一种集成无线充电与激光雷达测距的电缆剥皮机器人及方法与流程
1.本发明属于高压电缆绝缘层与铠装层的剥皮技术领域,具体涉及一种集成无线充电与激光雷达测距的电缆剥皮机器人及方法。
背景技术:
2.为了便于对高压电缆的绝缘层和铠装层剥皮,市场上出现了多种电缆剥皮装置主要分为纵切式和环切式两种,大部分都是手动作业。专利1(申请号:202120952906.9)公开了一种集成纵切与环切的电缆剥皮自动化装置。虽然在纵切与环切方面向前迈出了巨大进展,但是在解决实际电缆轮廓绝缘层和铠装层的切割仍存在挑战,只能解决圆柱度高的电缆的切割。专利2(申请号:202110848929.x)公开了一种适应不规则电缆外轮廓的电缆剥皮装置及方法。虽然提出了一种可以适应不规则轮廓的检测、执行机构和算法,但存在着圆盘的蓄电池耗电快、纵切装置和环切装置在底座平台滑移摩擦卡顿、接触式直线位移传感器收发数据响应慢等问题。专利1、专利2存在切削铁屑、橡胶屑易掉进开放式的减速箱,造成齿轮运转不畅的问题,同时驱动小齿轮的伺服电机占用纵切装置的行程,本专利是在专利1和专利2的技术方案总体架构基础上进一步地改进。
技术实现要素:
3.本发明的目的在于提供一种集成无线充电与激光雷达测距的电缆剥皮方法,可以在纵切装置和环切装置在线缆剥皮的时候更为精准的适应不规则轮廓的电缆,同时有效保证纵切装置和环切装置在运行中的稳定性。
4.为实现上述目的,本发明采取的技术方案为:一种集成无线充电与激光雷达测距的电缆剥皮方法,将电缆伸入第一直驱伺服电机和第二直驱伺服电机的中空动力输出端,根据切割位置需要,由plc运动控制器通过信号线发送指令给第一底座丝杠驱动伺服电机控制器和第二底座丝杠驱动伺服电机控制器,第一底座丝杠驱动伺服电机控制器和第二底座丝杠驱动伺服电机控制器分别带动第一丝杠螺母和第二丝杠螺母旋转,使第一滑块和第三滑块在第一直线导轨上滑动,第二滑块和第四滑块在第二直线导轨上滑动,调节纵切装置和环切装置之间的位置,然后通过纵切装置纵切电缆绝缘层,通过环切装置环切绝缘层,切割过程中,单相交流电经开关电源整流后,供电给plc运动控制器,控制信号通过wifi/蓝牙/zigbee无线传输的方式,由plc运动控制器发送指令给纵切刀头径向进给伺服电机控制器,通过第一圆盘上的蓄电池供电,纵切刀头径向进给伺服电机带动第一丝杠旋转,第一t型螺母、第一倒t滑块、纵切刀头、纵切刀头旋转驱动伺服电机及其控制器、第一激光雷达测距传感器,作为整体径向运动,通过第一激光雷达测距传感器的探头检测纵切刀头与电缆实际外轮廓在径向的实际距离,将实际距离与理论值比较的差值,并转换成电压或者电流信号,传输到plc运动控制器,并发送指令给纵切刀头径向进给伺服电机控制器,通过第一丝杠和第一t型螺母实时控制第一倒t滑块径向运动,当第一激光雷达测距传感器的探头与电缆外轮廓的距离重合时,纵切刀头径向进给伺服电机停止动作;当刀头与电缆实际外轮
廓距离大于理论值时,纵切刀头径向进给伺服电机驱动第一滑块远离电缆中心方向运动;当纵切刀头与电缆实际外轮廓距离小于理论值时,纵切刀头径向进给伺服电机驱动第一滑块靠近电缆中心方向运动;保证纵切刀头运动轨迹与电缆实际外圆轮廓曲线重合,在纵切过程中,无线充电模组控制器实时监测蓄电池的电流和电压判断蓄电池电量soc,蓄电池电量soc不足时,第一无线充电模组为蓄电池充电;
