运输装置的制作方法
1.本发明涉及一种平面马达形式的运输装置,所述运输装置具有至少一个运输分段和至少两个运输单元,所述至少一个运输分段构造运输平面,所述运输单元在所述运输平面中能够彼此独立地至少二维地运动,其中,在所述运输分段上布置有驱动线圈或能运动的永磁体并且在所述运输单元上布置有驱动磁体,或者反之亦然,其中,所述驱动线圈或所述能运动的永磁体与所述驱动磁体磁性地配合作用,以使得所述运输单元运动。此外,本发明涉及一种用于呈平面马达形式的运输装置的运输单元以及一种用于运行这种运输装置的方法。
背景技术:
2.平面马达原则上在现有技术中已知。平面马达基本具有通常由一个或多个运输分段构造的运输平面,在该运输平面中一个或多个运输单元可以至少二维地运动。通过运输分段和运输单元的磁场的配合作用产生作用在运输单元上的驱动力。为了使所述运输单元沿确定的运动方向运动,必须使至少一个磁场、即所述运输分段和/或所述运输单元的磁场随时间变化,以便跟随所述运输单元的运动。然而通常只有一个磁场、通常在运输分段上的磁场在时间上是可变的,并且相应的另外的磁场、通常是运输单元上的磁场通常是恒定的。us 9 202 719 b2例如公开了这种平面马达的基本结构和工作方式。
3.时间上可变的磁场例如可以通过线圈(电磁体)或运动的(例如旋转的)永磁体产生,它们不仅可以布置在运输单元上而且可以布置在运输分段上。线圈通常也被称为驱动线圈。时间上不变的、也就是恒定的磁场典型地借助于永磁体产生。通常,这些部件被称为驱动磁体。它们也可以根据平面马达的实施方式既布置在运输单元上也布置在运输分段上。由于更简单的操控,驱动线圈常常布置在平面马达的运输分段上并且驱动磁体布置在运输单元上。
4.驱动线圈通常由控制单元操控,以便产生沿期望的运动方向的运动的磁场。驱动磁体至少二维分布地布置在运输单元上,该驱动磁体与运动的磁场配合作用,从而能够沿所述运输单元的运动自由度(最大三个平移运动自由度和三个旋转运动自由度)的方向任意地将预设的力和力矩施加到所述运输单元上。引起运输单元在运动自由度中的一个运动自由度的方向上运动的力和力矩通常被称为驱动力。由运输分段施加到运输单元上的用于保持当前运动状态的力和力矩通常被称为悬浮力。通过悬浮力例如可以在运输单元和运输分段之间产生并保持气隙和/或补偿工艺力或工艺力矩。即使在未水平取向的运输平面的情况下例如也可以通过相应的悬浮力使运输单元的位置保持恒定。
5.为了能够实现运输单元的针对平面马达特有的二维运动,需要运输分段和运输单元的磁场的二维配合作用,其中,两个磁场中的一个磁场必须在至少两个维度上或两个磁场必须在至少一个维度上是时间可变的。在此有利地这样布置驱动线圈和驱动磁体,使得除了沿着由运输平面撑开的轴线的一维运动外,也可以实现运输单元在运输平面中的复杂的二维运动。当驱动线圈和驱动磁体有利地布置成运输单元可以在所有六个自由度的方向
上借助驱动力和悬浮力被引导和运动时,可省去机械引导。在这种情况下常常提到无轴承的平面马达。
6.平面马达例如可以用作生产过程中的运输装置,其中,可以实现具有复杂运动曲线的非常灵活的运输过程。在ep 3 172 156 b1和ep 3 172 134 b1中例如示出平面马达作为运输装置的这种应用。wo 2018/176137 a1公开了一种平面马达形式的运输装置,其中,运输单元借助于相对复杂的机械结构彼此固定连接。机械结构用作一种类型的操纵装置。通过运输单元的相对运动,操纵装置被操纵,例如以便实施垂直的提升运动。互相连接的运输单元的相对运动通过机械连接来限制,从而这些运输单元不再能够单独地运动。
7.在迄今为止已知的平面马达中,运输单元可以以所有六个运动自由度运动(沿三个空间轴线的平移以及围绕三个空间轴线的旋转)。在此通常使用两个自由度(在运输平面中的平移)作为主运动方向,该主运动方向允许基本不受限制的运动。其余的四个运动方向仅能受限地(直至一定的偏移)实现。两个主运动方向在迄今为止的平面马达中被视为是等效的,因为运输单元在两个主运动方向上的运动被视为是相同重要的。这种情况也反映在运输单元的设计中。因此已知的平面马达大多使用相同大小的方形的穿梭体,穿梭体的基面是方形的或者矩形的。被运输的对象在此优选布置在运输单元的几何重心中或附近,以便在运动时将尽可能少的干扰性的动态力和力矩施加到运输单元上。
8.但是在生产过程的范围内运输对象时,通常存在预设的主工艺流动方向,被运输的对象在该主工艺流动方向中运动。例如对象在工作站之间运动,在工作站中对被运输的对象执行特定的工艺步骤。因此主工艺流动方向通常被认为是更高优先级的。此外可能存在下级的副工艺流动方向,例如对象在工作站内的运动或有缺陷的对象从主工艺流动方向、例如横向于主工艺流动方向的取出。
