输送系统、处理系统和物品制造方法与流程
1.本公开涉及输送系统、处理系统和制造物品的方法。
背景技术:
2.一般而言,在用于组装工业产品、半导体曝光装置等的生产线中使用输送系统。特别地,生产线中的输送系统通过多个动子(mover)在工厂自动化生产线内的多个站点之间或工厂自动化生产线之间输送诸如部件之类的工件。另外,这种输送系统可以用作处理装置内的输送装置。作为输送系统,已经提出了使用线性马达的输送系统和磁悬浮输送系统。
3.在这些输送系统中,多个动子输送诸如部件之类的工件,并且每个动子都有移动机器差异,该移动机器差异是在动子移动时由于传感器的读取表面的加工误差或组装误差引起的位置误差。
4.因而,日本专利no.5753060公开了一种方法,该方法在使用线性马达的输送系统中控制电磁铁的电流流动,从而通过使用用于校正每个滑架的位置的数据来使滑架(carriage)停止在目标停止位置,该数据是基于使用公共测量夹具(jig)预先测量的每个滑架的移动机器差异来确定的。
技术实现要素:
5.根据本公开的一方面,一种输送系统包括被配置为在第一方向上可移动的动子;具有布置在第一方向上的多个线圈并被配置为在使用向其施加电流的该多个线圈以在与第一方向相交的第二方向上悬浮动子的同时施加力以在第一方向上输送动子的定子(stator);以及被配置为控制施加到该多个线圈的电流以控制动子的操作的控制单元,其中控制单元被配置为使用动子的机器差异信息来控制施加到该多个线圈的电流,以在动子被悬浮时控制动子的姿态。
6.通过参考附图对示例性实施例的以下描述,本公开的其它特征将变得清楚。
附图说明
7.图1是例示根据本公开的第一实施例的输送系统的配置的示意图。
8.图2是例示根据本公开的第一实施例的输送系统的配置的示意图。
9.图3是例示根据本公开的第一实施例的输送系统中的线圈和线圈相关配置的示意图。
10.图4是例示用于控制根据本公开的第一实施例的输送系统的控制系统的示意图。
11.图5a是例示获取用于校正根据本公开的第一实施例的输送系统中的动子的移动机器差异的校正值的方法的示意图。
12.图5b是例示获取用于校正根据本公开的第一实施例的输送系统中的移动机器差异的校正值的方法的示意图。
13.图6是例示获取用于校正本公开的第一实施例的输送系统中的动子的移动机器差
异的校正值的方法中所获取的数据的示例的示意图。
14.图7是例示根据本公开的第一实施例的输送系统中的动子的姿态控制方法的示意图。
15.图8是例示用于控制根据本公开的第一实施例的输送系统中动子的位置和姿态的控制块的示例的示意图。
16.图9a是例示根据本公开的第一实施例的输送系统中的动子位置计算功能的处理的示意图。
17.图9b是例示根据本公开的第一实施例的输送系统中的动子位置计算功能的处理的示意图。
18.图10是例示根据本公开的第一实施例的输送系统中的动子姿态计算功能的处理的示意图。
19.图11a是例示根据本公开的第一实施例的输送系统中的动子姿态计算功能的处理的示意图。
20.图11b是例示根据本公开的第一实施例的输送系统中的动子姿态计算功能的处理的示意图。
21.图12是例示根据本公开的第一实施例的输送系统中作用在附接到动子的轭板上的力与作用在动子上的分力量和扭矩分量之间的关系的示意图。
22.图13是示意性地例示根据本公开的第一实施例的输送系统中在z方向上的推力常数曲线(profile)的曲线图。
23.图14a是例示根据本公开的第一实施例的输送系统中的定子线圈的示意图。
24.图14b是例示根据本公开的第一实施例的输送系统中的定子线圈的示意图。
25.图15是示意性地例示在根据本公开的第一实施例的输送系统中施加到线圈的电流量与作用在线圈和轭板之间的吸引力的量值之间的关系的曲线图。
26.图16是在根据本公开的第一实施例的输送系统中沿着z方向从上到下查看的动子的示意图。
27.图17是示意性地例示在根据本公开的第一实施例的输送系统中在y方向上的吸引力曲线的曲线图。
28.图18a是例示在根据本公开的第二实施例的输送系统中用于在整个线性标尺上获取动子在x方向上的位置的机器差异的方法的示意图。
29.图18b是例示在根据本公开的第二实施例的输送系统中用于在整个线性标尺上获取动子在x方向上的位置的机器差异的方法的示意图。
30.图19是示出在根据本公开的第二实施例的输送系统中当动子在多个z轴辊上在x方向上滑动以便被移动时激光干涉仪测量结果与线性编码器测量结果之间的差异的曲线图。
31.图20是例示在根据本公开的第三实施例的输送系统中用于控制动子的位置和姿态的控制块的示例的示意图。
32.图21a是例示在根据本公开的第四实施例的输送系统中测量动子的重量的方法的示意图。
33.图21b是例示在根据本公开的第四实施例的输送系统中测量动子的重量的方法的
示意图。
具体实施方式
34.第一实施例
35.下面将参考图1至图17描述本公开的第一实施例。
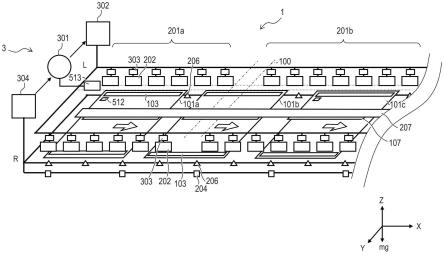
36.首先,将参考图1至图3描述根据本实施例的输送系统1的配置。图1和图2是例示根据本实施例的包括动子101和定子201的输送系统1的配置的示意图。注意的是,图1和图2分别是各个动子101和各个定子201的提取的主要部分的视图。另外,图1是从斜上方查看时动子101的图,而图2是从稍后描述的x方向查看时动子101和定子201的图。图3是例示输送系统1中的线圈202、207和208以及与线圈202、207和208相关的配置的示意图。
37.如图1和图2中所示,根据本实施例的输送系统1具有形成载体、滑架或滑块的动子101和形成输送路径的定子201。另外,输送系统1具有集成控制器301、线圈控制器302、线圈单元控制器303和传感器控制器304。注意的是,图1将三个动子101a、101b和101c例示为动子101并将两个定子201a和201b例示为定子201。在以下的描述中,在没有特别要求对诸如动子101和定子201之类的可以作为多个部件存在的部件进行区分的情况下,使用仅包括与其它部件共用的数字的附图标记,并在必要时向数字附图标记附加小写字母以区分个体。另外,当彼此区分动子101的r侧的部件与动子101的l侧的部件时,将指示r侧的“r”或指示l侧的“l”附加到小写字母。
38.根据本实施例的输送系统1是具有感应式线性马达的输送系统,该线性马达在定子201的线圈207和动子101的导电板107之间生成电磁力并在x方向上向动子101施加推力。另外,根据本实施例的输送系统1是使动子101悬浮并以非接触方式输送动子101的磁悬浮式输送系统。根据本实施例的输送系统1一起形成具有对由动子101输送的工件102执行处理的处理装置的处理系统的一部分。
39.例如,输送系统1通过由定子201输送动子101将由动子101所保持的工件102输送到对工件102进行处理操作的处理装置。处理装置没有特别限制,并且可以是例如在作为工件102的玻璃基板上形成膜的膜形成装置,诸如气相沉积装置、溅射装置等。注意的是,虽然图1例示了用于两个定子201的三个动子101,但是数量不限于此。在输送系统1中,一个或多个动子101可以在一个或多个定子201上被输送。
40.在本文中,定义在以下描述中使用的坐标轴、方向等。首先,沿着作为动子101的输送方向的水平方向取x轴,并且动子101的输送方向被定义为x方向。另外,沿着作为与x方向正交的方向的垂直方向取z轴,并且该垂直方向被定义为z方向。垂直方向与重力的方向(mg方向)对应。另外,沿着与x方向和z方向正交的方向取y轴,并且将与x方向和z方向正交的方向定义为y方向。此外,绕x轴的旋转方向被定义为wx方向,绕y轴的旋转方向被定义为wy方向,并且绕z轴的旋转方向被定义为wz方向。另外,“*”被用作乘法符号。另外,动子101的中心被定义为原点oc,y+侧被表示为r侧,并且y-侧被表示为l侧。注意的是,虽然动子101的输送方向不一定要求是水平方向,但是在输送方向被定义为x方向的这种情况下,y方向和z方向也可以类似地被定义。注意的是,x方向、y方向和z方向不一定限于彼此正交的方向并且可以被定义为彼此交叉的方向。另外,输送方向的位移被定义为位置,其它方向的位移被定义为姿态,并且位置和姿态一起被定义为状态。
41.另外,以下描述中使用的符号如下。注意的是,每个符号以重复的方式用于线圈202、207和208的相应情况。
42.oc:动子101的原点
43.os:线性标尺104的原点
44.oe:定子201的原点
45.j:用于识别线圈的索引
46.(注意的是,j是满足1≤j≤n的整数,其中n是大于或等于2的整数。)
47.n:所安装的线圈的数量
48.ij:施加到第j个线圈的电流量
49.p:包括动子101的位置和姿态的状态(x、y、z、wx、wy、wz)
50.x(j,p):在状态p下从动子101的中心查看时第j个线圈的x坐标
51.y(j,p):在状态p下从动子101的中心查看时第j个线圈的y坐标
52.z(j,p):在状态p下从动子101的中心查看时第j个线圈的z坐标
53.t:施加到动子101的力
54.tx:力t在x方向上的力分量
55.ty:力t在y方向上的力分量
56.tz:力t在z方向上的力分量
57.twx:力t在wx方向上的扭矩分量
58.twy:力t在wy方向上的扭矩分量
59.twz:力t在wz方向上的扭矩分量
60.ex(j,p):当单位电流施加到第j个线圈时,在状态p下作用于动子101的x方向上的力
61.ey(j,p):当单位电流施加到第j个线圈时,在状态p下作用于动子101的y方向上的力
62.ez(j,p):当单位电流施加到第j个线圈时,在状态p下作用于动子101的z方向上的力
63.σ:当索引j从1变为n时的总和
64.*:矩阵或向量的乘积
65.m:扭矩贡献矩阵
66.k:伪电流向量(列向量)
67.tq:扭矩向量(列向量)
68.is:线圈电流向量(列向量)
69.fs:线圈力向量(列向量)
70.m(a.b):矩阵m的第a行第b列上的元素
71.inv():逆矩阵
72.tr():转置矩阵
73.tr(元素1,元素2,...):列向量,其元素为元素1,元素2,...
