部具有:保持筒部,其从径向外侧包围所述轴承;以及锥形筒部,其与所述保持筒部相连并随着朝向径向外侧而向轴向一侧倾斜。
13.本实用新型的第八方式的马达的特征在于,在第一方式的马达中,所述轴承保持架具有沿周向排列的4个所述腿部。
14.根据本实用新型,提供一种马达,该马达具有能够使马达在轴向上小型化的轴承保持架。
附图说明
15.图1是一个实施方式的泵装置的剖视图。
16.图2是一个实施方式的泵装置的局部分解俯视图。
17.图3是一个实施方式的轴承保持架的立体图。
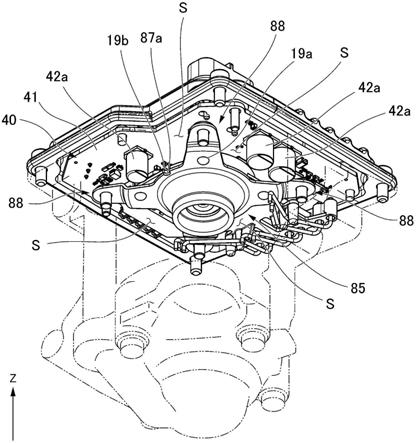
18.图4是示出一个实施方式的轴承保持架的配置状态的局部透视立体图。
19.标号说明
20.10:马达;12:壳体主体;12a:收纳筒部;15:传感器基板;15b:旋转传感器;20:马达部;21m:传感器磁铁;22:轴;36:第1轴承;40:控制基板;42a:在轴向上高度较高的部件(安装部件的一部分);85:轴承保持架;86:筒状部;86a:保持筒部;86d:锥形筒部;88:腿部;88a:传感器保持部;88b:弯折部;88c:固定部;88h:贯通孔;89:固定螺钉;c:马达部收纳空间;j:中心轴线;s:间隙。
具体实施方式
21.以下,参照附图对本实用新型的实施方式的马达10进行说明。在附图中,适当示出xyz坐标系作为三维正交坐标系。在xyz坐标系中,z轴方向为与后面说明的中心轴线j的轴向平行的方向。x轴方向为与z轴方向垂直的方向。y轴方向为与x轴方向和z轴方向双方垂直的方向。
22.在以下的说明中,将z轴方向的正侧(+z侧)称为“上侧”或“轴向一侧”,将z轴方向的负侧(-z侧)称为“下侧”或“轴向另一侧”。另外,上侧和下侧只是为了说明而使用的方向,并不限定马达10和泵装置1使用时的姿势。另外,只要没有特别说明,将与中心轴线j平行的方向(z轴方向)简称为“轴向”,将以中心轴线j为中心的径向简称为“径向”,将以中心轴线j为中心的周向、即绕中心轴线j的方向简称为“周向”。并且,在以下的说明中,“俯视”是指从轴向观察的状态。
23.<泵装置>
24.图1是泵装置1的沿图2中的i-i线的剖视图。本实施方式的泵装置1吸入水、油等流体并排出。泵装置1例如具有使流体在流路中循环的功能。泵装置1例如搭载于车辆的驱动装置。
25.如图1所示,泵装置1具有马达10和与马达10连接并由马达10驱动的泵机构90。
26.<马达>
27.马达10具有壳体11、马达部20、控制基板40、传感器基板15、轴承保持架85以及连接器80。
28.<壳体>
29.壳体11具有壳体主体12和罩13。即,马达10具有壳体主体12和罩13。壳体主体12收纳马达部20。罩13紧固于壳体主体12的上侧的端部。罩13封闭壳体主体12的上侧的开口。壳体11收纳马达部20、控制基板40、传感器基板15以及轴承保持架85。
30.壳体主体12具有收纳筒部12a和底壁部12e。收纳筒部12a呈沿轴向延伸的筒状。本实施方式的收纳筒部12a呈以中心轴线j为中心的圆筒状。在收纳筒部12a的内部设置有收纳马达部20的马达部收纳空间c和收纳传感器基板15及控制基板40的控制部收纳空间d。即,在筒状的壳体主体12设置有收纳马达部20的马达部收纳空间c。收纳筒部12a在上侧开口。收纳筒部12a的上侧的开口被罩13覆盖。底壁部12e位于收纳筒部12a的下端部。底壁部12e从下侧覆盖马达部收纳空间c。在底壁部12e设置有轴承保持部12d。轴承保持部12d保持马达部20的第2轴承37。
31.罩13呈主要沿着与中心轴线j垂直的方向延伸的板状。罩13封闭壳体主体12的上侧的开口。另外,罩13从上侧覆盖控制基板40。在罩13设置有沿上下方向贯通的开口部13a。在开口部13a配置有连接器80。
32.<马达部>
33.马达部20具有以中心轴线j为中心进行旋转的转子21、在径向上与转子21对置的定子26、第1轴承36以及第2轴承37。即,马达10具有第1轴承36。马达部20例如是三相交流马达。