9.在生产过程的范围中运输对象时通常期望的是,至少区段式地能够实现所运输的对象在主工艺流动方向中的尽可能大的吞吐量。该要求也可以仅仅是临时的(在特定的工艺区段中,例如在处理站、具有低速度的区段中)。因此为了提高运输过程的吞吐量,希望在产品流动方向上的两个被运输的对象的尽可能小的距离。然而,利用运输单元的先前的方形设计受到限制,这是由于当运输单元彼此直接邻接时,两个对象之间的最小距离(分别处于中点处)大致对应于方形运输单元的边长。
10.通过具有矩形基面的运输单元(所述运输单元在运动方向上看具有比在横向方向上更小的长度),原则上虽然与方形的运输单元相比对象距离可减小,然而在这种情况下在减小对象距离方面受到限制,这是由于不能或不应低于运输单元的一定的最小长度。其原因在于,尤其在动态的运动过程中(例如在运动方向上的大的加速度或减速度的情况下)与所述运输单元的重心在高度方向上(尤其包括连同由此所运输的对象)的高的重心距离相关联地产生相对大的俯仰力矩,所述俯仰力矩必须由所述运输单元来承受。因此,为了防止运输单元倾翻,必须通过平面马达产生相应的与这些俯仰力矩反向定向的反力矩。因此为了产生这些反力矩需要沿运动方向与重心有一定的杠杆距离,因此需要一定的最小长度。
技术实现要素:
11.因此本发明的任务是,在呈平面马达形式的运输装置中以简单的方式至少暂时地提高所运输的对象的吞吐量,而不会不利地影响所述运输单元的运动。
12.根据本发明,所述任务通过在至少两个运输单元上分别设置至少一个嵌接区段来实现,其中,所述至少两个运输单元在所述运输平面中能沿运动方向彼此相继地运动到嵌接位置中,在所述嵌接位置中各所述运输单元的嵌接区段至少部分地嵌接,其中,所述嵌接区段被构造成在所述嵌接位置中至少沿所述运动方向重叠,使得所述运输单元沿运动方向的总延伸尺寸小于各所述运输单元沿所述运动方向的各个运输单元延伸尺寸的总和。由此,运输单元能够基本运动到彼此中,从而在与迄今已知的运输单元相同的延展的情况下能够减小在所述运输单元上运输的两个对象的距离。尤其是在使用多个具有在嵌接位置中的嵌接区段的运输单元时,由此可以至少区段式地相对于传统的运输单元提高吞吐量。
13.嵌接区段也可以被构造成在嵌接位置中在法向于运输平面的方向上重叠。由此,例如也可以使用具有矩形基面的运输单元,所述运输单元的嵌接区段部分地彼此叠置。
14.优选地,嵌接区段被构造成互补的。由此,这些形状相互补充并且所述运输单元可以在嵌接位置中彼此非常靠近并且基本形状配合地定位。
15.优选地,在所述至少两个运输单元中的至少一个运输单元上设置有至少两个嵌接区段,其中,所述嵌接区段优选地布置在相应的运输单元的相对置的侧或相邻接的侧上。所述至少两个嵌接区段在此能够构造成相同类型的或互补的。由此,可以提高灵活性,因为多个运输单元可以彼此相继地被置于嵌接位置中。在相对置侧上的互补的嵌接区段是有利的,以便将多个相同实施的运输单元彼此相继地带入嵌接位置中。
16.所述至少两个运输单元优选分别具有投影到运输平面上的基面以及最小地包围基面的矩形面,其中,所述至少两个运输单元的最小包围的矩形面在所述嵌接位置中相叠。优选地,相应运输单元的最小包围的矩形面和基面之间的比例最大为2,优选最大为1.5,并且优选最小为1.1。由此可以确保,提供足够大的面积用于布置驱动磁体,并且尽管如此仍可以形成足够大的嵌接区段。
17.所述任务还通过一种运输单元通过以下方式实现,在所述运输单元上设置至少一个嵌接区段,所述嵌接区段被构造用于当所述运输单元和另外的运输单元在所述运输平面中沿运动方向彼此相继运动到嵌接位置中时与所述另外的运输单元的嵌接区段至少部分地嵌接,其中,所述运输单元的所述嵌接区段被构造用于在所述嵌接位置中与所述另外的运输单元至少沿运动方向与所述另外的运输单元的所述嵌接区段如此重叠,使得所述运输单元沿运动方向的总延伸尺寸小于所述运输单元沿运动方向的各个延伸尺寸的总和。
18.此外,所述任务利用一种方法解决,其方式为:所述至少两个运输单元在所述运输平面中沿运动方向如此彼此相继运动,使得所述至少两个运输单元至少沿所述运动方向如此重叠,使得所述运输单元沿所述运动方向的总延伸尺寸小于所述运输单元沿所述运动方向的各个运输单元延伸尺寸的总和。通过该方法也可以使具有方形基面的传统运输单元以有利的方式在运输平面中运动,以便至少区段式地提高对象的吞吐量。
19.有利地,至少三个运输单元在所述运输平面中沿所述运动方向彼此相继地运动,使得每两个彼此接连的运输单元至少沿所述运动方向以如下方式重叠,使得所述运输单元沿所述运动方向的总延伸尺寸小于所述运输单元沿所述运动方向的各个运输单元延伸尺寸的总和,其中,利用所述至少三个运输单元中的每个运输单元运输对象,其中,所述对象以如下方式定位在所述运输单元上,使得在各所述对象之间沿运动方向的平均对象距离最大等于所述至少三个运输单元沿运动方向的平均运输单元延伸尺寸,优选最大等于所述平