74.如图1中的箭头所指示的,动子101被配置为可在作为输送方向的x方向上移动。动子101具有轭板103和导电板107。另外,动子101具有线性标尺104、y目标105和z目标106。动
子101还包括rfid(射频标识)标签512,它是信息介质,其中注册了用于识别每个动子101的标识信息。
75.多个轭板103附接并安装在动子101的多个部分上。具体而言,轭板103在动子101的顶面上的r侧和l侧的相应端部处沿着x方向附接和安装。另外,在动子101的r侧和l侧的相应侧面处沿着x方向附接和安装轭板103。每个轭板103是由具有大磁导率的物质(例如,铁)制成的铁板。
76.导电板107在动子101的顶面上的中心部分处沿着x方向附接和安装。导电板107没有特别限制,只要具有导电性即可,诸如导电金属板,并且具有小电阻的铝板等是优选的。
77.注意的是,轭板103和导电板107的安装位置及其数量不限于上述示例并且可以适当地改变。
78.线性标尺104、y目标105和z目标106附接并安装在动子101中可以分别由安装在定子201上的线性编码器204、y传感器205和z传感器206读取的位置处。
79.rfid标签512附接到动子101以安装在动子101中可由rfid读取器513读取的位置处。rfid读取器513安装在输送系统1中动子101的输送路径的特定位置处。作为标识信息的个体id(identification,标识)被注册在rfid标签512中以识别rfid标签512附接到的动子101。代替rfid标签512,动子101可以设置有指示动子101的个体id的诸如qr码(注册商标)之类的信息介质。在这种情况下,代替rfid读取器513,可以根据信息介质使用从信息介质读取个体id的诸如扫描仪之类的读取器。
80.定子201具有线圈202、207和208、线性编码器204、y传感器205,以及z传感器206。
81.多个线圈202沿着x方向附接并安装在定子201上,以便能够沿着z方向面对安装在动子101的顶面上的轭板103。具体而言,多个线圈202布置并安装在平行于x方向的两条线上,以便能够从z方向上的顶部面对安装在动子101的顶面上的r侧和l侧的相应端部处的两个轭板103。
82.多个线圈208沿着x方向附接并安装到定子201,以便能够沿着y方向面对安装在动子101的侧面上的轭板103。具体而言,多个线圈208布置并安装在平行于x方向的两条线上,以便能够从y方向的一侧面对安装在动子101的r侧和l侧的相应侧面上的两个轭板103。
83.多个线圈207沿着x方向附接并安装在定子201上,以便能够沿着z方向面对安装在动子101的顶面上的导电板107。具体而言,多个线圈207布置并安装在平行于x方向的单条线上,以便能够从z方向的顶部面对安装在动子101的顶面上的中心部分处的导电板107。
84.定子201向动子101施加力,动子101通过施加有电流的相应线圈202、207和208在输送方向上可移动。由此,动子101在其位置和姿态被控制的同时在输送方向上被输送。
85.注意的是,线圈202、207和208的安装位置不限于上述示例并且可以适当地改变。另外,可以适当改变所安装的线圈202、207和208的数量。
86.线性编码器204、y传感器205和z传感器206用作检测在输送方向上移动的动子101的位置和姿态的检测单元。
87.线性编码器204附接并安装在定子201上,以便能够读取安装在动子101上的线性标尺104。线性编码器204通过读取线性标尺104来检测动子101相对于线性编码器204的相对位置。
88.y传感器205附接并安装在定子201上,以便能够检测在y方向上到安装在动子101
上的y目标105的距离。z传感器206附接并安装在定子201上,以便能够检测在z方向上到安装在动子101上的z目标106的距离。
89.例如,动子101被配置为在工件102附接或保持在动子101的上方或下方的情况下被输送。注意的是,图2例示了工件102附接在动子101下方的状态。注意的是,用于将工件102附接或保持到动子101的机构没有特别限制,并且可以使用诸如机械钩、静电卡盘等的一般附接机构、一般保持机构等。
90.注意的是,图2例示了动子101和定子201被嵌入气相沉积装置701的腔室内的情况,气相沉积装置701是对工件102执行处理操作的处理装置的示例。气相沉积装置701具有气相沉积源702,气相沉积源702对附接到动子101的工件102执行沉积。气相沉积源702安装在气相沉积装置701的腔室内的下部,使得气相沉积源702可以面向附接在动子101下方的工件102。利用使用气相沉积源702的气相沉积,在输送到气相沉积源702的安装地方的动子101下方附接的作为工件102的基板上形成金属、氧化物等的薄膜。以这种方式,工件102与动子101一起被输送,由处理装置对被输送的工件102执行处理,并制造物品。
91.另外,图1例示了包括例如在定子201a和定子201b之间存在结构100(诸如闸阀)的地方的区域。存在结构100的地方是位于生产线内的多个站点之间或生产线之间并且不可以连续布置电磁体或线圈的地方。
92.控制输送系统1的控制系统3被提供给输送系统1。注意的是,控制系统3可以形成输送系统1的一部分。控制系统3具有集成控制器301、线圈控制器302、线圈单元控制器303和传感器控制器304。线圈控制器302和传感器控制器304以可通信的方式连接到集成控制器301。多个线圈单元控制器303以可通信的方式连接到线圈控制器302。多个线性编码器204、多个y传感器205和多个z传感器206以可通信的方式连接到传感器控制器304。线圈202、207和208连接到每个线圈单元控制器303(参见图3)。
93.集成控制器301基于从传感器控制器304传输的来自线性编码器204、y传感器205和z传感器206的输出来确定要施加到多个线圈202、207和208的电流指令值。集成控制器301将确定的电流指令值传输到线圈控制器302。线圈控制器302将从集成控制器301接收到的电流指令值传输到相应的线圈单元控制器303。线圈单元控制器303基于从线圈控制器302接收到的电流指令值来控制连接的线圈202、207和208的电流量。
94.rfid读取器513以可通信的方式连接到集成控制器301。rfid读取器513通过读取动子101的rfid标签512来获取动子101的个体id。rfid读取器513将获取的个体id传输到集成控制器301。集成控制器301可以接收并识别从rfid读取器513传输的动子101的个体id以识别动子101。rfid读取器513安装在由定子201构成的输送路径中的一个或多个位置处。
95.如图3中所示,一个或多个线圈202、207和208连接到各个线圈单元控制器303。电流传感器312和电流控制器313连接到线圈202、207和208中的每一个。电流传感器312检测在连接的线圈202、207和208中流动的电流值。电流控制器313控制在连接的线圈202、207和208中流动的电流量。
96.线圈单元控制器303基于从线圈控制器302接收到的电流指令值向电流控制器313指示期望的电流量和使电流流动的定时。电流控制器313检测由电流传感器312检测到的电流值并控制电流量,使得期望电流量的电流在各个线圈202、207和208中流动。
97.接下来,将参考图4进一步描述控制根据本实施例的输送系统1的控制系统3。图4
是例示控制根据本实施例的输送系统1的控制系统3的示意图。
98.如图4中所示,控制系统3具有集成控制器301、线圈控制器302、线圈单元控制器303和传感器控制器304。控制系统3用作控制包括动子101和定子201的输送系统1的控制单元。线圈控制器302、传感器控制器304和rfid读取器513以可通信的方式连接到集成控制器301。
99.多个线圈单元控制器303以可通信的方式连接到线圈控制器302。线圈控制器302和与其连接的多个线圈单元控制器303与线圈202、207和208的相应列相关联地设置。线圈202、207和208连接到各个线圈单元控制器303。线圈单元控制器303可以控制连接的线圈202、207和208的电流电平。
100.线圈控制器302向连接的线圈单元控制器303中的每一个指示目标电流值。线圈单元控制器303控制连接的线圈202、207和208的电流量。
101.多个线性编码器204、多个y传感器205和多个z传感器206以可通信的方式连接到传感器控制器304。
102.多个线性编码器204间隔地附接到定子201,使得即使在动子101的输送期间,线性编码器204之一也可以始终测量一个动子101的位置。另外,多个y传感器205间隔地附接到定子201,使得y传感器205中的两个可以始终测量一个动子101的y目标105。另外,多个z传感器206间隔地附接到定子201,使得两排z传感器206中的三个可以始终测量一个动子101的z目标106,从而形成平面。
103.集成控制器301基于来自线性编码器204、y传感器205和z传感器206的输出来确定要施加到多个线圈202的电流指令值,并将电流指令值传输到线圈控制器302。如上所述,线圈控制器302基于来自集成控制器301的电流指令值向线圈单元控制器303指示电流值和使电流流动的定时。因而,集成控制器301用作沿着定子201以非接触方式输送动子101并在六个轴上控制被输送的动子101的姿态的控制单元。