5.单相交流电经开关电源整流后,供电给plc运动控制器,控制信号通过wifi/蓝牙/zigbee无线传输的方式,由plc运动控制器发送指令给环切刀头径向进给伺服电机控制器,通过第二圆盘上的蓄电池供电,环切刀头径向进给伺服电机带动第二丝杠旋转,第二t型螺母、第二倒t型滑块、环切刀头、纵切刀头旋转驱动伺服电机及其控制器、第二激光雷达测距传感器,作为整体径向运动,通过第二激光雷达测距传感器的探头检测刀头与电缆实际外轮廓在径向的实际距离,将实际距离与理论值比较的差值,并转换成电压或者电流信号,传输到plc运动控制器,并发送指令给环切刀头径向进给伺服电机控制器,通过第二丝杠和第二t型螺母实时控制第二倒t型滑块径向运动,当第二激光雷达测距传感器的探头与电缆外轮廓的距离重合时,环切刀头进给伺服电机停止动作;当环切刀头与电缆实际外轮廓距离大于理论值时,环切刀头进给伺服电机驱动第二倒t型滑块远离电缆中心方向运动;当环切刀头与电缆实际外轮廓距离小于理论值时,环切刀头进给伺服电机驱动第二倒t型滑块靠近电缆中心方向运动;保证纵切刀头运动轨迹与电缆实际外圆轮廓曲线重合,在环切过程中,无线充电模组控制器实时监测蓄电池的电流和电压判断蓄电池电量soc,蓄电池电量soc不足时,第二无线充电模组为蓄电池充电。
6.进一步的,第一直驱伺服电机和第二直驱伺服电机均采用24槽20极分数槽集中绕组且转子表贴式永磁电机,通过plc运动控制器设定其旋转角度间隔检测时间,使其每旋转一个角度,在设定的时间间隔内,对电缆外绝缘的位置检测与切割作业。
7.进一步的,纵切刀头旋转驱动伺服电机采用第一圆盘上的蓄电池供电,在纵切时,蓄电池供电给三相全桥逆变电路的母线和纵切刀头旋转驱动伺服电机控制器,纵切刀头旋转驱动伺服电机控制器通过接收霍尔或者光电编码传感器的位置和转速信号,输出六路pwm门极驱动信号,驱动三相全桥逆变电路,从而使纵切刀头旋转驱动伺服电机驱动器驱动纵切刀头旋转驱动伺服电机带动纵切刀头旋转切割。
8.进一步的,纵切刀头旋转驱动伺服电机、环切刀头旋转驱动伺服电机、纵切刀头径向进给伺服电机和环切刀头径向进给伺服电机的驱动控制方式相同
9.进一步的,在纵切装置环线缆切割时,220v-50hz单相交流电经24v开关电源整流供电给三相全桥逆变电路的母线和第一直驱伺服电机控制器,第一直驱伺服电机控制器通过接收霍尔传感器或者光电编码传感器的位置和转速信号,输出六路pwm门极驱动信号,驱动三相全桥逆变电路,从而使第一直驱伺服电机带动第一圆盘转动进行环线缆切割。
10.进一步的,第一直驱伺服电机、第二直驱伺服电机、第一底座丝杠驱动伺服电机和第二底座丝杠驱动伺服电机的驱动控制方式相同。
11.一种集成无线充电与激光雷达测距的电缆剥皮机器人,包括纵切装置、环切装置和底座支撑装置,底座支撑装置上安装有平行两套丝杠机构,纵切装置和环切装置分别安装在两套丝杠机构上,纵切装置包括纵切机构、第一直驱伺服电机基板和第一圆盘,纵切机构安装在第一圆盘上,第一直驱伺服电机基板上安装有第一直驱伺服电机,第一直驱伺服
电机动力输出端轴向设置有供线缆进出的通孔,第一圆盘安装在第一直驱伺服电机动力输出端,第一直驱伺服电机基板和第一圆盘上与第一直驱伺服电机动力输出端对应开设有供线缆进出的开口。
12.进一步的,纵切机构包括第一激光雷达测距传感器、纵切刀头径向进给机构、第二法兰机座、纵切刀头和纵切刀头旋转驱动伺服电机,纵切刀头径向进给机构安装在第一圆盘上,第二法兰机座安装在切刀头径向进给机构的活动端,纵切刀头旋转驱动伺服电机通过螺钉固定到第二法兰机座上,纵切刀头通过第一轴套和螺钉固定到纵切刀头旋转驱动伺服电机的主轴上,第一激光雷达测距传感器通过螺钉固定到第二法兰机座上。
13.进一步的,纵切刀头径向进给机构包括第一轴承座、纵切刀头径向进给伺服电机、第一法兰机座、第一丝杠、第一联轴器和第一倒t型滑块,第一轴承座安装在第一圆盘上,第一轴承座内设有第一轴承,纵切刀头径向进给伺服电机通过螺钉配合第一法兰机座安装在第一轴承座一侧的第一圆盘上,第一丝杠一端穿过第一轴承另一侧通过第一联轴器与纵切刀头径向进给伺服电机传动连接,并通过第一锁紧轴套锁紧,第一丝杠上设置有第一t型螺母,第一倒t型滑块配合安装在第一t型螺母上