34.转子21具有轴22、转子铁芯23以及磁铁24。即,马达部20具有以中心轴线j为中心进行旋转的轴22。转子21在轴22的下端部处与泵机构90连接,向泵机构90传递动力。
35.轴22以中心轴线j为中心而沿上下方向延伸。轴22被第1轴承36和第2轴承37支承为能够旋转。第1轴承36位于转子铁芯23的上侧,第2轴承37位于转子铁芯23的下侧。即,第1轴承36支承轴22的轴向一侧的端部,第2轴承37支承轴22的轴向另一侧的端部。
36.在轴22的下端部设置有密封轴部22d和连结轴部22e。密封轴部22d位于第2轴承37的下侧。在密封轴部22d的外周面配置有密封部件32。密封部件32将泵机构90侧与马达部收纳空间c之间密封。连结轴部22e位于密封轴部22d的下侧。连结轴部22e与泵机构90的驱动部90a连结。
37.在轴22的上端部经由固定部件22h而安装有传感器磁铁21m。即,轴22在轴向一侧的端部具有传感器磁铁21m。传感器磁铁21m呈圆环状。传感器磁铁21m是沿周向交替磁化的永磁铁。传感器磁铁21m与转子21一起绕中心轴线j旋转。
38.转子铁芯23固定在轴22的外周面。转子铁芯23呈以中心轴线j为中心而沿周向延伸的环状。磁铁24固定在转子铁芯23上。磁铁24设置有多个。多个磁铁24绕中心轴线j等间隔地排列。
39.定子26配置在转子21的径向外侧。定子26具有定子铁芯27、多个绝缘件28以及多个线圈29。
40.定子铁芯27具有以中心轴线j为中心的圆环状的铁芯背部27a和从铁芯背部27a的内周端向径向内侧延伸的多个齿部27b。多个齿部27b沿周向相互隔开间隔地配置。齿部27b的径向内侧面从径向外侧隔开间隙地与磁铁24的径向外侧面对置。
41.线圈29由卷绕成多层的线圈线构成。多个线圈29分别经由绝缘件28而安装在齿部
27b上。线圈线的端部作为引出线29a而被引出到定子26的上侧。引出线29a与控制基板40连接。从控制基板40向线圈29提供交流电流。
42.<传感器基板>
43.传感器基板15位于轴承保持架85的上侧。在本实施方式中,传感器基板15经由传感器基板保持件19而固定在轴承保持架85上。传感器基板15具有传感器基板主体15a和旋转传感器15b。传感器基板保持件19例如是由树脂构成的部件。传感器基板保持件19具有固定销19a。另外,如图4所示,在传感器基板保持件19设置有从外缘向径向外侧延伸的缺口部19b。传感器基板15也可以不经由传感器基板保持件19而通过其他手段固定在轴承保持架85上5。
44.传感器基板主体15a沿着与中心轴线j垂直的平面延伸。旋转传感器15b安装于传感器基板主体15a的下表面。旋转传感器15b配置在中心轴线j上。即,旋转传感器15b以与传感器磁铁21m的正上方对置的方式配置。旋转传感器15b检测转子21的旋转角。即,旋转传感器15b检测马达10的旋转。传感器基板15经由省略图示的连接线与控制基板40连接。
45.<控制基板>
46.控制基板40配置在马达部20、轴承保持架85以及传感器基板15的上侧。即,马达10在马达10的轴向一侧具有控制基板。控制基板40通过固定螺钉89而固定于壳体主体12。
47.在控制基板40上连接有从定子26的线圈29延伸出的引出线29a。由此,控制基板40与马达部20电连接。控制基板40将从外部电源提供的电力提供到马达部20的定子26。控制基板40根据从传感器基板15接收到的转子21的旋转角的信息,控制向马达部20提供的电流。
48.控制基板40具有基板主体41和安装在基板主体41上的多个元件42。在俯视时,基板主体41为多边形状。基板主体41沿着与中心轴线j垂直的平面延伸。多个元件42例如是场效应晶体管(field effect transistor,fet)、预驱动器以及低损耗型线性调节器(low drop-out regulator,ldo)、电容器等。
49.<轴承保持架>
50.轴承保持架85位于马达部20的上侧。轴承保持架85从上侧覆盖马达部收纳空间c。如图1所示,轴承保持架85在壳体11的内部配置于马达部收纳空间c与控制部收纳空间d的边界部。轴承保持架85保持第1轴承36。在本实施方式中,轴承保持架85是金属制的部件,优选通过钣金加工来制造。