104.集成控制器301可以通过从已经读取了附接到动子101的rfid标签512的rfid读取器513接收的动子101的个体id来识别动子101。因此,集成控制器301可以通过将各个参数应用于相应动子101来控制动子101的操作。
105.接下来,将参考图5a和图5b描述根据本实施例的获取用于校正动子101的移动设备的移动机器差异的校正值的方法。图5a和图5b是例示根据本实施例的输送系统1中获取用于校正移动机器差异的校正值的方法的示意图,并且例示了在获取校正值时多个动子101共同使用的公共测量夹具500。图5a例示了在-x方向上查看的公共测量夹具500。图5b例示了在-z方向上查看的公共测量夹具500。
106.公共测量夹具500具有与定子201的线性编码器相似的线性编码器204和作为距离测量手段的激光位移计502。线性编码器204安装在公共测量夹具500上,从而可以读取安装在公共测量夹具500上的动子101的线性标尺104。激光位移计502安装在公共测量夹具500上以检测安装在公共测量夹具500上的动子101在x方向上的位置。公共测量夹具500被用于针对多个动子101中的每一个获取作为关于动子101的移动机器差异的信息的机器差异信息。为其获取机器差异信息的动子101的机器差异包括x、y和z方向中的每个方向上的机器差异。
107.在公共测量夹具500中,通过由线性编码器204读取动子101的线性标尺104,可以
检测安装在公共测量夹具500中的动子101在x方向上的位置。也安装在公共测量夹具500中的动子101在x方向上的位置可以通过使用激光位移计502的测量来检测。
108.可通过使用rfid读取器513读取安装在公共测量夹具500中的动子101的rfid标签512来识别动子101。
109.动子101安装在公共测量夹具500中以模拟动子101的悬浮状态。在这种情况下,动子101可以被支撑在贝塞尔点501处,或者可以使用邻接部(未示出)作为参考。在公共测量夹具500中,重要的是对多个动子101执行具有良好再现性的共用安装。
110.在此,在动子101的z目标106当中,布置在+y方向侧(朝着作为前进方向的+x方向的右侧)的z目标106被定义为z目标106r。在动子101的z目标106中,布置在-y方向侧(朝着作为前进方向的+x方向的左侧)的z目标106被定义为z目标106l。
111.在获取用于校正移动机器差异的校正值时,安装在公共测量夹具500中的动子101由三维测量机器503和激光位移计502测量。具体而言,三维测量机器503沿着x方向测量y目标105在y方向上的位置、z目标106r在z方向上的位置以及z目标106l在z方向上的位置。在测量中,为了减少校正数据的量,例如可以在x方向上以1mm为增量执行测量。动子101在x方向上的位置由激光位移计502测量。
112.类似地,关于多个动子101,y目标105在y方向上的位置、z目标106r在z方向上的位置和z目标106l在z方向上的位置由三维测量机器503沿着x方向测量。类似地,多个动子101在x方向上的位置由激光位移计502测量。
113.图6示出了如上文所述测量的针对动子101的y目标105、z目标106r和z目标106l的数据的示例。
114.在图6中,上部例示了要测量的y目标105、z目标106r和z目标106l,并且下部示出了测得的数据的曲线图。在下部所示的曲线图中,水平轴指示测量点的x轴的位置。垂直轴指示当动子101安装在公共测量夹具500中时通过从设计值中减去测得的值而获得的值作为误差err。在曲线图中,err105表示y目标105的误差err,err106r表示z目标106r的误差err,并且err106l表示z目标106l的误差err。
115.误差err是由传感器读取的每个目标的目标表面与设计值的偏差。即,当y传感器205读取y目标105时,err105成为各个动子101独有的读数误差。当z传感器206读取z目标106r时,err106r成为各个动子101独有的读数误差。当z传感器206读取z目标106l时,err106l成为各个动子101独有的读数误差。
116.y传感器205的读数误差和z传感器206的读数误差成为各个动子101在悬浮时的姿态的移动机器差异。在下文中,y传感器205的读数误差被表示为cy,并且z传感器206的读数误差被表示为cz。读数误差cy是动子101在y方向上的移动机器差异。读数误差cz是动子101在z方向上的移动机器差异。读数误差cy和cz被用作用于在动子101的输送控制中校正动子101的移动机器差异的校正值。
117.注意的是,当测得的数据用作校正值时,测量点之间的数据可以通过使用诸如拉格朗日插值之类的方法从多个测量点进行插值。
118.这些读数误差cy和cz与注册在rfid标签512中的动子101的个体id被集成控制器301相关联,并且被存储在诸如半导体存储设备、磁存储设备等的存储单元中,作为传感器的机器差异信息521(参见图7)。注意的是,读数误差cy和cz可以存储在集成控制器301可以
参考的外部存储设备中。
119.另一方面,基于激光位移计502的测量结果,动子101在x方向上的位置的机器差异cx可以通过以下等式(x1)计算。
120.cx=(ref_lx-lx)-(ref_ex-ex)
…
等式(x1)
121.在本文中,ex、lx、ref_lx、ref_ex分别表示以下内容。
122.ex:安装在公共测量夹具500上的线性编码器204的测得的值
123.lx:激光位移计502的测得的值
124.ref_lx:从激光位移计502到动子101的x方向上的位置的设计值
125.ref_ex:线性编码器204的附接位置的设计值
126.因此,获取作为动子101在x方向上的移动机器差异的机器差异cx。x方向上的位置的该机器差异cx与注册在rfid标签512中的动子101的个体id被集成控制器301相关联,并作为x方向上的差异信息520(参见图7)存储在诸如半导体存储设备、磁存储设备等的存储单元中。注意的是,机器差异cx可以存储在集成控制器301可以参考的外部存储设备中。
127.在下文中,下面将参考图7描述由集成控制器301执行的动子101的姿态控制方法。图7是例示根据本实施例的输送系统1中的动子101的姿态控制方法的示意图。图7主要以数据流为中心例示了动子101的姿态控制方法的概述。集成控制器301执行使用如下所述的动子位置计算功能401、动子姿态计算功能402、动子姿态控制功能403和线圈电流计算功能404的处理。因而,集成控制器301在控制动子101在六个轴上的姿态的同时控制动子101的输送。注意的是,代替集成控制器301,线圈控制器302可以执行与集成控制器301相同的处理。
128.首先,动子位置计算功能401根据来自多个线性编码器204的测得的值、关于其附接位置的信息和动子101在x方向上的机器差异信息520来计算构成输送路径的定子201上的动子101的数量和位置。此时,动子位置计算功能401可以通过使用动子101的与注册在rfid标签512中的个体id相关联地存储的x方向上的机器差异信息520来针对每个动子101校正移动机器差异。
129.根据以上计算,动子位置计算功能401更新作为关于动子101的信息的动子信息406中的动子位置信息(x)和单元数信息。动子位置信息(x)指示动子101在x方向上的位置,x方向是动子101在定子201上的输送方向。例如,如图7中的pos-1、pos-2、...所示,针对定子201上的每个动子101准备动子信息406。
130.接下来,动子姿态计算功能402根据由动子位置计算功能401更新的动子信息406中的动子位置信息(x)来指定能够测量各个动子101的y传感器205和z传感器206。
131.接下来,动子姿态计算功能402计算作为关于各个动子101的姿态的信息的姿态信息(y,z,wx,wy,wz),并且更新动子信息406。动子姿态计算功能402基于从指定的y传感器205和z传感器206输出的值以及y目标105、z目标106r和z目标106l的传感器的机器差异信息521来计算姿态(y,z,wx,wy,wz)。此时,动子姿态计算功能402可以通过使用与注册在动子101的rfid标签512中的个体id相关联地存储的传感器的机器差异信息521来校正个体动子101的机器差异。由动子姿态计算功能402更新的动子信息406包括动子位置信息(x)和姿态信息(y,z,wx,wy,wz)。
132.接下来,动子姿态控制功能403根据包括动子位置信息(x)和姿态信息(y,z,wx,
wy,wz)的当前动子信息406和姿态目标值来针对各个动子101计算作用力信息408。作用力信息408是与要施加到各个动子101的力的量值相关的信息。作用力信息408包括关于要施加的力t的力的三轴分量(tx,ty,tz)和力t的扭矩的三轴分量(twx,twy,twz)的信息。例如,如图7中的trq-1、trq-2、...所指示的,为定子201上的每个动子101准备作用力信息408。