均运输单元延伸尺寸的三分之二。由此,在具有方形或矩形的基面的传统的运输单元中也可以通过如下方式增大吞吐量,即,对象偏心地放置在运输单元上。
20.优选地,所述运输单元在此这样相对于彼此定位并且所述对象相对于所述运输单元这样布置,使得所述对象沿运动方向处于一条直线上。这可能例如有利于保持对象和工作站之间的恒定距离。下面参照图1a至图6更详细阐述本发明,这些图示例性地、示意地并非限制性地示出本发明的有利的设计方案。
附图说明
21.在此,示出:
22.图1a和图1b以俯视图和侧视图示出运输装置;
23.图2a-2g分别以俯视图示出具有在嵌接位置中的不同嵌接区段的一对运输单元;
24.图3a+b分别以俯视图示出在两个不同嵌接位置中的三个运输单元;
25.图3c以侧视图示出在嵌接位置中的两个运输单元;
26.图4以俯视图示出用于执行运输过程的运输装置;和
27.图5以俯视图示出用于说明根据本发明的方法的运输装置;
28.图6以俯视图示出在备选的设计方案中的运输装置。
具体实施方式
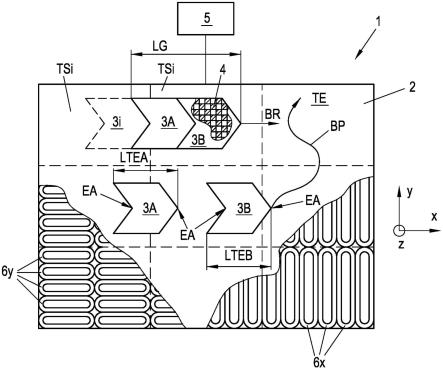
29.在图1a中以俯视图示出根据本发明的运输装置1的示例性的设计方案。图1b示出运输装置1的前视图。在运输装置1中设置有定子2,该定子构造运输平面te。在所示的示例中,运输平面te是具有竖轴线z、纵轴线x和横轴线y的水平平面。当然,其他布置也是可能的,例如竖直地或以一定角度倾斜。这基本取决于运输装置1的所期望的应用。在此,定子2由i个运输分段tsi构成,所述i个运输分段彼此邻接以便构造运输平面te。由此,定子2可以模块化地构建并且可以实现具有不同大小的面积的运输平面tei。当然,这种模块化结构仅是可选的,并且定子2也可以仅由单个结构组构造。一个或多个运输单元(下面一般性地设有附图标记3)能够在定子2的运输平面te中彼此独立地至少二维地运动。在所示出的示例中,这些是运输单元3a、3b。例如,仅在沿纵轴线x或横轴线y的轴向方向上的运动是可能的,或者具有y坐标和x坐标的二维运动曲线是可能的,如通过运输单元3b的运动曲线bp所示。在运输装置1的相应的实施方案中也可至少受限地应用另外四个运动自由度,即还有在竖轴线z的方向上或围绕竖轴线的平移以及旋转以及还有围绕x和y轴的一定的旋转。
30.在运输分段tsi上设置有驱动线圈6,所述驱动线圈由一个(或多个)平面马达控制单元5(硬件和/或软件)操控。作为驱动线圈6例如使用卷绕的导线线圈或者布置在电路板上的所谓的pcb线圈(pcb=printed circuit board印刷电路板)。电流可以被施加到驱动线圈6中,以便产生磁场。为此,可能需要的功率电子器件可以布置在平面马达控制单元5中或定子2上(例如在运输分段tsi上)。通过相应地操控彼此并排布置的驱动线圈6可以产生基本运动的磁场。驱动线圈6有利地如此布置在定子2上,使得磁场可以在任意的方向上在运输平面te中延伸,以便实现运输单元3的相应的运动曲线。在此,作为运输平面te不应理解为数学意义上的平面,而是理解为通过定子2限界的平坦的运输面,运输单元3能够在所述运输面上运动。驱动线圈6可以在定子2上布置在一个平面中,例如布置在多个分别错位
90
°
的线圈组中(见图2)或者以人字形布置(见例如:jansen,j.w.,2007。magnetically levitated planar actuator with moving magnets带有移动磁体的磁悬浮平面执行器。发表于:electromechanical analysis and design eindhoven:technische universiteit eindhoven机电分析与设计,埃因霍温,埃因霍温理工大学,doi:10.6100/ir630846)。然而,驱动线圈6也可以布置在彼此上下叠置的多个平面中,如将在下面阐述的。但是,代替驱动线圈6也可以以公知的方式在一个/多个运输分段tsi上设置(未示出的)能运动的永磁体。为了产生随时间变化的(运动的)磁场,永磁体可以由控制单元5操控,使得永磁体以确定的方式运动。在此,省略了详细的描述。
