往复式压缩机的活塞定位过程的制作方法
本发明涉及往复式压缩机,该往复式压缩机包括生成梯形感应电压的无刷直流(brushless direct current,bldc)三相同步电机以及用于驱动该bldc电机的三相电压反相器(voltage inverter)。更具体地,本发明涉及往复式压缩机的活塞定位过程(piston positioningprocess),这种过程在bldc电机的起动程序(start procedure)开始之前应用。
背景技术:
1、在bldc电机的起动程序开始之前,往复式压缩机的活塞定位过程是在往复式压缩机处、特别是在具有不均衡压力的起动条件下,获得良好起动性能的非常重要的阶段(step)。为了使活塞以适当的方式定位,应当以将活塞靠近它的上止点定位的这种方式,通过与该活塞机械相关联的转子来沿相反方向(sense)移动该活塞。在没有以适当的方式放置活塞的情况下,例如由于由冷却气体施加在活塞上的力,因此,电机可能失去其同步性,并且随后的起动程序可能失败,从而导致多次停止(setback)。
2、为了描述现有技术中目前面临的问题,现有技术的图1描绘了用于在往复式压缩机中应用的bldc电机的典型控制系统的图,该往复式压缩机包括被用于驱动bldc电机100的变频器(frequency inverter)200。通常,变频器包括:可以由输入转换器级提供的直流电源vcc;以及开关s1至s6(例如由晶体管组成),这些开关与它的相应续流二极管(freewheel diode)d1至d6并联。如可以在现有技术的图1中注意到,开关s1至s6可操作地与bldc电机100和处理单元300相关联,包括电流控制器301和命令单元302的处理单元300与位于母线中的电流传感器201相关联,这种电流传感器201被用于借助于感测母线电流ibusbar而以间接方式测量在bldc电机100中循环的电流。借助于处理单元300基于由电流控制器301限定的控制信号并且基于由命令单元302限定的换向(commuting)顺序,来变换(shift)开关s1至s6,以便控制分别向bldc电机100的相fa、fb以及fc施加的电流ia、ib以及ic。值得强调的是,进行开关s1至s2的变换的方式取决于所使用的控制技术的类型。
3、在这个意义上,有几种用于驱动bldc电机的控制技术,例如包括:矢量控制、直接转矩控制dtc、梯形控制或“六阶段(step)”。“六阶段”控制主要被用于驱动bldc电机,这是由于其实现复杂度低、电机/反相器组的成本低以及效率折衷优异。
4、在“六阶段”控制技术中,bldc电机的起动通常是以如下方式来执行的:-阶段1-将直流电流注入电机中,使该电机的转子移动至已知且稳定的位置;阶段2-一旦使转子以足够的方式定位,反相器就以异步的方式使开关换向,即,不监测转子的实际定位。随着转子的移动,处理单元可以检测电机的实际位置并且以同步的方式驱动该电机。在“六阶段”控制技术中,存在用于开关s1至s6的变换和六个电位置的六个可能的组合,如在现有技术的图2中可以看到的,其中,暗条表示开关s1至s6被换向,通常按照120电度(electrical degree)换向。