133.在本文中,作为力的三轴分量的tx、ty和tz分别是力的x方向分量、y方向分量和z方向分量。另外,作为扭矩的三轴分量的twx、twy和twz分别是扭矩的绕x轴的分量、绕y轴的分量和绕z轴的分量。根据本实施例的输送系统1通过控制力t的这些六轴分量(tx,ty,tz,twx,twy,twz)在控制动子101在六个轴上的姿态的同时控制动子101的输送。
134.接下来,线圈电流计算功能404基于作用力信息408和动子信息406确定施加到相应线圈202、207和208的电流指令值409。
135.以这种方式,集成控制器301通过执行使用动子位置计算功能401、动子姿态计算功能402、动子姿态控制功能403和线圈电流计算功能404的处理来确定电流指令值409。集成控制器301将确定的电流指令值409传输到线圈控制器302。
136.将参考图8进一步详细描述对动子101的位置和姿态的控制。图8是例示用于控制动子101的位置和姿态的控制块的示例的示意图。
137.在图8中,符号p表示动子101的位置和姿态(也称为位置和姿态或状态)并且具有分量(x,y,z,wx,wy,wz)。符号ref表示(x,y,z,wx,wy,wz)的目标值。符号err表示目标值ref与位置和姿态p之间的偏差。
138.动子姿态控制功能403基于偏差err的量值、偏差err的改变、偏差err的累积值等来计算要施加到动子101以实现目标值ref的力t。
139.线圈电流计算功能404基于要施加的力t以及位置和姿态p来计算为了将力t施加到动子101而要施加到线圈202、207和208的线圈电流i。以这种方式计算的线圈电流i被施加到线圈202、207和208,从而力t作用在动子101上,并且位置和姿态p变为目标值ref。
140.通过以这种方式配置控制块,可以将动子101的位置和姿态p控制到期望的目标值ref。
141.现在将参考图9a和图9b描述根据动子位置计算功能401的处理。图9a和图9b是例示根据动子位置计算功能的处理的示意图。
142.在图9a中,参考点oe与线性编码器204附接到的定子201的位置参考对应。另外,参考点os与附接到动子101的线性标尺104的位置参考对应。图9a例示了其中两个动子101a和101b作为动子101被输送并且三个线性编码器204a、204b和204c作为线性编码器204被布置的情况。注意的是,线性标尺104沿着x方向附接到相应动子101a和101b的相同位置。
143.例如,单个线性编码器204c面向图9a中所示的动子101b的线性标尺104。线性编码器204c读取动子101b的线性标尺104并输出距离pc。另外,线性编码器204c在原点为参考点oe的x轴上的位置是sc。因此,动子101b的位置pos(101b)可以通过以下等式(1)计算。
144.pos(101b)=sc-pc
…
等式(1)
145.例如,两个线性编码器204a和204b面向图9a中所示的动子101a的线性标尺104。线性编码器204a读取动子101a的线性标尺104并输出距离pa。另外,线性编码器204a在原点为参考点oe的x轴上的位置是sa。因此,基于线性编码器204a的输出的动子101a的x轴上的位置pos(101a)可以通过以下等式(2)计算。
146.pos(101a)=sa-pa
…
等式(2)
147.另外,线性编码器204b读取动子101a的线性标尺104并输出距离pb。另外,线性编码器204b在原点为参考点oe的x轴上的位置是sb。因此,基于线性编码器204b的输出的动子101a的x轴上的位置pos(101a)
′
可以通过以下等式(3)计算。
148.pos(101a)
′
=sb-pb
…
等式(3)
149.在本文中,由于线性编码器204a和204b的相应位置已经被预先准确地测量,因此两个值pos(101a)与pos(101a)'的差异足够小。当基于两个线性编码器204的输出的动子101在x轴上的位置的差异以这种方式足够小时,可以确定这两个线性编码器204正在观察同一个动子101的线性标尺104。
150.注意的是,当多个线性编码器204面对同一个动子101时,可以通过基于多个线性编码器的输出等来计算位置的平均值以唯一地确定观察的动子101的位置204。
151.另外,动子101可以绕z轴旋转旋转量wz。将利用图9b描述要求使用这个旋转量wz的位移来校正动子101的位置的情况。图9b例示了线性标尺104被附接到动子101b的y方向上的侧面之一的情况。位置os是线性标尺104的原点,并且位置oc是动子101b的原点。当从动子101的中心oc到线性标尺104的距离为d时,可以通过使用以下等式(1b)计算动子101b的位置pos(101b)来获得动子101b的更准确的位置pos(101b)。
152.pos(101b)=sc-pc-wz*d
…
等式(1b)
153.另外,考虑到作为动子101b在x方向上的位置的移动机器差异的机器差异cx(101b),可通过使用以下等式(1c)来计算动子101b的位置pos(101b)以获得动子101b的更准确位置。
154.pos(101b)=sc
–
pc-wz*d+cx(101b)...等式(1c)
155.如上所述,动子位置计算功能401基于线性编码器204的输出来计算并确定动子101在x方向上的位置x作为动子位置信息。当计算位置x时,动子位置计算功能401可以通过考虑动子101在x方向上的位置的机器差异cx来校正相应动子101的移动机器差异。
156.接下来,将参考图10、图11a和图11b描述通过使用动子姿态计算功能402的处理。
157.图10例示了一种情况,其中动子101c作为动子101被输送,并且y传感器205a和205b作为y传感器205被布置。两个y传感器205a和205b面向图10中所示的动子101c的y目标105。动子101c绕z轴的旋转量wz由以下等式(4)计算,其中两个y传感器205a和205b输出的相对距离的值分别是ya和yb,并且y传感器205a和205b之间的间距是ly。
158.wz=(ya-yb)/ly
…
等式(4)
159.在本文中,y传感器205a和205b的读数误差cy分别由读数误差cy(205a,101c)和cy(205b,101c)表示。然后,可以分别考虑读数误差cy(205a,101c)和cy(205b,101c)来校正y传感器205a和205b的输出的值ya和yb。分别考虑读数误差cy(205a,101c)和cy(205b,101c)进行校正之后的y传感器205a和205b的输出值ya'和yb'分别由以下等式(4a)和(4b)表示。
160.ya
′
=ya+cy(205a,101c)
…
等式(4a)
161.yb
′
=yb+cy(205b,101c)
…
等式(4b)
162.考虑到y传感器205a和205b的读数误差cy(205a,101c)和cy(205b,101c)的动子101c绕z轴的经校正旋转量wz'由以下等式(4c)计算。
163.wz
′
=(ya
′‑
yb
′
)/ly
…
等式(4c)
164.注意的是,取决于动子101的位置,三个或更多个y传感器205可以面向动子101的y目标105。在这种情况下,可以使用最小二乘法等计算y目标105的倾斜度,即,绕z轴的旋转量wz'。
165.图11a和图11b例示了其中动子101d作为动子101被输送,并且z传感器206a、206b和206c作为z传感器206被布置的情况。三个z传感器206a、206b和206c面向图11a和图11b中所示的动子101d的z目标106。在本文中,由三个z传感器206a、206b和206c输出的相对距离的值分别是za、zb和zc。另外,x方向上的传感器之间的距离(即,z传感器206a和206b之间的距离)是lz1。另外,y方向上的传感器之间的距离(即,z传感器206a和206c之间的距离)是lz2。然后,绕y轴的旋转量wy和绕x轴的旋转量wx可以分别通过以下等式(5a)和(5b)计算。
166.wy=(zb-za)/lz1
…
等式(5a)
167.wx=(zc-za)/lz2
…
等式(5b)
168.z传感器206a、206b和206c的读数误差cz分别由cz(206a,101d)、cz(206b,101d)和cz(206c,101d)表示。然后,可以分别考虑读数误差cz(206a,101d)、cz(206b,101d)和cz(206c,101d)来校正z传感器206a、206b和206c的输出的值za、zb和zc。考虑到读数误差cz(206a,101d)、cz(206b,101d)和cz(206c,101d)的z传感器206a、206b和206c的经校正的输出值za'、zb'和zc'分别由以下等式(5c)、(5d)和(5e)表示。
169.za
′
=za+cz(206a,101d)
…
等式(5c)
170.zb
′
=zb+cz(206b,101d)
…
等式(5d)
171.zc
′
=zc+cz(206c,101d)
…
等式(5e)
172.考虑到z传感器206a和206b的读数误差cz(206a,101d)和cz(206b,101d),动子101d绕y轴的经校正旋转量wy'可以通过以下等式(5f)计算。
173.wy
′
=(zb
′‑
za
′
)/lz1
…
等式(5f)