31.在运输单元3上分别布置有驱动磁体4,例如永磁体,这些驱动磁体与驱动线圈6配合作用,以便将驱动力施加到运输单元3上。因此,根据驱动线圈6的操控产生运动的磁场,所述磁场与驱动磁体4配合作用,以使运输单元3运动。在运行中,在平面马达2的驱动线圈6和运输单元3的驱动磁体4之间设置有气隙。除了在运输平面te中的二维运动外,运输单元3在高度方向上的一定的运动也是可能的,即,法向于运输平面te,在此在z方向上。因此,驱动线圈6也在z方向上产生(悬浮)力。通过驱动线圈6的相应的操控,能够以受限的程度提高和减小气隙,由此所述运输单元3能够沿高度方向运动。在高度方向上的可用的运动间隙的大小在此基本取决于运输装置1的结构设计方案,尤其是取决于驱动线圈6和驱动磁体4的最大可产生的磁场以及运输单元的质量和负载(例如取决于所运输的对象的重量)。根据运输装置1的大小和设计,可用的沿高度方向的运动区域例如可以在几毫米至几厘米的范围内。所述运输单元3a、3b也可以围绕z轴以及在限定的程度上也围绕y轴和x轴进行旋转运动。
32.在图1a和图1b中所示的示例中,驱动线圈6在z方向上相叠地布置在两层中。在第一层中,驱动线圈6y被定向成使得驱动线圈可以被用于在y方向和z方向上在运输单元3上形成力。在第二层中,驱动线圈6x被定向成使得驱动线圈可以被用于在x方向和z方向上在运输单元3上形成力。两个层基本完全在整个运输平面te上延伸,以便形成用于运输单元3的尽可能大的运动区域。在所示出的示例中,与如在图1b中可见的具有驱动线圈6x的第二层相比,具有驱动线圈6y的第一层在z方向上更靠近表面并且因此更靠近运输单元3。当然,这仅是示例性的并且布置可以是相反的。驱动线圈6x和6y也不必彼此正交地取向。也还可以设置驱动线圈6的一个或多个另外的层。此外,一层的驱动线圈6可以以相对于驱动线圈6的任意角度布置在相邻层中。然而,驱动线圈6的整体允许在x和y方向上的运动。驱动线圈6优选地实施为所谓的无铁芯的空心线圈,以便减小或避免在运输单元3和运输分段tsi之间的永磁吸引力。由此,运输单元3通过驱动磁体4不太强烈地被朝向运输平面te的方向吸引。
33.在所示的示例中,可以省去运输单元3的外部支承。运输单元3纯粹通过由运输单元3的驱动磁体4和运输分段tsi的驱动线圈6产生的磁(悬浮)力而悬浮,该磁(悬浮)力在此沿z方向作用。然而,驱动线圈6与驱动磁体4之间的期望气隙不一定必须以纯磁方式产生或维持,而是运输单元3也可以以任何其他方式支承。为此,例如任何合适的机构可以配合作用,例如机械的、磁的、电磁的、气动的等。在所示的示例中设置平面马达控制单元5,利用所述平面马达控制单元可以操控定子2的驱动线圈6。平面马达控制单元5例如也可以与(未示出的)上级的控制单元连接,例如以便共同控制和同步多个运输装置1。但是,平面马达控制单元5当然也可以集成在上级控制单元中。也可以规定,对于每个运输分段tsi或运输分段
tsi的一个组,分别设置段控制单元(硬件和/或软件),该段控制单元也可以集成在平面马达控制单元5或上级控制单元中或可以构造为单独的单元。平面马达控制单元5和/或上级控制单元例如可以连接到未示出的用户接口、例如计算机上,通过所述用户接口可以控制运输单元1。通过平面马达控制单元5和/或上级控制单元能够使运输单元3的运动曲线彼此同步或者彼此协调,例如以便避免运输单元3或由其运输的对象的碰撞。实现运输单元3的期望的运动曲线的控制程序在平面马达控制单元5上运行。但是,平面马达的结构和工作方式原则上是已知的,因此在此不进行详细描述。在此要注意,所述结构仅仅是示例性的并且当然也可以相反地实施。驱动线圈6或能运动的永磁体也可以布置在运输单元3上并且驱动磁体4可以布置在定子2上。在这种情况下,在运输单元3上设置用于操控驱动线圈6或能运动的永磁体的能量供应部。然而,在此,运输装置的基本工作方式没有变化。
34.运输单元3具有带有确定的基面的基体9。在运行中,面向运输平面te的下侧上以已知的方式布置有驱动磁体4。在基体9的对置的上侧上,例如可以布置有待运输的对象o。原则上,在驱动磁体4的已知的1d布置和2d布置之间进行区分。在1d布置中,驱动磁体4被分成磁体组,类似于运输分段tsi上的驱动线圈6。在每个磁体组中设置有确定数量的长形的驱动磁体4,其中,驱动磁体4并排布置并且不同磁极或磁化方向的驱动磁体4交替。一个磁体组的驱动磁体4在几何形状上与相应的另外的磁体组的驱动磁体4不同地定向。
35.已知的halbach布置也证实为有利的,其中,相邻的驱动磁体4的磁化方向分别彼此旋转90
°
。但是,通常一个磁体组内的相邻的驱动磁体4的磁化方向也可以相对彼此旋转另外的角度,例如45
°
。halbach布置具有的优点是,在磁体组的一侧(优选地,面向运输平面te的一侧)的磁通量大于在相对置侧上的磁通量。如果磁体组中的一些驱动磁体4的磁体宽度和磁体高度相应地适配,例如如果磁体组中的相应最外侧驱动磁体4具有比磁体组中的中间驱动磁体4减小的磁体宽度,尤其是具有一半的磁体宽度,则可以实现磁体组的磁场的特别有利的正弦磁场图。