51.图2是一个实施方式的泵装置1的局部分解俯视图。更详细而言,图2以泵装置1中的比轴承保持架85靠上方的部件被取下的状态进行图示。图3是一个实施方式的轴承保持架的立体图。图4是示出一个实施方式的轴承保持架85的配置状态的局部透视立体图。更详细而言,图4以透视泵装置1中的比轴承保持架85靠下方的部件的状态进行图示。
52.如图3所示,轴承保持架85具有筒状部86、凸缘部87以及多个腿部88。筒状部86以中心轴线j为中心而配置。多个腿部88从筒状部86向径向外侧延伸。凸缘部87设置在多个腿部88彼此之间。凸缘部87从筒状部86向径向外侧延伸。
53.筒状部86保持第1轴承36。筒状部86具有保持筒部86a和从保持筒部86a向径向外侧延伸的锥形筒部86d。保持筒部86a从径向外侧包围第1轴承36。
54.保持筒部86a具有包围第1轴承36的径向外侧的圆筒壁部86b和从轴向一侧与第1
轴承36接触的圆环底部86c。圆筒壁部86b为以中心轴线j为中心的圆筒形。在本实施方式中,轴承保持架85通过钣金加工来制造,圆筒壁部86b具有在径向上折叠并在下端部处相连的双层结构。这样的构造能够利用廉价的钣金来制造,从而在能够确保足够的刚性的同时抑制轴承的振动。
55.在轴承保持架85上设置有沿上下方向贯通的中央孔85h。中央孔85h为以中心轴线j为中心的圆形。圆环底部86c是以中心轴线j为中心的圆环状且板状的部分,以包围中央孔85h的方式设置。在中央孔85h中通入有轴22的上端部。由此,传感器磁铁21m配置在第1轴承36的上侧且配置在锥形筒部86d的径向内侧。
56.锥形筒部86d随着朝向上侧而向径向外侧倾斜。锥形筒部86d连接保持筒部86a和腿部88。另外,在腿部88彼此之间的区域中,锥形筒部86d连接保持筒部86a和凸缘部87。因此,腿部88配置在比第1轴承36靠轴向一侧的位置。锥形筒部86d为锥状,由此刚性提高。另外,能够将作为轴的上侧的空间的控制部收纳空间d确保得更宽。由此,能够更容易地配置传感器磁铁21m和旋转传感器15b。
57.凸缘部87从锥形筒部86d的外缘向径向外侧延伸。凸缘部87与后述的传感器保持部88a配置在同一平面上,载置有传感器基板保持件19。另外,在凸缘部87上,以沿轴向观察时与传感器基板保持件19的缺口部19b在周向的相同位置处重叠的方式设置有相同形状的缺口部87a。缺口部19b和87a在组装工序中能够容易地进行周向的定位。
58.腿部88从锥形筒部86d的外缘向径向外侧延伸。在本实施方式中,轴承保持架85具有沿周向排列的4个腿部88。如图2所示,设置在腿部88彼此之间的间隙s是比凸缘部87靠径向外侧的空间。从轴向观察时,设置在腿部88彼此之间的间隙s与马达部收纳空间c重叠。如图4所示,安装在基板主体41上的多个元件42中的、安装在控制基板40的轴向另一侧的面上的安装部件的一部分配置在间隙s中。在本实施方式中,安装部件的一部分是指电容器等在轴向上高度较高的部件42a。
59.腿部88具有传感器保持部88a、弯折部88b以及固定部88c。即,轴承保持架85具有传感器保持部88a。传感器保持部88a、弯折部88b、固定部88c从径向内侧朝向外侧依次排列。
60.如图1所示,传感器保持部88a保持传感器基板15。更详细而言,保持传感器基板15的传感器基板保持件19载置于传感器保持部88a上。在本实施方式中,在传感器保持部88a上分别设置有1个贯通孔88i。另一方面,在保持传感器基板15的传感器基板保持件19设置有向下侧延伸的固定销19a。固定销19a插入至贯通孔88i中并对前端进行热压接。传感器基板保持件19固定在轴承保持架85上。由此,传感器基板15被固定在传感器保持部88a的上方。另外,安装于传感器基板15的下表面的旋转传感器15b在锥形筒部86d的径向内侧与传感器磁铁21m对置地配置。
61.腿部88在弯折部88b处弯折成台阶状而成型。弯折部88b沿着周向延伸。因此,传感器保持部88a和固定部88c所配置的高度互不相同。固定部88c配置在比传感器保持部88a靠上侧的位置。