174.考虑到z传感器206a和206c的读数误差cz(206a,101d)和cz(206c,101d),动子101d绕x轴的经校正旋转量wx'可以通过以下等式(5g)计算。
175.wx
′
=(zc
′‑
za
′
)/lz2
…
等式(5g)
176.动子姿态计算功能402可以如上所述通过考虑y传感器205的读数误差cy和z传感器206的读数误差cz执行校正来计算绕相应轴的旋转量wx'、wy'和wz'作为动子101的姿态信息。
177.另外,利用动子姿态计算功能402,可以如下计算动子101在y方向上的位置y和在z方向上的位置z作为关于动子101的姿态信息。
178.首先,将参考图10描述动子101在y方向上的位置y的计算。在图10中,动子101c所面对的两个y传感器205分别是y传感器205a和205b。另外,y传感器205a和205b的测得的值分别是ya和yb。另外,y传感器205a的位置和y传感器205b的位置的中点被表示为oe'。此外,通过等式(1)至(3)获得的动子101c的位置被表示为os',并且从oe'到os'的距离被表示为dx'。此时,动子101c在y方向上的位置y可以通过利用以下等式(6)的近似计算来计算。
179.y=(ya+yb)/2-wz*dx
′…
等式(6)
180.可以考虑y传感器205a和205b的读数误差cy(205a,101c)和cy(205b,101c)来校正动子101c在y方向上的位置y。考虑到读数误差cy(205a,101c)和cy(205b,101c)而校正的动子101c在y方向上的位置y'可以通过以下等式(6a)近似地计算。
181.y
′
=(ya
′
+yb
′
)/2-wz
′
*dx
′…
等式(6a)
182.接下来,将参考图11a和图11b描述动子101在z方向上的位置z的计算。动子101d所面对的三个z传感器206分别是z传感器206a、206b和206c。另外,z传感器206a、206b和206c的测得的值分别是za zb和zc。另外,z传感器206a的x坐标与z传感器206c的x坐标相同。另外,线性编码器204位于z传感器206a和z传感器206c之间的中间位置。另外,z传感器206a和z传感器206c的位置x被表示为oe”。此外,从oe”到动子101d的中心os”的距离被表示为dx”。此时,动子101d在z方向上的位置z可以通过以下等式(7)的近似计算来计算。
183.z=(za+zb)/2+wy*dx
″…
等式(7)
184.可以考虑z传感器206a、206b和206c的读数误差cz(206a,101d)、cz(206b,101d)和cz(206c,101d)来校正动子101d在z方向上的位置z。考虑到读数误差cz(206a,101d)、cz(206b,101d)和cz(206c,101d)而校正的动子101d在z方向上的位置z'可以通过以下等式(7a)近似计算。
185.z
′
=(za
′
+zb
′
)/2+wy
′
*dx
″…
等式(7a)
186.注意的是,当wz和wy的旋转量都对于位置y和位置z大时,能够以更高的近似准确度执行计算。
187.因此,集成控制器301执行使用动子位置计算功能401和动子姿态计算功能402的处理,以用作用于获取动子101的位置和姿态的获取单元。当获取动子101的位置和姿态时,集成控制器301可以考虑动子101在x方向上的位置的机器差异cx、y传感器205的读数误差cy以及z传感器206的读数误差cz来校正动子101的位置和姿态。
188.接下来,将描述确定用于将期望的力t施加到动子101的要施加到线圈202、207和208的电流值的方法。如上所述,施加到动子101的力t包括作为力的三轴分量的tx、ty和tz以及作为扭矩的三轴分量的twx、twy和twz。使用线圈电流计算功能404执行处理的集成控制器301可以根据下述确定电流值的方法确定要施加到线圈202、207和208的电流值。
189.注意的是,在由线圈202、207和208施加的力分量和扭矩分量当中,从一个力分量或扭矩分量对另一个力分量或扭矩分量造成的影响对于一些情况可以充分忽略。具体而言,由线圈202、207和208施加的力和扭矩被由线圈207施加的x方向上的力、由线圈208施加的y方向上的力和wz方向上的扭矩以及由线圈202施加的z方向上的力、wx方向上的扭矩和wy方向的扭矩形成。由线圈208施加的y方向上的力和wz方向上的扭矩作用于水平方向。由线圈202施加的z方向上的力、wx方向上的扭矩和wy方向上的扭矩作用于悬浮方向。当影响可充分忽略时,可以仅考虑线圈207的x方向上的力、线圈208的y方向上的力和wz方向上的扭矩以及线圈202的z方向上的力、wx方向上的扭矩和wy方向上的扭矩来计算电流值。下面将描述可以充分忽略影响的情况。
190.首先,将参考图12至图14b描述用于将z方向上的力分量tz、wx方向上的扭矩分量twx以及wy方向上的扭矩分量twy施加到动子101的施加到各个线圈202的电流。
191.图12是例示作用在附接到动子101的轭板103上的力与作用在动子101上的力分量tz和扭矩分量twx和twy之间的关系的示意图。
192.在图12中,fzj表示由第j个线圈202施加到轭板103的力。注意的是,j是满足1≤j≤n的整数,其中所安装的线圈202的数量n是大于或等于二的整数。由每个力fzj施加的扭矩对扭矩分量twx和twy有贡献。由每个力fzj施加的扭矩根据力fzj以及作用点与动子101
的中心oc之间的距离确定。
193.图13是示意性地例示z方向上的推力常数曲线601的曲线图。推力常数曲线601示意性地例示了当单位电流被施加到面向轭板103的用于悬浮的线圈202时作用在轭板103上的吸引力。吸引力的量值相对于x方向上的运动持续改变。
194.将参考图14a和图14b描述线圈202的配置的示例。图14a和图14b是例示线圈202的示意图。图14a是从z方向查看时的线圈202的图,而图14b是从x方向查看时的线圈202的图。
195.如图14a和图14b中所示,线圈202具有绕组210和芯211。电流由电流控制器313施加到绕组210。响应于向绕组210施加电流,形成作为磁通路径的磁路212。由于以这种方式形成的磁路212中的磁通量,吸引力在线圈202和轭板103之间起作用。
196.将参考图14a至图15更详细地描述施加到线圈202的电流与在线圈202和轭板103之间起作用的吸引力的量值之间的关系。图15是示意性地例示施加到线圈202的电流与在线圈202和轭板103之间起作用的吸引力的量值之间的关系的曲线图。在图15中所示的曲线图中,水平轴表示施加到线圈202的电流量i,而垂直轴表示作用在线圈202和轭板103之间的吸引力fz的量值。图15中所示的曲线图指示吸引力曲线604,其指示相对于电流量i的吸引力fz的量值。
197.当线圈202和轭板103之间在z方向上的间距恒定时,吸引力fz近似与电流量i的平方成正比。在本文中,在图15中所示的曲线图中,f0表示用于补偿作用在动子101上的重力mg所需的作用在各个线圈202上的力的平均量值。
198.在本文中,数值和符号如下设置。
199.一个线圈202的芯211的底面积:s=0.01[m2]
[0200]
由一个线圈202补偿的动子101的质量的部分:f0=100[n](约10[kg])
[0201]
真空磁导率:μ0=4π
×
10-7
[0202]
气隙:gap[m]
[0203]
线圈202的绕组210的匝数:n[匝]
[0204]
线圈电流:i[a]
[0205]
芯211和轭板103之间的磁通密度:b[t]
[0206]
如果芯211和轭板103的磁导率相对于真空磁导率足够大,那么fz和b可以分别通过以下等式(8a)和(8b)近似计算。
[0207]
fz=s*b2/(2*μ0)
…
等式(8a)
[0208]
b=n*i*μ0/(2*gap)
…
等式(8b)
[0209]
在本文中,当匝数为500[匝]且线圈电流i0为1.0[a]时,气隙“gap”可以通过等式(8a)和等式(8b)被计算为0.006266[m]。
[0210]
在本文中,在吸引力曲线604中,i=i0导致fz=f0的点是q。将描述围绕这个点q的部分。
[0211]
如果“gap”从0.006266[m]沿扩展方向改变0.25[mm],那么有必要在线圈202中生成更大的磁动势(magneto-motive force)以补偿扩展的“gap”。如果“gap”为0.006516[m]并且计算等式(8a)和(8b)以生成相同的fz,那么线圈电流i被计算为1.0399[a]。由于这样的电流值水平,与作为参考的线圈电流i0相比,在动子101的输送期间线圈电流的电流值的变化足够小。
[0212]
因此,在点q附近,在除了电流i0之外施加的电流di与通过施加电流di而在z轴方向上附加生成的力df的量值之间满足以下等式(8c)中表达的关系。注意的是,在原点o附近不满足由等式(8c)表达的关系。
[0213]
df
∝
di
…
等式(8c)
[0214]
在本文中,df与di的比率由以下等式(8d)定义。
[0215]
df/di=ez
…
等式(8d)
[0216]