5、然而,上面提及的控制技术都没有考虑与往复式压缩机的驱动相关的附加要求,目的在于如果活塞靠近压缩阶段,则当起动程序开始时,电机因活塞上的冷却剂(coolant)气体的压力而将面对高阻力转矩区(resistant high torque region)。由于电机不具有足够的动量(以及作为结果而积累的动能)来抵消(defeat)这样的阻力转矩,因此,存在起动失败并且需要再次起动的很大可能性。现有技术的图3示出了电机在每一个机械循环中必须抵消的阻力转矩和压力曲线,以及现有技术的图4描绘了对于往复式压缩机从起动以来电机的速度行为经受了诸如图3所描述的负荷(carga)。从现有技术的图4注意到,随着压缩机交替吸入阶段和排出阶段,电机的速度振荡(oscillat)非常多的交替加速度矩和减速度矩。从现有技术的图4还注意到,在第一圈(turn)时,电机在第一压缩循环期间失去非常多的速度,并且速度达到接近零,但是其在克服第一压缩循环之后设法恢复并且在继续时加速非常多。
6、因此,现有技术的几个文献均示出了活塞定位过程,其中,所述活塞不是以随机的方式放置的,即,在开始适当的起动程序之前,活塞靠近它的上止点(也被称为最大转矩点)。在以这种方式进行定位过程之后,当起动程序正在开始时,电机将得到足以克服活塞上的由冷却剂气体压力生成的阻力转矩的速度和惯性动量。例如,现有技术文献cn102739123、us20060120898、us5801500、kr20100058203以及us 20070085501描述了定位过程,其中,活塞在起动程序开始之前到达它的上止点。值得强调的是,如果在定位过程期间,没有对向电机施加的电流进行适当控制,那么存在电机的转矩仍保持低于阻力转矩的风险,从而导致电机的同步性失去,并且作为结果,导致起动失败。
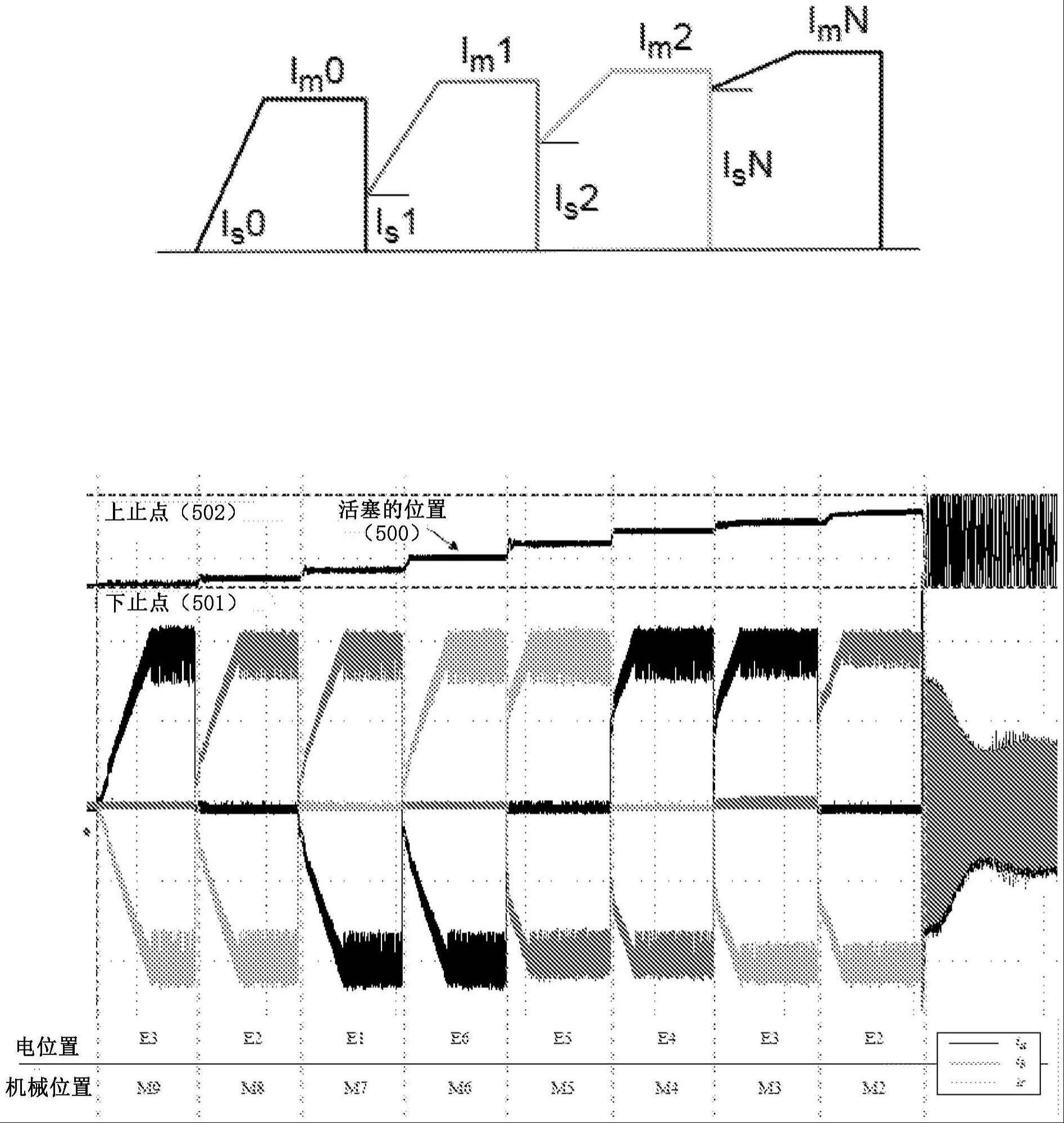
7、根据现有技术的图5(a)、图5(b)以及图5(c),当前使用的定位过程基本上包括将活塞500从靠近下止点501的最初位置带到活塞500到达它的上止点502的最终位置。在定位过程的几个阶段中,以活塞从最初位置逐阶段移动至最终位置(上止点)的方式,在电机中连续注入电流来进行这种定位。如可以在现有技术的图5a、图5b以及图5c中看到,定位过程包括用于具有3个极对的电机的六个电位置(electrical position)e1至e6和十八个机械位置m1至m18,即,每电圈(electrical turn)对应于六个机械位置,使得相同的电位置对应于三个机械位置。自然地,电机的极数越多,在相同的电位置的定位过程中就会存在越多的机械位置。
8、根据现有技术的图6,在定位过程的第一阶段,将电流从零值开始注入,并且使电流递增直到最大可能值,这导致电机中的最大转矩,从而使活塞从最初位置移动至第二位置。期望一定的稳定化周期,然后,在定位过程的第二阶段,将电流从零值开始再次注入,并且使电流递增直至最大可能值,从而使活塞从第二位置移动至第三位置。这样的阶段应当进行直到活塞到达它的最终位置(上止点),以使仍保持在开始起动程序的位置。
9、然而,随着活塞到达上止点,经压缩的冷却剂气体增加了被施加在所述活塞上的强度,从而生成与定位过程相反的压力。因此,一旦在定位过程的每个阶段,电流以零值开始,由冷却剂气体施加的动力就可能将活塞从某个先前位置移动至它被定位的位置,并且当增加该电流的值时,活塞可能被以不正确的方式放置,从而使电机失去同步,这可以导致起动失败。这个问题可以在现有技术的图7中看到。