62.固定部88c设置在腿部88的前端。即,轴承保持架85具有固定部88c。腿部88在固定部88c处被螺钉固定在壳体主体12上。在固定部88c设置有供固定螺钉89通过的贯通孔88h。从轴向观察时,固定部88c与壳体主体12的收纳筒部12a重叠。
63.根据本实施方式,从轴向观察时,设置在轴承保持架85的腿部88彼此之间的间隙s与马达部收纳空间c重叠。如图2所示,从轴向一侧观察时,定子26经由间隙s而露出到控制部收纳空间d。因此,能够将从定子26引出的引出线29a经由间隙s而容易地配设在控制部收纳空间d侧。其结果为,能够简化将引出线29a与控制基板40连接时的引出线29a的布线工序。
64.根据本实施方式,安装在控制基板40的轴向另一侧的面上的安装部件的一部分配置在间隙s中。通过该结构,能够在避免电容器等在轴向上高度较高的部件42a与轴承保持架85的干涉的状态下,使控制基板40与轴承保持架85的轴向距离更接近。
65.根据本实施方式,轴承保持架85具有固定部88c。固定部88c设置在腿部88的前端。另外,从轴向观察时,固定部88c与壳体主体12的收纳筒部12a重叠。在固定部88c设置有供固定螺钉89通过的贯通孔88h。通过该结构,固定螺钉89将固定部88c相对于收纳筒部12a固定。由于收纳筒部12a在轴向上具有足够的厚度,因此能够充分确保固定螺钉89的过盈量。
66.根据本实施方式,轴承保持架85具有保持传感器基板15的传感器保持部88a。通过该结构,与将传感器基板15直接固定在控制基板40上的结构相比,能够更容易地将传感器磁铁21m和旋转传感器15b配置在期望的相对位置,并且能够更稳定地进行固定。
67.根据本实施方式,传感器保持部88a设置于腿部88。腿部88配置在比第1轴承36靠轴向一侧的位置。通过该结构,能够在比轴承保持架85的筒状部86靠上方的位置配置传感器基板15和固定部88c。因此,即使在使第1轴承36与马达部20在轴向上更接近的情况下,也能够容易地使引出线29a从定子26向控制基板40通过。
68.根据本实施方式,腿部88具有弯折部88b。通过该结构,腿部88相对于以与弯折部88b垂直的方向为轴的扭转的刚性提高。
69.根据本实施方式,筒状部86具有从径向外侧包围第1轴承36的保持筒部86a和与保持筒部86a相连且随着朝向径向外侧而向轴向一侧倾斜的锥形筒部86d。通过该结构,能够增大轴承保持架85的刚性。并且,通过设定锥形筒部86d的倾斜,能够设计成使轴承保持架85与引出线29a、传感器基板15以及在轴向上高度较高的部件42a不发生干涉且使马达10在轴向上小型化。
70.根据本实施方式,轴承保持架85具有沿周向排列的4个腿部88。根据该结构,能够将轴承保持架85稳定地固定在壳体主体12上。
71.<连接器>
72.连接器80配置在控制基板40的上侧并与控制基板40连接。从轴向观察时,连接器80的至少一部分与控制基板40重叠。连接器80经由罩13的开口部13a而配置在壳体11的内外。即,连接器80的一部分向壳体11的外部露出。在连接器80上连接有从外部装置延伸的多个电源线和多个信号线。
73.<泵机构>
74.泵机构90具有驱动部90a和泵罩95。驱动部90a配置在马达部20的下侧。驱动部90a与轴22的连结轴部22e连结。驱动部90a由马达部20的动力驱动,吸引和排出流体。作为驱动部90a的构造,例示出次摆线泵构造、叶片泵构造等。泵罩95固定在壳体主体12的下侧。泵罩95从下侧覆盖驱动部90a。
75.以上,对本实用新型的实施方式和变形例进行了说明,但实施方式和变形例中的
各结构及它们的组合等是一个例子,在不脱离本实用新型的主旨的范围内,能够进行结构的附加、省略、置换以及其他变更。另外,本实用新型并不受实施方式限定。
76.例如,在本实施方式中,记载了在泵机构90上连接有马达10的泵装置1,但本实用新型的方式不限于泵装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1