在图13中所示的推力常数曲线601中,指示ez(j,p)。ez(j,p)具有由等式(8d)指示的比率。即,ez(j,p)表示当动子101处于位置和姿态p时当附加电流di被施加到平均施加到第j个线圈202的电流i0时在z轴方向上附加生成的力df的量值与电流id的比率。
[0217]
根据上述表示参考图12提供描述,其中j是识别线圈202的索引。下面,为了简化说明,z方向上的附加力dfzj被简化表示为fzj,并且附加电流dij被表示为ij。
[0218]
由第j个线圈202在z方向上生成的附加力fzj由以下等式(9a)表达,其中ij表示施加到第j个线圈202的附加电流。
[0219]
fzj=ez(j,p)*ij
…
等式(9a)
[0220]
此外,x(j,p)被定义为当从动子101的原点oc查看时第j个线圈202在x方向上的相对位置,并且y(j,p)被定义为当从动子101的原点oc查看时第j个线圈202在y方向上的相对位置。然后,z方向上的力分量tz、wx方向上的扭矩分量twx、wy方向上的扭矩分量twy分别由以下等式(9b)、(9c)、(9d)表达。
[0221]
tz=σ(ez(j,p)*ij)
…
等式(9b)
[0222]
twx=σ(-ez(j,p)*y(j,p)*ij)
…
等式(9c)
[0223]
twy=σ(ez(j,p)*x(j,p)*ij)
…
等式(9d)
[0224]
如果将满足以上等式(9b)、(9c)和(9d)的电流ij施加到各个线圈202,那么可以获得期望的力分量和扭矩分量(tz,twx,twy)。
[0225]
这里定义了扭矩贡献矩阵m。扭矩贡献矩阵m是指示在动子101处于位置和姿态p时当单位电流施加到第一至第j个线圈202中的每一个时对每个力分量和扭矩分量(tz,twx,twy)的贡献的量值的矩阵。以这种方式,使用扭矩贡献矩阵m,并且与对由施加到各个线圈202的单位电流造成的力分量和扭矩分量(tz,twx,twy)的每个分量的贡献相关的信息被用于确定施加到每个线圈202的电流值。
[0226]
在扭矩贡献矩阵m中,第一行与z方向相关联,第二行与wx方向相关联,并且第三行与wy方向相关联。然后,扭矩贡献矩阵m的第j列的第一行、第j列的第二行和第j列的第三行的相应元素m(1,j)、m(2,j)和m(3,j)分别由以下等式(10a)、(10b)和(10c)表达。扭矩贡献矩阵m是三行n列的矩阵。注意的是,扭矩贡献矩阵m的相应行彼此线性无关。
[0227]
m(1,j)=ez(j,p)
…
等式(10a)
[0228]
m(2,j)=-ez(j,p)*y(j,p)
…
等式(10b)
[0229]
m(3,j)=ez(j,p)*x(j,p)
…
等式(10c)
[0230]
另一方面,用线圈电流向量is引入其元素是要施加到第一至第n线圈202的电流量i1至in的列向量。线圈电流向量is是由以下等式(10d)表达的第一列的第n行的列向量。
[0231]
is=tr(i1,i2,
…
,ij,
…
,in)
…
等式(10d)
[0232]
扭矩向量tq在这里被定义为以下等式(11)。
[0233]
tq=tr(tz,twx,twy)
…
等式(11)
[0234]
然后,从等式(9b)至(9d)、(10a)至(10d)和(11)获得以下等式(12)。
[0235]
tq=m*is
…
等式(12)
[0236]
这里引入了伪电流向量k。伪电流向量k是三行一列的列向量,当tr(m)是扭矩贡献矩阵m的转置矩阵时,它是满足以下等式(13)的向量。
[0237]
tr(m)*k=is
…
等式(13)
[0238]
由于通过将线圈电流向量is定义为由等式(13)表达的向量可以向线圈202施加更大的电流值,该电流值对tz、twx和twy的贡献更大,因此可以高效地施加电流。
[0239]
等式(12)可以通过使用等式(13)变换成以下等式(14)。
[0240]
tq=m*tr(m)*k
…
等式(14)
[0241]
在等式(14)中,m*tr(m)是三行n列矩阵与n行三列矩阵的乘积,因此是三行三列方阵。另外,扭矩贡献矩阵m的相应行彼此线性无关。因此,在任何情况下都可以从m*tr(m)获得逆矩阵。因此,等式(14)可以变换成下面的等式(15)。
[0242]
k=inv(m*tr(m))*tq
…
等式(15)
[0243]
由以下等式(16)表达的线圈电流向量is最终从等式(13)和(15)获得。以这种方式,可以唯一地找到线圈电流向量is。
[0244]
tr(m)*inv(m*tr(m))*tq=is
…
等式(16)
[0245]
通过如上所述计算线圈电流向量is,可以确定要施加到每个线圈202的电流。因而,由于可以将z方向的力分量tz、wx方向上的扭矩分量twx、wy方向上的扭矩分量twy独立地施加到动子101,因此可以使动子101在z方向、wx方向和wy方向上的姿态稳定。
[0246]
接下来,将参考图16和图17描述施加到线圈208以将y方向上的力分量ty和wz方向上的扭矩分量twz施加到动子101的电流。力分量ty和扭矩分量twz分别作用于水平方向。图16是在z方向上从上向下看时动子101的示意图。图17是示意性例示y方向上的吸引力曲线605的曲线图。在图17中所示的曲线图中,水平轴表示施加到线圈208的电流,而垂直轴表示作用在动子101上的力。
[0247]
注意的是,为了简化说明,图16例示了以下情况:其中作为安装在定子201上的线圈208,四个线圈208ar、208br、208al和208bl面向动子101。另外,线圈208al和线圈208ar配对以作为一个线圈208a操作。另外,线圈208bl和线圈208br配对以作为一个线圈208b操作。以这种方式,第j对线圈208jr和线圈208jl配对以作为一个线圈208j操作。
[0248]
图17中所示的吸引力曲线605指示施加到第j对线圈208j的电流il和ir的水平与作用在动子101上的力fy的量值之间的关系。在线圈208和轭板103之间没有排斥力起作用,只有吸引力起作用。因此,当在y+方向上向动子101施加力时,电流在吸引力曲线605的范围605a中被施加到r侧的线圈208jr。另外,当在y-方向上向动子101施加力时,电流在吸引力曲线605的范围605b中被施加到l侧的线圈208jl。
[0249]
例如,当施加在y+方向上的力fa时,电流ia可以施加到r侧的线圈208jr。另外,例如,当施加在y-方向上的力fb时,电流ib可以施加到l侧的线圈208jl。
[0250]
索引j被定义为识别一对线圈208的索引。另外,x(j,p)被定义为当从动子101的原点oc查看时第j对线圈208在x方向上的相对位置。另外,由第j对线圈208在y方向上施加的力被表示为fyj。然后,y方向上的力分量ty和与水平方向对应的wz方向上的扭矩分量twz分
别由以下等式(17a)和(17b)表达。
[0251]
ty=σfyj
…
等式(17a)
[0252]
twz=σ(-fyj*x(j,p))
…
等式(17b)
[0253]
具有由第一至第n线圈208施加的y方向上的力fy1、fy2、...、fyn的元素的y方向力向量fys在这里由以下等式(17c)定义。
[0254]
fys=tr(fy1,fy2,
…
,fyj,
…
,fyn)...等式(17c)
[0255]
此外,扭矩向量tq由以下等式(17d)定义。
[0256]
tq=tr(ty,twz)
…
等式(17d)
[0257]
在扭矩贡献矩阵m中,第一行与y方向相关联,并且第二行与wz方向相关联。然后,扭矩贡献矩阵m的第j列第一行和第j列第二行的相应元素m(1,j)和m(2,j)分别由以下等式(17e)和(17f)表达。
[0258]
m(1,j)=1
…
等式(17e)
[0259]
m(2,j)=x(j,p)
…
等式(17f)
[0260]
为了计算要施加到线圈208的电流,首先,确定满足以下等式(17g)的y方向力向量fys。
[0261]
tq=m*fys
…
等式(17g)
[0262]
由于tq是两行一列的向量,并且m是两行n列的矩阵,因此满足等式(17g)的y方向力向量fys的元素组合有无数种,但是,组合可以根据以下方法唯一地计算。
[0263]
在本文中,引入两行一列的伪电流向量k。伪电流向量k是满足以下等式(17h)的向量,其中tr(m)是扭矩贡献矩阵m的转置矩阵。
[0264]
tr(m)*k=fys
…
等式(17h)
[0265]
等式(17g)可以通过使用等式(17h)变换成以下等式(17i)。
[0266]
tq=m*tr(m)*k
…
等式(17i)
[0267]
项m*tr(m)是两行n列矩阵和n行两列矩阵的乘积,因此是两行两列的方阵。另外,扭矩贡献矩阵m的相应行彼此线性无关。因此,在任何情况下都可以从m*tr(m)获得逆矩阵。因此,等式(17i)可以变换成以下等式(17j)。
[0268]
k=inv(m*tr(m))*tq
…
等式(17j)
[0269]
由以下等式(17k)表达的y方向力向量fys最终从等式(17h)和(17j)获得。因而,可以唯一地计算y方向力向量fys。
[0270]
tr(m)*inv(m*tr(m))*tq=fys
…
等式(17k)
[0271]