14.进一步的,第一激光雷达测距传感器、纵切刀头和第一倒t型滑块三者在同一纵切面且通过第一圆盘的圆心。
15.进一步的,环切装置包括环切机构、第二直驱伺服电机基板和第二圆盘,纵切机构安装在第二圆盘上,第二直驱伺服电机基板上安装有第二直驱伺服电机,第二直驱伺服电机动力输出端轴向设置有供线缆进出的通孔,第二圆盘安装在第二直驱伺服电机动力输出端,第二直驱伺服电机基板和第二圆盘上与第二直驱伺服电机动力输出端对应开设有供线缆进出的开口。
16.进一步的,环切机构包括第二激光雷达测距传感器、环切刀头径向进给机构、第四法兰机座、环切刀头和环切刀头旋转驱动伺服电机,第四法兰机安装在纵切刀头径向进给机构的活动端,环切刀头旋转驱动伺服电机通过螺钉固定到第四法兰机座上,纵切刀头通过第二轴套和螺钉固定到纵切刀头旋转驱动伺服电机的主轴上,第二激光雷达测距传感器通过螺钉固定到第四法兰机座上。
17.进一步的,环切刀头径向进给机构包括第二轴承座、环切刀头径向进给伺服电机、第三法兰机座、第二丝杠、第二联轴器和第二倒t型滑块,第二轴承座安装在第二圆盘上,第二轴承座内设有第二轴承,环切刀头径向进给伺服电机通过螺钉配合第三法兰机座安装在第二轴承座两侧的第二圆盘上,第二丝杠二端穿过第二轴承另两侧通过第二联轴器与环切刀头径向进给伺服电机传动连接,并通过第二锁紧轴套锁紧,第二丝杠上设置有第二t型螺母,第二倒t型滑块配合安装在第二t型螺母上。
18.进一步的,第二激光雷达测距传感器、环切刀头和第二倒t型滑块三者在同一环切面且通过第二圆盘的圆心。
19.进一步的,第一圆盘和第二圆盘分别安装有用于对纵切机构和环切机构供电的蓄电池,第一直驱伺服电机和第一圆盘之间安装有第一无线充电模组,第一无线充电模组包括第一发射线圈和接第一收线圈,第一发射线圈通过螺钉安装在第一直驱伺服电机的端盖上,第一接收线圈通过螺钉安装在第一圆盘上,第一接收线圈和第一圆盘上的蓄电池连接,第二直驱伺服电机和第二圆盘之间安装有第二无线充电模组,第二无线充电模组包括第二
发射线圈和接第二收线圈,第二发射线圈通过螺钉安装在第二直驱伺服电机的端盖上,第二接收线圈通过螺钉安装在第二圆盘上,第二接收线圈和第二圆盘上的蓄电池连接。
20.进一步的,还包括有蓄电池无线充电系统,蓄电池无线充电系统包括继电器、变压器、单相桥式整流电路、单相h桥逆变电路、无线耦合器、单相h桥整流电路、buk降压电路、蓄电池和无线充电模组控制器,220v-50hz单相交流电经继电器连接变压器,变压器连接单相桥式整流电路,单相桥式整流电路连接单相h桥逆变电路,单相h桥逆变电路连接无线耦合器的发射线圈,无线耦合器的接收线圈连接单相h桥整流电,单相h桥整流电路连接buk降压电路,buk降压电路连接蓄电池,无线充电模组控制器分别连接继电器、蓄电池、单相h桥逆变电路和单相h桥整流电路。
21.进一步的,底座支撑装置两侧还分别设置有第一直线导轨和第二直线导轨,并在第一直线导轨上设置有第一滑块和第三滑块,第二直线导轨上设置有第二滑块和第四滑块,第一直驱伺服电机基板两侧通过螺钉分别与第一滑块和第二滑块连接,第二直驱伺服电机基板两侧通过螺钉分别与第三滑块和第四滑块连接。
22.进一步的,两套丝杠机构分别为第一丝杠螺母和第二丝杠螺母,底座支撑装置一端还安装有第一丝杠驱动伺服电机和第二丝杠驱动伺服电机,第一丝杠螺母采用第一丝杠驱动伺服电机驱动,第二丝杠螺母采用第二丝杠驱动伺服电机驱动。
23.进一步的,第一直驱伺服电机和第二直驱伺服电机均采用24槽20极分数槽集中绕组且转子表贴式永磁电机。