36.优选地,相邻磁体组的驱动磁体4彼此成90度的角度。通过各个磁体组与根据图1a和图1b的设计方案的驱动线圈6y配合作用,一个定向的磁体组例如可以设置用于使运输单元3沿y方向运动。具有相应其他定向的磁体组能够以类似的方式被设置用于使运输单元3沿x方向运动。为此,磁体组可以与根据图1a和图1b的设计方案的驱动线圈6x配合作用。当运输单元3旋转90度时,磁体组与相应的其他线圈组的驱动线圈配合作用。
37.在2d布置中,不同极性或磁化方向的各个驱动磁体4棋盘状地布置,如通过在图1a中的运输单元3b处的不同阴影线示出的那样。由此,能够实现运输单元3的更灵活的基面,因为能够非常灵活地将2d布置的驱动磁体4分组。然而,当然所示的1d和2d布置仅被认为是示例性的并且应当理解可以存在1d和2d布置的大量不同的可能性。但是,驱动磁体的具体实施方案对于本发明也不重要,因此在下面不再进一步描述。
38.根据本发明,在运输装置1中设置有至少两个运输单元3a、3b,其中,分别在运输单元3a、3b上设置有至少一个嵌接区段ea。但当然也可以设置其他(未示出的)运输单元3i,在这些运输单元上以类似的方式设有至少一个嵌接区段ea。当然,任意不同地设计的运输单元3i也可以附加地设置在运输装置1中。至少两个运输单元3a、3b可以在运输平面te中沿运动方向br彼此相继地运动到嵌接位置中,在该嵌接位置中,运输单元3a、3b的嵌接区段ea至少部分地嵌接。嵌接位置在图1a的上部区域中示出,其中,共同的运动方向br在此是x方向。
由于运输单元3a、3b在运输平面te中的至少二维的运动可能性,当然也能够实现在运输平面te中的每个其他的运动方向br。
39.嵌接区段ea被构造成使得这些嵌接区段在嵌接位置中至少沿运动方向br以如下方式重叠,即,运输单元3a、3b沿运动方向br的总延伸尺寸lg小于运输单元3a、3b沿运动方向br的各个运输单元延伸尺寸ltea、lteb的总和。运输单元延伸尺寸在此理解为运输单元沿运动方向br的总长度。优选地,运输单元3a的至少一个嵌接区段ea构造成与相应其他的运输单元3b的至少一个嵌接区段ea互补的。在所示的示例中,运输单元3a的右嵌接区段ea与右运输单元3b的左嵌接区段ea互补地构造。“互补”在此理解为嵌接区段ea相反地成形,从而嵌接区段基本彼此补充,例如凹/凸,或者如图所示以箭头状凸起和箭头状缺口的形式。下面借助于图2a至图2g还要更详细描述另外的变型方案。由此,运输单元3a、3b能够在嵌接位置中非常靠近彼此地运动,而在运输单元3a、3b之间不存在缝隙。运输单元3a、3b由此可基本形状配合地运动到彼此中。
40.当然该图示仅应理解为用于说明本发明的原理的示例。当然优选地,以类似的方式,两个以上的运输单元3a、3b、...3i彼此相继运动到嵌接位置中,如图1a中的虚线所示。由此,与具有正方形基面和相同的运输单元延伸尺寸的传统的运输单元相比,能够提高在运动方向br上被运输对象的吞吐量,因为在运动方向br上减小了被运输对象之间的平均对象距离。平均对象距离oam从得到,其中oai是相应两个彼此相继布置的运输单元3的对象o之间的对象距离,并且n是处于嵌接位置中的运输单元3的数量。
41.在图1a中示出的示例中,运输单元3a、3b部分地在运动方向br上重叠并且完全在法向于运动方向br的方向(在此为y方向)上重叠,从而所述运输单元3a、3b的侧棱边对齐。当然,也可以采用其他类型的重叠。例如互补的嵌接区段ea可以构造成使得这些嵌接区段在嵌接位置中不仅沿运动方向br重叠,而且还沿法向于运输平面的方向(在此沿z方向,如在图3c中所示)重叠。备选地或附加地,例如当互补的嵌接区段ea如在图3a和图3b中所示构造在其中时,错位的嵌接位置也是可能的。
42.在运输单元3a、3b上可以分别设置仅一个嵌接区段ea,如例如在图2g中所示,但是优选在运输单元3a、3b上设置多个嵌接区段ea,例如在相应的运输单元3a、3b的相对置侧上设置两个嵌接区段ea,如在图1a和图2a至图2f中所示。这有利于使多个运输单元3i沿运动方向br彼此相继地进入嵌接位置,如例如在图4中所示。当多个嵌接区段ea布置在运输单元3a上时,这些嵌接区段优选互补地构造,例如在图1a中所示。由此,能够使用相同的运输单元3a、3b。当在运输单元3a、3b上设置多个嵌接区段ea时,这些嵌接区段也可以布置在相应的运输单元3a、3b的彼此邻接的侧面上,例如围绕竖轴线彼此错位90
°
,如这例如在图2e中示出的具有十字形基面的运输单元3a、3b上是这种情况。这些运输单元3a、3b由于其十字形的基面在所有四个侧面上分别具有嵌接区段ea。