在获得y方向力向量fys之后,可以通过从预先计算或测得的吸引力曲线605向后计数来计算要施加到每个线圈208的电流。
[0272]
如上所述,可以确定要施加到每个线圈208的电流。因而,由于y方向上的力分量ty和wz方向上的扭矩分量twz可以独立地施加到动子101,因此动子101的姿态可以在y方向和wz方向上稳定。例如,可以将电流施加到线圈208,使得wz方向上的扭矩始终为0。
[0273]
以这种方式,在本实施例中,动子101在z方向上的移动机器差异和动子101在动子101的y方向上的移动机器差异被校正,从而控制施加到多个线圈202和208的电流。因此,动子101的移动被控制为处于目标姿态(y,z,wx,wy,wz)。因此,能够以更高的准确度控制多个动子101的相应姿态。例如,通过校正动子101在z方向上的移动机器差异并控制施加到多个
线圈202的电流值,动子101的操作被控制以便处于z方向上的目标位置。因此,动子101在悬浮期间的姿态受到控制。因此,能够以更高的准确度控制多个动子101中的每一个在悬浮时的位置。
[0274]
接下来,将描述在作为输送方向的x方向上向动子101施加推力的线圈207的控制方法。根据本实施例的输送系统1是具有感应式线性马达的输送系统。线圈207在线圈207和动子101的导电板107之间生成电磁力,并且向动子101施加x方向上的推力,即,x方向上的力分量tx。导电板107没有特别限制,并且使用电阻相对小的板,例如铝板。
[0275]
当施加电流时,每个线圈207在作为输送方向的x方向上生成移动磁场,以在线圈207和导电板107之间生成电磁力。由此,每个线圈207使动子101在作为输送方向的x方向上生成作为推力的力分量tx。当动子101的速度不足时,可以增加要施加到每个线圈207的电流或改变向每个线圈207施加电流的定时,使得移动磁场移动的速度变得变高。
[0276]
在本实施例中,通过校正动子101的x方向上的移动机器差异,通过控制施加到多个线圈207的电流的电流值和/或定时来控制动子101的移动以实现目标输送速度。因此,能够以更高的准确度控制多个动子101中的每一个的输送速度。
[0277]
如上所述,集成控制器301确定并控制要施加到相应线圈202、207和208的电流的电流指令值。因而,集成控制器301以非接触方式控制定子201上的动子101的输送,同时在六个轴上控制由定子201输送的动子101的姿态。注意的是,集成控制器301作为控制装置的全部或部分功能可以用线圈控制器302以及其它控制装置代替。
[0278]
注意的是,虽然在本实施例中已经描述了以与线圈202和线圈208的电流相同的方式控制线圈207的电流的情况,但是实施例不限于此。例如,在更简单的配置中,可以将感应马达控制器连接到集成控制器301,并且可以通过感应马达控制器来控制每个线圈207的电流,从而生成恒定的移动磁场。
[0279]
如上所述,根据本实施例,可以将六个轴上的力分量和扭矩分量(tx,ty,tz,twx,twy,twz)独立地施加到动子101。因此,根据本实施例,可以在y方向、z方向、wx方向、wy方向、和wz方向上稳定动子101的姿态的同时在x方向上以非接触方式输送动子101。
[0280]
另外,根据本实施例,可以考虑动子101在x方向上的位置的机器差异cx、y传感器205的读数误差cy以及z传感器206的读数误差cz来控制动子101的位置和姿态。因此,可以减少或避免对于多个动子101中的每一个可能存在的机器差异的影响。因此,根据本实施例,在磁悬浮式输送系统1中,能够以更高的准确度输送多个动子101。
[0281]
应当注意的是,虽然已经关于对动子101的x方向上的移动机器差异、y方向上的移动机器差异和z方向上的移动机器差异进行校正的情况进行了以上描述,但可以校正其中的任何一个或两个。
[0282]
第二实施例
[0283]
将参考图18a至图19描述本公开的第二实施例。注意的是,与上述第一实施例中相同的部件用相同的附图标记表示,并且将省略或简化其描述。注意的是,本实施例的移动机器差异的校正可以与第一实施例的移动机器差异的校正结合执行。
[0284]
在本实施例中,当获取用于校正动子101的移动机器差异的校正值时,在线性标尺104的整个区域上获取动子101在x方向上的位置的机器差异。在下文中,将参考图18a和图18b描述在线性标尺104的整个区域上获取动子101在x方向上的位置的机器差异的方法。图
18a和图18b是例示在线性标尺104的整个区域上获取动子101在x方向上的位置的机器差异的方法的示意图,并例示了当获取校正值时共同用于多个动子101的公共测量夹具510。图18a例示了在-x方向上查看时的公共测量夹具510。图18b例示了在-z方向上查看时的公共测量夹具510。
[0285]
公共测量夹具510具有与定子201的线性编码器相似的线性编码器204和作为距离测量手段的激光干涉仪504。线性编码器204附接并安装在公共测量夹具510上以读取在公共测量夹具510中在x方向上滑动的动子101的线性标尺104。激光干涉仪504附接并安装在公共测量夹具510上以检测在公共测量夹具500中在x方向上滑动的动子101在x方向上的位置。
[0286]
公共测量夹具510具有多个z轴辊505。多个z轴辊505沿着x方向布置在两条线或更多条线中。z轴辊505是例如滚珠辊。动子101放置在多条线的z轴辊505上。z轴辊505可以在x方向上滑动所放置的动子101。公共测量夹具510可以设置有y轴辊(未示出),用于当动子101在x方向上滑动时在y方向上调节动子101。
[0287]
在公共测量夹具510中,通过由线性编码器204读取动子101的线性标尺104,可以检测在公共测量夹具510中在x方向上滑动的动子101在x方向上的位置。也可以通过激光干涉仪504的测量来检测在公共测量夹具500中在x方向上滑动的动子101在x方向上的位置。
[0288]
图19是示出当动子101通过在多个z轴辊505上滑动而在x方向上移动时激光干涉仪504的测得的值与线性编码器204的测得的值之间的差异作为err的曲线图。注意的是,当用激光干涉仪504测量时,例如可以执行在x方向上以1mm为增量的测量以便减少校正数据的量。当测得的数据被用作校正值时,可以通过使用诸如拉格朗日插值之类的方法从多个测量点对测量点之间的数据进行插值。
[0289]
动子101在x方向上的位置的机器差异cx'可以通过以下等式(x1)'计算。
[0290]
cx
′
=(ref_lx
′‑
lx
′
)-(ref_ex
′‑
ex
′
)
…
等式(x1)'
[0291]
这里,ex'、lx'、ref_lx'和ref_ex'分别表示以下内容。
[0292]
ex':附接到公共测量夹具510的线性编码器204的测得的值
[0293]
lx':激光干涉仪504的测得的值
[0294]
ref_lx':从激光干涉仪504到动子101的x方向上的位置的设计值
[0295]
ref_ex':线性编码器204的附接位置的设计值。
[0296]
基于当动子101被z轴辊505滑动并在x方向上移动时获得的测量结果,可以在线性标尺104的整个区域上获取机器差异cx'。注意的是,机器差异cx'不一定必须在线性标尺104的整个区域中获取,而是可以在线性标尺104的一部分中获取。
[0297]
由集成控制器301将x方向上的机器差异cx'作为x方向上的机器差异信息520与注册在rfid标签512中的动子101的个体id相关联地存储。在计算动子101在x方向上的位置x时,考虑与动子101的个体id相关联的机器差异cx'。
[0298]
在动子位置计算功能401中,当考虑作为动子101b在x方向上的位置的机器差异cx'的机器差异cx(101b)'时,可以通过以下等式(1c)'代替等式(1c)来计算动子101b的位置pos(101b)'。机器差异cx(101b)'可以是在线性标尺104的整个区域上获取的值当中与由线性编码器204c读取的线性标尺104的位置对应的值。
[0299]
pos(101b)
′
=sc
–
pc-wz*d+cx(101b)
′…
等式(1c)'
[0300]
通过考虑到机器差异cx'而使用等式(1c)'进行计算,可以获取更准确的动子101b的位置。
[0301]
因此,在本实施例中,当在动子位置计算功能401中计算动子101在x方向上的位置x时,考虑在线性标尺104的整个区域上获取的动子101在x方向上的位置的机器差异cx'。机器差异cx'与在动子101的rfid标签512中注册的个体id相关联。这使得可以校正个体动子101的机器差异。因此,在本实施例中,无论动子101的位置如何,都可以获取更准确的当前位置。
[0302]
基于如上所述获得的动子101的位置,集成控制器301可以通过维持恒定速度、减速或加速速度来控制动子101的输送速度。
[0303]
在本实施例中,由于无论动子101的位置如何都可以获取更准确的当前位置,因此当动子101以目标输送速度被输送时,可以使动子101更准确地跟随目标输送速度。因此,可以将作为相对于动子101的目标输送速度的速度不均性的速度波动抑制得小。因此,根据本实施例,在磁悬浮式输送系统1中,能够以更高的准确度输送多个动子101。