24.与现有技术相比,本发明具有如下有益效果:1.本发明通过激光雷达测距传感器的探头检测刀头与电缆实际轮廓在径向的实际距离,将实际距离与理论值比较的差值,转换成电压或者电流信号,传输到plc运动控制器,并发送指令给径向进给伺服电机控制器,通过丝杠和t型螺母控制滑块径向运动,从而保证刀头运动轨迹与电缆实际外圆轮廓曲线重合。本发明的电缆剥皮装置可以适应外表面凹凸不平、不同直径的电缆绝缘和铠装层的连续切割。2.设置有蓄电池无线充电系统,并在纵切装置和环切装置上安装有无线充电模组,蓄电池电量soc大于等于某一阈值时,圆盘上的刀头径向进给伺服电机及其控制器、刀头旋转伺服电机及其控制器和激光雷达测距传感器均由蓄电池供电;蓄电池电量soc小于某一阈值时,圆盘的上述用电设备由蓄电池供电,同时由无线充电模组经dcdc降压模块给蓄电池补能。3.纵切装置和环切装置与底座支撑装置的相对运动由直线导轨滑块实现,其中两组滑块分布固定到纵切装置和环切装置上,导轨固定到底座平台上,通过底座平台两组伺服电机驱动各自独立的丝杠螺母机构,从而推动纵切装置和环切装置在底座平台沿着导轨纵向滑移,有效提升纵向运动的精度。4.纵切装置和环切装置均采用直驱电机驱动圆盘旋转,无需多余传动结构,有效避免传动结构故障。
附图说明
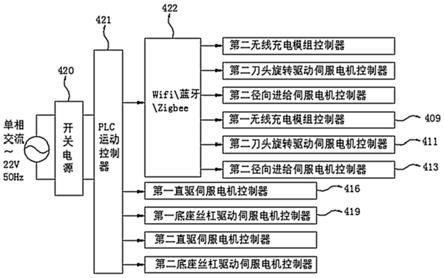
25.图1为本发明控制原理图;
26.图2为本发明第一直驱伺服电机的控制原理图;
27.图3为本发明第一底座丝杠驱动伺服电机的控制原理图;
28.图4为本发明纵切刀头旋转驱动伺服电机的控制原理图;
29.图5为本发明纵切刀头径向进给伺服电机的控制原理图;
30.图6为本发明整体结构图;
31.图7为本发明纵切装置结构剖面图;
32.图8为本发明环切装置结构剖面图;
33.图9为本发明蓄电池无线充电系统原理图;
34.图中:图中:100.纵切装置、101a.纵切刀头径向进给伺服电机、102a.第一法兰机座、103a.第一联轴器、104a.第一锁紧轴套、105a.第一轴承座、106a.第一轴承、107a.第一t型螺母、108a.第一丝杠、109a.第一倒t型滑块、111a.第二法兰机座、112a.纵切刀头旋转驱动伺服电机、113a.纵切刀头、115a.第一轴套、117a.第一激光雷达测距传感器、118a.第一圆盘、119a.第一接收线圈、120a.第一发射线圈、121a.第一直驱伺服电机、122a.第一直驱伺服电机基板;
35.200.环切装置、201a.环切刀头径向进给伺服电机、202a.第三法兰机座、203a.第二联轴器、204a.第二锁紧轴套、205a.第二轴承座、206a.第二轴承、207a.第二t型螺母、208a.第二丝杠、209a.第二倒t型滑块、211a.第四法兰机座、212a.环切刀头旋转驱动伺服电机、213a.环切刀头、215a.第二轴套、217a.第二激光雷达测距传感器、218a.第二圆盘、219a.第二接收线圈、220a.第二发射线圈、221a.第二直驱伺服电机、222a.第二直驱伺服电机基板;
36.300.底座支撑装置、301a.第一直线导轨、301b.第二直线导轨、302a.第一滑块、302b.第二滑块、303a.第三滑块、303b.第四滑块、304a.第一丝杠驱动伺服电机、304b.第二丝杠驱动伺服电机、305a.第一丝杠螺母、305b.第二丝杠螺母;
37.401.继电器、402.变压器、403.单相桥式整流电路、404.单相h桥逆变电路、405.无线耦合器、406.单相h桥整流电路、407.buk降压电路、408.蓄电池、409.无线充电模组控制器、411.纵切刀头旋转驱动伺服电机控制器、413.纵切刀头径向进给伺服电机控制器、416.第一直驱伺服电机控制器、419.第一底座丝杠驱动伺服电机控制器、420.24v开关电源、421.plc运动控制器。