43.但是一个运输单元的嵌接区段ea也可以构造成与另一个运输单元的至少一个嵌接区段ea相同类型并且优选互补。例如在运输单元3a上,两个箭头状的缺口(类似于在图1a中的运输单元3a、3b上,分别向右)可以沿运动方向br布置在对置侧上,并且在运输单元3b上,相应两个箭头状的凸起(类似于在图1a中的运输单元3a、3b上,分别向左)可以沿运动方向br布置在对置侧上。运输单元3a、3b在此能够以与以前相同的方式被带到嵌接位置,然而运输单元3a、3b在这种情况下不是相同实施的。以类似的方式,这也可以在任意不同构造的
嵌接区段ea中是这种情况。相同类型的嵌接区段ea在本发明的范围内可理解为具有相似几何形状的嵌接区段ea,这些嵌接区段大小相同或不同。例如不同大小的两个箭头状的凸起可以布置在运输单元3上,所述凸起因此是相同类型的。另外,当箭头状的凸起也具有相同大小时,这些凸起不仅相同类型而且相同。当然这同样适用于嵌接区段ea的所有其他实施方式。
44.在图2a至图2g中分别以俯视图示出具有不同的嵌接区段ea的运输单元3a、3b的示例性的不同的实施方式。运动方向br分别在x轴的方向上延伸。运输单元3a、3b分别具有投影到运输平面te上的基面,如示例性地在图2a中通过运输单元3a的阴影面示出的那样。每个运输单元3a、3b的基面可以由最小包围的矩形限定。最小包围的矩形表示包封运输单元3a、3b的基面的、尽可能最小的轴平行的矩形。在图2a中,两个运输单元3a、3b的最小包围矩形分别具有在x方向上的长度lmura、lmurb和在y方向上的宽度bmura、bmurb。通常适用的是,在两个运输单元的嵌接位置中,两个运输单元3a、3b的最小包围的矩形面相叠,如通过图2a中的交叉阴影线示出的那样。基面和最小包围的矩形面仅在图2a中详细示出。这也代表性地适用于图2b至图2g中的其他实施方式,其中最小包围的矩形面仅仅虚线地或者点划线地表示。最小包围的矩形面(lmur x bmur)和运输单元3a、3b的基面之间的比例优选最大为2,优选最大为1.5。由此保证,用于布置驱动磁体4的可用面积足够大,以便能够产生足够大的驱动力和悬浮力。此外,最小包围的矩形面和运输单元3a、3b的基面之间的比例优选为至少1.1、特别优选最小1.2,以便能够构造足够大的嵌接区段ea。
45.在按照图2a至图2d和图2f至图2g的实施方式中,运输单元3a、3b的互补的嵌接区段ea在运动方向br上重叠并且运输单元3a、3b在法向于运动方向br的方向上、在此在y方向上完全重叠,从而所述侧棱边对齐。在图2e的示例中,运输单元3a、3b分别具有大致十字形的基面。由此,不仅嵌接位置是可能的,而且可实现不同的嵌接位置,例如在图3a和图b中所示。在此,嵌接区段ea在运动方向br(相应于x方向)上重叠并且运输单元3a、3b此外还在法向于运动方向br的方向上、在此在y方向上部分重叠。与其他实施方式不同,运输单元3a、3b在此沿y方向仅部分地重叠,即彼此错位。
46.在按照图2f的实施方式中,互补的嵌接区段ea基本凹/凸地实施并且在嵌接位置中在嵌接区段ea之间横向于运动方向br地设置一定的间隙s。由此,即使当运输单元3a、3b共同地在嵌接位置中运动时,在运输单元3a、3b之间的一定的相对运动也是可能的,由此例如可以执行蛇形运动模式。通常,处于嵌接位置中的两个运输单元3i不需要彼此接触,而是只要它们足够靠近使得它们彼此接触即可,由此满足的条件是,沿所述运动方向的所述总延伸尺寸小于沿所述运动方向的各个运输单元延伸尺寸的总和。
47.在图3a和图3b中分别示出在两个不同的嵌接位置中的三个运输单元3a、3b、3c。在图3a中,运动方向br相对于x和y方向倾斜延伸。在图3b中,运动方向在x方向上延伸。在这两种情况下,适用的是,相应两个运输单元3a和3b、3b和3c的互补的嵌接区段ea在运动方向上这样重叠,使得所有运输单元3a-3c在运动方向上的总延伸尺寸小于运输单元3a至3c的相应的运输单元延伸尺寸ltea至ltec的总和。在图3c中示出两个运输单元3a、3b的互补的嵌接区段ea的示例性的变型方案,所述两个运输单元不仅沿运动方向br重叠,而且附加地沿法向于运输平面te的高度方向、在此沿z方向重叠。由此,例如也可以实现矩形或正方形的基面。当然,不同的变型方案也可以组合,例如办法是:在图2a至图2e中示出的互补嵌接区
段ea的实施方式附加地在高度方向上重叠,从而基本在三个彼此垂直的方向上得到三维的重叠。