[0304]
第三实施例
[0305]
将参考图5a、图5b和图20描述本公开的第三实施例。注意的是,与上述第一实施例和第二实施例中的部件相同的部件用相同的附图标记标示,并且将省略或简化其描述。
[0306]
在本实施例中,将描述使用动子101的固有频率的机器差异信息来控制动子101的位置和姿态的方法。注意的是,本实施例的移动机器差异的校正可以与第一实施例或第二实施例的移动机器差异的校正结合执行。
[0307]
首先,测量每个动子101的固有频率。在固有频率的测量中,如图5a和图5b中所示,用于测量固有频率的动子101被支撑在贝塞尔点501处。在如此支撑动子101的情况下,加速度传感器(未示出)被附接到动子101以使用例如锤击来执行冲击激励,并且动子101的固有频率根据那时加速度传感器的测量结果来测量。
[0308]
接下来,根据测得的动子101的固有频率来确定用于移除固有频率的滤波器的系数。作为用于移除固有频率的滤波器,例如可以使用诸如陷波滤波器之类的具有窄阻带的带阻滤波器。
[0309]
固有频率的机器差异作为固有频率的机器差异信息522(参见图20)与注册在rfid标签512中的动子101的个体id通过集成控制器301相关联地存储在存储设备中。固有频率的机器差异可以存储在集成控制器301可以参考的外部存储设备中。
[0310]
将参考图20详细描述使用如上所述测得的固有频率的机器差异信息的操作校正。图20是例示在使用固有频率的机器差异信息来校正操作的情况下控制动子101的位置和姿势的控制块的示例的示意图。
[0311]
在图20中,符号p表示具有(x,y,z,wx,wy,wz)作为分量的动子101的位置和姿态,符号ref表示(x,y,z,wx,wy,wz)的目标值,并且符号err表示目标值ref与位置和姿态p之间的偏差。
[0312]
类似于图8中所示的情况,动子姿态控制功能403基于偏差err的量值、偏差err的改变、偏差err的累积值等计算要施加到动子101以实现目标值ref的力t。在本实施例中,集成控制器301使用滤波器功能514执行处理。滤波器功能514将用于移除固有频率的滤波器应用于力t以计算经滤波的力t'。当应用用于移除固有频率的滤波器时,集成控制器301根
据与注册在动子101的rfid标签512中的个体id相关联地存储的固有频率的机器差异信息522通过滤波器功能514确定用于移除固有频率的滤波器的滤波器系数。
[0313]
线圈电流计算功能404计算要施加到线圈202、207和208的线圈电流i,以便基于经滤波的力t'以及位置和姿态p将经滤波的力t'施加到动子101。当如此计算的线圈电流i施加到线圈202、207和208时,经滤波的力t'作用于动子101以将位置和姿态p改变为目标值ref。
[0314]
通过以这种方式配置控制块,可以通过使用动子101的固有频率的机器差异信息将动子101的位置和姿态p控制到期望的目标值ref。
[0315]
在本实施例中,如上所述,在滤波器功能514中,将用于移除固有频率的滤波器应用于要施加到动子101的力t以计算经滤波的力t'。根据与注册在动子101的rfid标签512中的个体id相关联地存储的固有频率的机器差异信息来确定用于移除固有频率的滤波器的滤波器系数。因此,可以控制个体动子101的位置和姿态。因此,根据本实施例,能够以高准确度传送多个动子101。
[0316]
第四实施例
[0317]
将参考图21a和图21b描述本公开的第四实施例。注意的是,与上述第一实施例至第三实施例中的部件相同的部件用相同的附图标记标示,并且将省略或简化其描述。
[0318]
在本实施例中,将参考图21a和图21b描述测量动子101的重量的情况。图21a和图21b是例示测量动子101的重量的方法的示意图。图21a例示了在-x方向上查看的公共测量夹具500。图21b例示了在-z方向上查看的公共测量夹具500。
[0319]
当测量动子101的重量时,动子101以与第一实施例相同的方式在公共测量夹具500中通过动子101的贝塞尔点501支撑。在本实施例中,用于测量动子101的重量的重量传感器511安装在公共测量夹具500的用于支撑动子101的支撑部分上。
[0320]
对于多个动子101中的每一个,动子101安装在公共测量夹具500中,并且重量可以由重量传感器511测量。重量传感器511没有特别限制,只要它可以测量动子101的重量即可,但可以使用载荷传感器(load cell)等。
[0321]
当制造多个动子101时,由于部件的制造误差或组装误差,可能发生多个动子101的重量的变化。从以高准确度输送多个动子101的观点来看,优选的是多个动子101具有小的重量变化或没有重量变化。
[0322]
为了校正动子101的重量的变化,首先,如上所述通过重量传感器511测量多个动子101中的每一个的重量。然后,基于重量的测量结果,通过例如在多个动子101的部分或全部上安装重物的方法、改变部件的方法等来调整多个动子101的重量以使得多个动子101的重量相同。因此,可以减少或消除多个动子101的重量的变化。通过以这种方式校正重量的变化,能够以高准确度输送多个动子101。
[0323]
即使当多个动子101具有重量变化时,通过如上述第一实施例至第三实施例中那样校正动子101的机器差异,也能够以高准确度输送多个动子101。
[0324]
修改实施例
[0325]
本公开不限于上述实施例,并且各种修改是可以的。
[0326]
例如,虽然在以上述实施例中已经作为示例描述了在x方向、y方向、z方向、wx方向、wy方向和wz方向上控制动子101的位置和姿态的情况,但是实施例不限于此。可以在x方
向、y方向、z方向、wx方向、wy方向或wz方向中的至少任一方向上获取位移以控制位置和姿态。
[0327]
另外,虽然在上述实施例中已经描述了使动子101漂浮并以非接触方式输送动子101的磁浮式输送系统1,但是实施例不限于此。例如,当动子101的质量或放置在动子101上的工件102的质量大并且在垂直方向上施加的悬浮力大时,流体(诸如空气)的静压力可以被分开用于悬浮以辅助悬浮力。输送系统1还可以被配置为用于通过利用流体的静压力等而不是电磁力作为悬浮力来使动子101悬浮的悬浮式输送系统。
[0328]
另外,虽然在上述实施例中已经作为示例描述了布置预定条数的多个线圈202、207或208的情况,但是实施例不限于此。每个线圈的预定条数可以根据布置在动子101中的轭板103、导电板107来布置。
[0329]
另外,虽然在上述实施例中已经作为示例描述了动子101设置有轭板103和导电板107的情况,但是实施例不限于此。动子101可以具有包括多个永磁体的磁体组,而不是轭板103和导电板107。磁体组可以包括例如沿着x方向布置的多个永磁体。
[0330]
另外,根据本公开的输送系统可以用作将工件连同动子一起输送到对工件执行各个操作处理的各个处理装置(诸如机床)的操作区域的输送系统,工件是制造诸如电子设备之类的物品的制造系统中的物品。执行操作处理的处理装置可以是任何装置,诸如执行部件到工件的组装的装置、执行涂漆的装置等。另外,要制造的物品不限于特定物品并且可以是任何部件。
[0331]
如上所述,根据本公开的输送系统可以被用于将工件输送到操作区域,在操作区域中对输送的工件执行操作处理,并制造物品。另外,根据本公开的输送系统要输送的输送对象可以不是工件。例如,除工件以外的物品、诸如人或动物之类的活体可以是输送对象。
[0332]
根据本公开,能够在悬浮式输送系统中以更高的准确度输送多个动子。
[0333]
其它实施例
[0334]
本公开的(一个或多个)实施例还可以通过读出并执行记录在存储介质(其也可以被更完整地称为“非暂态计算机可读存储介质”)上的计算机可执行指令(例如,一个或多个程序)以执行上述(一个或多个)实施例中的一个或多个实施例的功能和/或包括用于执行上述(一个或多个)实施例中的一个或多个实施例的功能的一个或多个电路(例如,专用集成电路(asic))的系统或装置的计算机来实现,以及通过由系统或装置的计算机通过例如从存储介质读出并执行计算机可执行指令以执行上述(一个或多个)实施例中的一个或多个实施例的功能和/或控制一个或多个电路执行上述(一个或多个)实施例中的一个或多个实施例的功能而执行的方法来实现。计算机可以包括一个或多个处理器(例如,中央处理单元(cpu)、微处理单元(mpu)),并且可以包括单独计算机或单独处理器的网络,以读出并执行计算机可执行指令。计算机可执行指令可以例如从网络或存储介质提供给计算机。存储介质可以包括例如硬盘、随机存取存储器(ram)、只读存储器(rom)、分布式计算系统的存储装置、光盘(诸如紧凑盘(cd)、数字多功能盘(dvd)或蓝光盘(bd)
tm
)、闪存设备、存储卡等中的一个或多个。
[0335]
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
[0336]
虽然已经参考示例性实施例描述了本公开,但是应该理解的是,本公开不限于所公开的示例性实施例。所附权利要求的范围应被赋予最广泛的解释,以涵盖所有这些修改以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1