具体实施方式
38.参照图1-9,一种集成无线充电与激光雷达测距的电缆剥皮方法,将电缆伸入第一直驱伺服电机121a和第二直驱伺服电机221a的中空动力输出端,根据切割位置需要,由plc运动控制器421通过信号线发送指令给第一底座丝杠驱动伺服电机控制器419和第二底座丝杠驱动伺服电机控制器,第一底座丝杠驱动伺服电机控制器419和第二底座丝杠驱动伺服电机控制器分别带动第一丝杠螺母305a和第二丝杠螺母305b旋转,使第一滑块302a和第三滑块303a在第一直线导轨301a上滑动,第二滑块302b和第四滑块303b在第二直线导轨301b上滑动,调节纵切装置100和环切装置200之间的位置,然后通过纵切装置100纵切电缆绝缘层,通过环切装置200环切绝缘层,切割过程中,220v-50hz单相交流电经24v开关电源420整流后,供电给plc运动控制器421,控制信号通过wifi/蓝牙/zigbee无线传输的方式,由plc运动控制器421发送指令给纵切刀头径向进给伺服电机控制器413,通过第一圆盘上的蓄电池供电,纵切刀头径向进给伺服电机101a带动第一丝杠108旋转,第一t型螺母107a、第一倒t滑块109a、纵切刀头113a、纵切刀头旋转驱动伺服电机112a及其控制器、第一激光雷达测距传感器117a,作为整体径向运动,通过第一激光雷达测距传感器117a的探头检测
纵切刀头113a与电缆实际外轮廓在径向的实际距离,将实际距离与理论值比较的差值,并转换成电压或者电流信号,传输到plc运动控制器421,并发送指令给纵切刀头径向进给伺服电机控制器413,通过第一丝杠108和第一t型螺母107a实时控制第一倒t滑块109a径向运动,当第一激光雷达测距传感器117a的探头与电缆外轮廓的距离重合时,纵切刀头径向进给伺服电机101a停止动作;当刀头与电缆实际外轮廓距离大于理论值时,纵切刀头径向进给伺服电机101a驱动第一滑块302a远离电缆中心方向运动;当纵切刀头113a与电缆实际外轮廓距离小于理论值时,纵切刀头径向进给伺服电机101a驱动第一滑块302a靠近电缆中心方向运动;保证纵切刀头113a运动轨迹与电缆实际外圆轮廓曲线重合,在纵切过程中,无线充电模组控制器409实时监测蓄电池408的电流和电压判断蓄电池408电量soc,蓄电池408电量soc不足时,第一无线充电模组为蓄电池408充电;
39.220v-50hz单相交流电经24v开关电源420整流后,供电给plc运动控制器421,控制信号通过wifi/蓝牙/zigbee无线传输的方式,由plc运动控制器421发送指令给环切刀头径向进给伺服电机控制器,通过第二圆盘上的蓄电池供电,环切刀头径向进给伺服电机201a带动第二丝杠208a旋转,第二t型螺母207a、第二倒t型滑块209a、环切刀头213a、纵切刀头旋转驱动伺服电机212a及其控制器、第二激光雷达测距传感器217a,作为整体径向运动,通过第二激光雷达测距传感器217a的探头检测刀头与电缆实际外轮廓在径向的实际距离,将实际距离与理论值比较的差值,并转换成电压或者电流信号,传输到plc运动控制器421,并发送指令给环切刀头径向进给伺服电机控制器,通过第二丝杠208a和第二t型螺母207a实时控制第二倒t型滑块209a径向运动,当第二激光雷达测距传感器217a的探头与电缆外轮廓的距离重合时,环切刀头径向进给伺服电机201a停止动作;当环切刀头213a与电缆实际外轮廓距离大于理论值时,环切刀头径向进给伺服电机201a驱动第二倒t型滑块209a远离电缆中心方向运动;当环切刀头213a与电缆实际外轮廓距离小于理论值时,环切刀头径向进给伺服电机201a驱动第二倒t型滑块209a靠近电缆中心方向运动;保证纵切刀头113a运动轨迹与电缆实际外圆轮廓曲线重合,在纵切过程中,无线充电模组控制器409实时监测蓄电池408的电流和电压判断蓄电池408电量soc,蓄电池408电量soc不足时,第一无线充电模组为蓄电池充电。