48.在根据图3b的示例中可见的是,运输单元3b在嵌接位置中具有横向于运动方向br、在此在y方向上的相对于两个其他运输单元3a、3c的错位。运输单元3a至3c因此可以沿横向方向部分地并排运动并且不必对齐,如这例如具有在图1a中的设计方案的情况那样。因此,通常运输单元3i也可以横向于运动方向br彼此错位地运动。由此,尤其是相对于以长定子直线马达形式的已知的运输装置得到更大的灵活性。例如,运输单元3a-3c能够在图3b中示出的嵌接位置中共同地沿运动方向br运动并且在沿运动方向br共同运动期间(或者也在静止状态中),各个运输单元3i能够沿横向方向从嵌接位置中运动出来。类似地,在运输单元3a至3c沿运动方向br运动期间,一个或多个另外的运输单元3i也可沿横向方向运动到与运输单元3a至3c的嵌接位置中。
49.在图4中以俯视图示出平面马达形式的运输装置1。多个运输分段tsi环形地组成,使得得到具有中央自由空间的环形的运输平面te。在运输平面te中布置有大量运输单元3i,所述运输单元能够彼此独立地至少二维地在运输平面te中运动,以便分别运输对象o。在一些运输单元3i上没有布置对象o,因为所述对象例如还没有装载或已经卸载。运输单元3i的运动控制以已知的方式通过平面马达控制单元5进行,所述平面马达控制单元控制运输分段tsi的驱动线圈6。在运输装置1中布置有两个工作站as1、as2,在所述工作站中分别在被运输的对象o上执行特定的工作过程。根据生产过程可想到不同的工作过程。
50.例如对象o可以是在工作站asi中被填充的容器。对象o也可以是这样的产品,在该产品上在工作站asi中执行特定的机械处理步骤。如开头所述,大多存在主工艺流动方向,在该主工艺流动方向上可能期望对象o的尽可能大的吞吐量。主工艺流动方向在此沿着平行于工作站as1、as2的闭合环路延伸,如通过箭头所示。在工作站as1、as2的区域中例如可以期望的是,尽可能多的对象o紧密地彼此相继运动。因此,目标是最小化平均对象距离oam。在此,迄今已知的具有正方形基面的运输单元设计受到限制,因为最小平均对象距离oam基本是运输单元的长度。通过运输单元3i的根据本发明的实施方案,现在尽管保持运输单元延伸尺寸不变,仍然可以明显地减小彼此相继运动的运输单元2i的平均对象距离oam,因为运输单元3i至少在运动方向br(其在此相应于主工艺流动方向)上部分地重叠。
51.如在图4中可见,多个运输单元3i在工作站as1、as2的区域中被带到嵌接位置中,在该嵌接位置中,相继的运输单元3i的在此互补的嵌接区段ea在运动方向br上重叠。然后,在这个嵌接位置中,运输单元3i可以沿运动方向br一起运动通过工作站as1、as2的区域,其中,相应的工作过程可以分别在所述对象上执行。在工作站as1、as2之前和之后,运输单元3i又可以从嵌接位置被解除并且对象距离oai可以相对于相应沿运动方向br在后面移动的运输单元3i又被增大,例如因为对象距离oa在工作站外不起重要的作用。例如处于嵌接位置中的运输单元3i可以以相对较低的速度运动通过工作站as1、as2,以便有足够的时间执行工作过程。
52.在最前方的运输单元3i处的工作过程结束之后,所述运输单元可以单独加速,以便尽可能迅速地到达下一个工作站asi或卸载站。如图4所示,也可以在工作站asi的区域中,各个运输单元3i超过处于嵌接位置中的运输单元3i。也可能的是,运输单元3i横向于运动方向br从嵌接位置中运动出来,例如以便将损坏的对象o从工作过程中取出。由此,尤其
是相对于长定子直线马达形式的已知的运输装置可以实现明显更灵活的运输过程,在所述运输装置中,运输单元仅沿一个方向彼此相继地运动。运输单元3i在此相同地实施并且相应于在图2a中示出的实施方式。然而,当然可以使用其他形式或可以组合各种实施方式。
53.在图5中示出运输装置1,下面借助于该运输装置来说明根据本发明的用于运行运输装置1的方法。运输装置1具有多个运输分段tsi,这些运输分段共同构造闭合的运输平面te。在此,在运输平面te中布置有八个分别具有方形基面的运输单元3i。然而,运输单元3i也可以具有带有任意其他形状的基面。运输单元3i也不必实施成相同的,而是可以具有不同的形状。运输装置1的控制通过至少一个(未示出的)平面马达控制单元或上级的控制单元进行。在每个运输单元3i上布置有待运输的对象o。根据本发明,运输单元3i在运输平面te中沿运动方向br彼此相继地运动,使得这些运输单元至少沿运动方向br以如下方式重叠,即,运输单元3i沿运动方向br的总延伸尺寸lg小于沿运动方向br的运输单元3i的各个运输单元延伸尺寸ltei的总和。通过根据本发明控制运输单元3i,即使在没有互补的嵌接区段ea的运输单元3i中也可以减小平均对象距离oam。