10、在图7中,并且在随后的图9、图11以及14中,看到随着从感测位置磁放大器(position transductor)(未示出)获得的活塞500的位置的曲线,该曲线表示活塞500从它的下止点501直到它的上止点502的位移。
11、根据现有技术的图7,当使电流以零值开始时,活塞例如可以从第四机械位置m4返回至第六机械位置m6,并且随着电流的递增而被不正确地置于第九机械位置m9。如先前提及,这是由于每个电位置与三个机械位置相关联而发生的。因此,由于第九机械位置m9在电位置方面对应于第三机械位置m3(这两个机械位置都与第三电位置e3相关),因此,控制系统没有设法“注意”机械位置之间的差异,而是在机械位置m9不正确地执行定位过程。由冷却剂气体施加的强度产生的活塞的这种不正确定位使电机失去同步,这可以导致起动失败。
12、所已知的克服由冷却剂气体施加的强度产生的活塞的不正确定位的技术包括在定位过程的每个阶段注入总是具有最大值的电流。
13、因此,当从某个阶段进入新阶段时,被注入bldc电机中的电流不再以零值开始,而是以最大可能值开始,如在现有技术的图8和图9的电流ia、ib以及ic的波形中所看到的。
14、这种技术克服了定位过程期间的失败风险,但是当在所述过程中从某一阶段进入新阶段时,当活塞500因低转矩而靠近它的上止点501时,增加了bldc电机的转矩的突然变化。这种突然变化导致bldc电机100的欠阻尼应答(underdamped answer)以及每个阶段开始时的机械振荡(mechanical oscillation)(如图9的曲线图所示)能够在bldc电机100以及压缩机中生成振动(vibration)和噪声。
15、此外,重要的是要注意,被施加到bldc电机100上的转矩与被注入该bldc电机100中的电流成比例,并且和转子400的当前位置与该转子400的新位置之间的角度的正弦成比例,如下所示:
16、τ=k.i.sen(δ),其中,
17、τ-在bldc电机100中生成的机械转矩;
18、-被注入bldc电机100中的电流;
19、k-项目依赖性常数(电气和机械方面);以及
20、δ-转子400的当前位置与该转子400的新位置之间的角度。
21、由于k取决于构造方面,并且根据这种技术的过程总是在每个阶段注入相同值的电流(换句话说,具有最大值的电流),因此,在定位过程的每个阶段,在bldc电机100上逐渐形成的转矩将总是相同的,而与活塞500更靠近还是更远离它的上止点无关。然而,随着活塞500离开靠近它的下止点的最初位置并接近靠近它的上止点的最终位置,冷却剂气体开始被压缩,从而在活塞500上施加削弱定位过程的强度。重要的是要注意,当活塞500靠近它的上止点时,由冷却剂气体施加在活塞500上的强度达到它的最大值。
22、因此,清楚的是,bldc电机100在定位过程期间不失去同步性所需的转矩值是动态的,其实际上以零开始,并且每当活塞500改变位置并接近它的上止点时增加。随着活塞500接近上止点,由冷却剂气体施加的强度以及bldc电机100为稳定在活塞500的新位置所需的转矩和时间值将更高,如可以在图9中看出。
23、因此,现有技术没有提供防止上述问题的理想定位过程。
24、此外,当仅使用母线中的一个电流传感器时,现有技术不能以小于60电度的步长(step)充分控制电流并传导电机的三相。
技术实现思路
1、本发明的目的在于,提供一种在其上止点附近的活塞的定位过程,其避免了现有技术的缺点。
2、这种目的是借助于在bldc电机的起动程序开始之前应用的往复式压缩机的活塞的定位过程来实现的,该往复式压缩机包括:
3、-bldc电机,bldc电机具有与活塞机械相关联的转子;
4、-变频器,该变频器是在bldc电机的驱动中使用的,该变频器包括六个开关;
5、-电流传感器,该电流传感器位于母线上;
6、-处理单元,该处理单元包括电流控制器以及命令单元,以使所述开关换向;
7、其中,在定位过程的某一阶段,由处理单元基于由电流控制器限定的控制信号并且基于由命令单元限定的换向顺序,来驱动所述开关,以控制向bldc电机的相施加的电流;
8、其中:
9、在每个新阶段,初始电流的值高于或等于前一阶段的初始电流的值,并且
10、在每个新阶段,最大电流的值高于或等于前一阶段的最大电流的值。
11、便利地,根据本发明的过程在于,初始电流的值以及最大电流的值取决于活塞的位置。
12、根据本发明的过程的特征还在于,在定位过程的新阶段,活塞离它的上止点越远,初始电流的值越小,并且最大电流的值越小。
13、根据本发明的过程的特征还在于,bldl电机的稳定化时间在定位过程的每个阶段都是可变的,在第一阶段较短而在最后阶段较长。
14、根据本发明的过程的优点之一在于,降低了定位过程期间的功耗、根据所需的转矩优化了电流的注入、提高了系统的最终效率。
15、根据本发明的过程的另一优点在于,在电机失去同步性的情况下,减少了由于在起动不成功时所需的几个顺序起动而造成的电机发热。
16、根据本发明的过程的附加优点在于在定位过程期间降低了噪声以及振动。
17、本发明还提供了一种在bldc电机的起动程序开始之前应用的往复式压缩机的活塞的定位过程,该往复式压缩机包括:
18、-bldc电机,bldc电机具有与活塞机械相关联的转子;
19、-变频器,该变频器是在bldc电机的驱动中使用的,该变频器包括六个开关;
20、-电流传感器,该电流传感器位于母线上;
21、-处理单元,该处理单元包括电流控制器以及命令单元,以使所述开关换向;
22、其中,在定位过程的某一阶段,由处理单元基于由电流控制器限定的控制信号并且基于由命令单元限定的换向顺序,来驱动所述开关,以控制对bldc电机的相施加的电流;
23、其中:
24、处理单元以150电度来驱动开关,在各个电位置处可以同时驱动多达三个开关。
25、方便地,根据本发明的过程在于,以150电度驱动开关导致12个驱动电位置。
26、根据本发明的过程还在于,当同时驱动所述开关中的三个开关时,具有通过将驱动扩展至150电度而叠加的驱动的开关应当得到同一控制信号。
27、此外,根据本发明的过程在于,仅在变频器的上级开关(superior switch)上施加脉冲宽度调制。
28、根据本发明的过程的附加优点在于在定位过程期间降低了噪声以及振动。
29、本发明还提供了一种在bldc电机的起动程序开始之前应用的往复式压缩机的活塞的定位过程,该定位过程匹配先前定义的过程。
30、根据本发明的过程在于以下事实:当活塞靠近它的上止点时,该活塞的定位过程结束。
31、尽管如此,根据本发明的过程在于,当所述活塞发现它本身处于离开它的上止点的一个或两个位置时,该活塞靠近它的上止点。
32、根据本发明的过程的另一优点在于,借助于在定位过程的每个阶段施加根据活塞的位置调整的初始电流来保持电机的转矩,避免了定位过程期间的同步性失去,从而避免了在每次位置变化之后因电流斜坡而造成的电机转矩的谷值(valley)。
- 还没有人留言评论。精彩留言会获得点赞!