40.其中,第一直驱伺服电机121a和第二直驱伺服电机221a均采用24槽20极分数槽集中绕组且转子表贴式永磁电机,通过plc运动控制器421设定其旋转角度间隔检测时间,使其每旋转一个角度,在设定的时间间隔内,对电缆外绝缘的位置检测与切割作业。
41.其中,纵切刀头旋转驱动伺服电机112a采用第一圆盘118a上的蓄电池408供电,在纵切时,蓄电池408供电给三相全桥逆变电路的母线和纵切刀头旋转驱动伺服电机控制器411,纵切刀头旋转驱动伺服电机控制器411通过接收霍尔或者光电编码传感器的位置和转速信号,输出六路pwm门极驱动信号,驱动三相全桥逆变电路,从而使纵切刀头旋转驱动伺服电机驱动器411驱动纵切刀头旋转驱动伺服电机112a带动纵切刀头113a旋转切割。
42.其中,纵切刀头旋转驱动伺服电机112a、环切刀头旋转驱动伺服电机212a、纵切刀头径向进给伺服电机101a和环切刀头径向进给伺服电机201a的驱动控制方式相同
43.其中,在纵切装置100环线缆切割时,220v-50hz单相交流电经24v开关电源420整流供电给三相全桥逆变电路的母线和第一直驱伺服电机控制器416,第一直驱伺服电机控制器416通过接收霍尔传感器或者光电编码传感器的位置和转速信号,输出六路pwm门极驱
动信号,驱动三相全桥逆变电路,从而使第一直驱伺服电机121a带动第一圆盘118a转动进行环线缆切割。
44.其中,第一直驱伺服电机121a、第二直驱伺服电机221a、第一底座丝杠驱动伺服电机和第二底座丝杠驱动伺服电机的驱动控制方式相同。
45.一种集成无线充电与激光雷达测距的电缆剥皮机器人,包括纵切装置100、环切装置200和底座支撑装置300,底座支撑装置300上安装有平行两套丝杠机构,纵切装置100和环切装置200分别安装在两套丝杠机构上,纵切装置100包括纵切机构、第一直驱伺服电机基板122a和第一圆盘118a,纵切机构安装在第一圆盘118a上,第一直驱伺服电机基板122a上安装有第一直驱伺服电机121a,第一直驱伺服电机121a动力输出端轴向设置有供线缆进出的通孔,第一圆盘118a安装在第一直驱伺服电机121a动力输出端,第一直驱伺服电机基板122a和第一圆盘118a上与第一直驱伺服电机121a动力输出端对应开设有供线缆进出的开口。
46.其中,纵切机构包括第一激光雷达测距传感器117a、纵切刀头径向进给机构、第二法兰机座111a、纵切刀头113a和纵切刀头旋转驱动伺服电机112a,纵切刀头径向进给机构安装在第一圆盘118a上,第二法兰机座111a安装在切刀头径向进给机构的活动端,纵切刀头旋转驱动伺服电机112a通过螺钉固定到第二法兰机座111a上,纵切刀头113a通过第一轴套115a和螺钉固定到纵切刀头旋转驱动伺服电机112a的主轴上,第一激光雷达测距传感器117a通过螺钉固定到第二法兰机座111a上。
47.其中,纵切刀头径向进给机构包括第一轴承座105a、纵切刀头径向进给伺服电机101a、第一法兰机座102a、第一丝杠108a、第一联轴器103a和第一倒t型滑块109a,第一轴承座105a安装在第一圆盘118a上,第一轴承座105a内设有第一轴承106a,纵切刀头径向进给伺服电机101a通过螺钉配合第一法兰机座102a安装在第一轴承座105a一侧的第一圆盘118a上,第一丝杠108a一端穿过第一轴承106a另一侧通过第一联轴器103a与纵切刀头径向进给伺服电机101a传动连接,并通过第一锁紧轴套104a锁紧,第一丝杠108a上设置有第一t型螺母107a,第一倒t型滑块109a配合安装在第一t型螺母107a上。