54.有利地,对象o在此这样定位在运输单元3i上,使得对象o之间沿运动方向br的平均对象距离oam最大为运输单元3i沿运动方向br的平均运输单元延伸尺寸ltem。然而,优选地,平均对象距离oam最大为平均运输单元延伸尺寸ltem的三分之二。在此,特别有利的是,运输单元3i相对彼此地布置并且所述对象o相对于所述运输单元3i布置成,使得所述对象o在运动方向br上处于一条直线上。由此,例如可以实现对象o与工作站之间的横向于运动方向br的恒定距离。在此特别有利的是,对象o被定位成使得平均对象距离oam最大相应于运输单元3i在运动方向br上的平均运输单元延伸尺寸ltem的一半。
55.在图6中示出运输装置1的另外的有利的实施例。定子2在此又通过多个运输分段tsi形成,所述运输分段彼此邻接,以便共同地构造运输平面te。在所述运输平面te中布置有多个运输单元3i,所述运输单元能够彼此独立地至少二维地在所述运输平面te中运动。运输装置1的控制、尤其是运输单元3i的运动又通过至少一个(未示出的)平面马达控制单元或上级的控制单元进行。运输单元3i在此相同地构造并且分别具有带有方形基面的基体9。当然,这仅是示例性的并且也可以提供具有不同形状的不同运输单元3i。在基体9的朝向运输平面te的下侧上以已知的方式分别布置有驱动磁体4,如在图6中右上方的运输单元3i上所示(基体被部分剖开地示出)。驱动磁体4与定子2的(未示出的)驱动线圈共同作用,以使运输单元3i运动。驱动磁体4在此以已知的1d布置被布置在运输单元上,但当然也可以是2d布置,如图1a中所示。
56.在每个运输单元3i的基体9的与驱动磁体4相对置的上侧上布置有物体承载件7,所述物体承载件是相应的运输单元3i的一部分。物体承载件7在此具有矩形的基面并且在侧面以伸出长度a延伸超过基体9的基面。由此,形成投影到运输平面te上的突出面af,如示例性地在两个运输单元3i上通过阴影区域所示。由此,运输单元3i能够如所示出的那样沿运动方向br(在此沿x方向)彼此相继运动,使得两个沿运动方向br彼此相叠的运输单元3i(在此交替地为上运输单元和下运输单元3i)沿运动方向br以及也横向于运动方向br(在此沿y方向)这样地重叠,使得运输单元3i沿运动方向br的总延伸尺寸lg小于运输单元3i沿运动方向br的各个运输单元延伸尺寸ltei的总和。
57.在运输单元3i的所示出的型廓中,相应两个沿运动方向br彼此相继的运输单元3i
(在此交替地是上运输单元和下运输单元3i)的基体9沿y方向,以伸出长度a间隔。因此,伸出长度a是两个运输单元3i在y方向上重叠的距离。但是,原则上也可以减小在y方向上的距离,使得所述基体9在y方向上彼此直接邻接并且一个运输单元3i的物体承载件7的突出面af另外在z方向上与相应另一个运输单元3i的基体9重叠。在所示的示例中,利用每个运输单元3i运输一个对象o,该对象分别在突出面af的区域中布置在物体承载件7上。由此可以实现,对象o之间在运动方向br上的平均对象距离oam小于运输单元3i在运动方向br上的平均运输单元延伸尺寸ltei。通过将物体承载件7布置在具有矩形或方形基面的运输单元3i上,可以以简单的方式实现嵌接区段ea,而不必改变基体的形状。
58.所示出的实施方式此外是有利的,因为一个或多个运输单元3i能够以简单的方式从嵌接位置中取出。例如所述运输单元3y能够沿y方向从所述嵌接位置中运动出来并且然后任意地在所述运输平面te中进一步运动,如通过箭头和虚线的运输单元3y所示。由此,例如可以将有缺陷的对象o从生产过程中移除。在此,取出可以在静止状态下或在运输单元3i运动期间进行。由此,也可以在相同的位置上或者在另外的位置上重新送入所述运输单元3i,比如用于重复特定的工作过程。
59.当然,在所示的示例中,任何其他变型方案也是可能的。例如在一个或多个运输单元3i上可以布置另外的物体承载件7a,例如布置在运输单元3x的对置侧上,如在图6中用虚线表明的那样。例如两个物体承载件7、7a在该情况下可以通过唯一的长物体承载件构造,该物体承载件在对置侧上伸出超过基体9。当然,也可以取而代之地将嵌接区段ea如借助图1a至图2g示出的那样布置在图6中的运输单元3i中的一个运输单元上。由此可看出,利用根据本发明的运输装置1可以相对于传统的运输装置提高运输过程的灵活性。
60.尤其是,相对于已知的线性运输装置、例如长定子直线马达,显著改进是可能的,因为平均对象距离oam的减小不限于固定的运动方向。尤其是,由于平面马达形式的运输装置1的运输单元3i的二维的运动可能性,能够以有利的方式在任意的运动方向br上使用根据本发明的重叠,以便减小对象距离oam并且由此提高在该方向上的对象吞吐量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1