48.其中,第一激光雷达测距传感器117a、纵切刀头113a和第一倒t型滑块109a三者在同一纵切面且通过第一圆盘118a的圆心。
49.其中,环切装置200包括环切机构、第二直驱伺服电机基板222a和第二圆盘218a,纵切机构安装在第二圆盘218a上,第二直驱伺服电机基板222a上安装有第二直驱伺服电机221a,第二直驱伺服电机221a动力输出端轴向设置有供线缆进出的通孔,第二圆盘218a安装在第二直驱伺服电机221a动力输出端,第二直驱伺服电机基板222a和第二圆盘218a上与第二直驱伺服电机221a动力输出端对应开设有供线缆进出的开口。
50.其中,环切机构包括第二激光雷达测距传感器217a、环切刀头径向进给机构、第四法兰机座211a、环切刀头213a和环切刀头旋转驱动伺服电机212a,第四法兰机211a安装在纵切刀头径向进给机构的活动端,环切刀头旋转驱动伺服电机212a通过螺钉固定到第四法兰机座211a上,纵切刀头213a通过第二轴套和螺钉固定到纵切刀头旋转驱动伺服电机212a的主轴上,第二激光雷达测距传感器217a通过螺钉固定到第四法兰机座211a上。
51.其中,环切刀头径向进给机构包括第二轴承座205a、环切刀头径向进给伺服电机201a、第三法兰机座202a、第二丝杠208a、第二联轴器203a和第二倒t型滑块209a,第二轴承
座205a安装在第二圆盘218a上,第二轴承座205a内设有第二轴承206a,环切刀头径向进给伺服电机201a通过螺钉配合第三法兰机座202a安装在第二轴承座205a两侧的第二圆盘218a上,第二丝杠208a二端穿过第二轴承206a另两侧通过第二联轴器203a与环切刀头径向进给伺服电机201a传动连接,并通过第二锁紧轴套204a锁紧,第二丝杠208a上设置有第二t型螺母207a,第二倒t型滑块209a配合安装在第二t型螺母207a上。
52.其中,第二激光雷达测距传感器217a、环切刀头213a和第二倒t型滑块209a三者在同一环切面且通过第二圆盘218a的圆心。在实际应用时,本发明的第一激光雷达测距传感器117a和第二激光雷达测距传感器217a选用深达威激光测距仪模块,支持开关数字量和模拟量输出,可以进行多个激光测距传感器组网。型号:sw-lds50b,测量距离:0.05m~50m,操作模式:单个数据/连续数据,电压电流输出:可设置0~5v/0~10v/4~20ma/0~20ma/0~24ma,供电电压12v~24v。
53.其中,第一圆盘118a和第二圆盘218a分别安装有用于对纵切机构和环切机构供电的蓄电池,第一直驱伺服电机121a和第一圆盘118a之间安装有第一无线充电模组,第一无线充电模组包括第一发射线圈120a和第一接收线圈119a,第一发射线圈120a通过螺钉安装在第一直驱伺服电机121a的端盖上,第一接收线圈119a通过螺钉安装在第一圆盘118a上,第一接收线圈119a和第一圆盘118a的蓄电池连接,第二直驱伺服电机221a和第二圆盘218a之间安装有第二无线充电模组,第二无线充电模组包括第二发射线圈220a和接第二收线圈,第二发射线圈220a通过螺钉安装在第二直驱伺服电机221a的端盖上,第二接收线圈219a通过螺钉安装在第二圆盘218a上,第二接收线圈219a和第二圆盘218a的蓄电池连接。
54.还包括有蓄电池无线充电系统,蓄电池无线充电系统包括继电器401、变压器402、单相桥式整流电路403、单相h桥逆变电路404、无线耦合器405、单相h桥整流电路406、buk降压电路407、蓄电池408和无线充电模组控制器409,220v-50hz单相交流电经继电器401连接变压器402,变压器402连接单相桥式整流电路403,单相桥式整流电路403连接单相h桥逆变电路404,单相h桥逆变电路404连接无线耦合器405的发射线圈,无线耦合器405的接收线圈连接单相h桥整流电406,单相h桥整流电路406连接buk降压电路407,buk降压电路407连接蓄电池408,无线充电模组控制器409分别连接继电器401、蓄电池408、单相h桥逆变电路404和单相h桥整流电路406。如图9所示,蓄电池无线充电系统在工作时,无线充电模组控制器409通过检测蓄电池408的端电压和电流,判断蓄电池408电量soc。当蓄电池408电量soc不足时(《80%),通过无线充电模组控制器409发送指令控制继电器401闭合,此时220v-50hz单相交流电经变压器402的变压和单相桥式整流电路403的整流,给单相h桥逆变电路404的母线供电,经单相逆变后连接无线耦合器405的发射线圈(无线充电模组的发射线圈和接收线圈即无线耦合器405的发射线圈和耦合线圈),经电磁感应将能量传递给无线耦合器405的接收线圈,经单相h桥可控整流电路406和dcdc降压电路407,给蓄电池408充电。
55.其中,底座支撑装置300两侧还分别设置有第一直线导轨301a和第二直线导轨301b,并在第一直线导轨301a上设置有第一滑块302a和第三滑块303a,第二直线导轨301b上设置有第二滑块302b和第四滑块303b,第一直驱伺服电机基板122a两侧通过螺钉分别与第一滑块302a和第二滑块302b连接,第二直驱伺服电机基板222a两侧通过螺钉分别与第三滑块303a和第四滑块303b连接。
56.其中,两套丝杠机构分别为第一丝杠螺母305a和第二丝杠螺母305b,底座支撑装
置300一端还安装有第一丝杠驱动伺服电机304a和第二丝杠驱动伺服电机304b,第一丝杠螺母305a采用第一丝杠驱动伺服电机304a驱动,第二丝杠螺母305b采用第二丝杠驱动伺服电机304b驱动。
57.其中,第一直驱伺服电机121a和第二直驱伺服电机221a均采用24槽20极分数槽集中绕组且转子表贴式永磁电机。
58.本发明在电缆剥皮过程中,通过在纵切装置100和环切装置200与底座支撑装置300连接处设计直线导轨滑块,其中两组滑块分布固定到纵切装置100和环切装置200上,导轨固定到底座平台上,通过底座支撑装置300的两组伺服电机驱动相应的两组丝杠螺母机构,推动纵切装置100和环切装置200在底座平台沿着导轨纵向滑移,从而实现解决纵切装置100和环切装置200在底座平台滑移摩擦卡顿的问题。并且在直驱电机的端盖与圆盘侧端面之间设计一组无线充电模组,通过检测蓄电池电量soc决定是否充电,从而保证纵切装置100和环切装置200在工作中的续航时间。在刀头驱动伺服电机的法兰机座上安装激光雷达测距传感器,激光雷达测距传感器是一种非接触式传感器,在每一个时间步长内,采集刀头与电缆实际轮廓在径向的实际距离数据。通过激光雷达测距传感器的探头实时检测探头与电缆外轮廓的距离,若距离大于设计值时,径向进给伺服电机驱动倒t型滑块靠近圆心方向运动;若距离小于设计值时,径向进给伺服电机驱动倒t型滑块远离圆心方向运动,若检测探头与电缆外轮廓的距离重合时,则径向进给伺服电机停止动作。从而保证刀头运动轨迹与电缆实际外圆轮廓曲线重合,提高电缆剥皮的精度。
59.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1