用于控制超级电容器充电电压以延长超级电容器寿命的系统和方法与流程
用于控制超级电容器充电电压以延长超级电容器寿命的系统和方法
1.相关申请的交叉引用
2.本技术要求2021年2月1日提交的标题为“用于控制超级电容器充电电压以延长超级电容器寿命的系统和方法”的第63/144,446号美国临时申请的权益和优先权,所述申请的全部公开内容特此以引用的方式并入本文中。
背景技术:
3.本公开总体上涉及超级电容器的领域,且更具体地说,涉及用于延长超级电容器的寿命的系统和方法。
4.与普通电容器不同,超级电容器不使用常规的固体电介质,而是使用静电双层电容和电化学赝电容,这两种电容器构成了电容器的总电容。确切地说,静电双层电容器(“edlc”)使用的碳电极或衍生物的静电双层电容比电化学赝电容高得多。edlc中的电荷分离是通过使用亥姆霍兹双层(helmholtz double layer)实现的。电荷分离约为几埃(0.3-0.8nm),比常规电容器小得多。通过更小的电荷分离,超级电容器能够比常规电容器具有更大的电容。
5.超级电容器可用于整个楼宇管理系统(“bms”)。bms一般是一种配置成控制、监测和管理楼宇或楼宇区域之中或周围的设备的装置系统。bms可包含供暖、通风和空调(“hvac”)系统、安防系统、照明系统、火灾报警系统、另一个能够管理楼宇功能或装置的系统,或其任何组合。bms装置可以安装在任何环境中(例如,室内区域或室外区域),环境可包含任何数目个楼宇、空间、分区、房间或区域。bms可包含各种装置(例如,hvac装置、控制器、冷却器、风扇、传感器等),这些装置的配置有助于监测和控制楼宇空间。超级电容器可包含在bms装置内。
6.当前,许多楼宇管理系统提供对整个设施、楼宇或其它环境的控制。例如,楼宇管理系统可配置成监测多栋楼宇,每栋楼宇都有hvac系统、水系统、灯光、空气质量、安防和/或楼宇管理系统权限内的设施的任何其它方面。
7.超级电容器在使用期间可能会老化。老化可导致电容减小和内部电阻增大。老化可能会因为暴露于高温和高运行电压而加快。因此,尽管超级电容器仍然可以运行,但其性能可能会显著降低(例如,随着超级电容器的老化,它能够存储的能量将减少)。一些系统在其额定电压下运行超级电容器,这会增加所存储的能量,但可能会缩短超级电容器的运行寿命。其它系统在低于额定电压的电压下运行超级电容器,这可延长超级电容器的寿命,但是会导致能量存储减少。因此,能量存储和超级电容器寿命之间存在权衡。
技术实现要素:
8.本公开的一个实施方案是一种确定故障安全装置中的电容器寿命的方法。所述方法包含:测量将所述故障安全装置返回故障安全位置所需要的能量大小,测量所述电容器的有效电容,比较所述能量大小与所述有效电容以确定所述电容器的寿命参数。
9.在一些实施例中,所述方法进一步包含基于所述有效电容确定所述电容器的充电电压,并使用所述充电电压对所述电容器充电。在一些实施例中,所述寿命参数是与所述电容器的剩余运行周期相关联的时间长度。在一些实施例中,所述故障安全装置是致动器。在一些实施例中,所述寿命参数是将所述电容器充电到与使所述故障安全装置返回到所述故障安全位置所需要的所述能量大小相关联的电平所需要的时间量。在一些实施例中,所述寿命参数是与物理地测试所述电容器将所述故障安全装置返回到所述故障安全位置的能力相关联的诊断信息。在一些实施例中,所述方法进一步包含将所述寿命参数发送到楼宇管理系统(bms),且所述寿命参数指示所述电容器应该更换。
10.本公开的另一实施方案是一种对故障安全装置中的电容器充电的方法。所述方法包含:测量将所述故障安全装置返回到故障安全位置所需要的能量大小,测量所述电容器的有效电容,基于所述有效电容和所述能量大小而确定所述电容器的充电电压,以及使用所述充电电压对所述电容器充电。
11.在一些实施例中,所述故障安全装置是致动器。在一些实施例中,所述方法进一步包含比较所述能量大小与所述有效电容以确定所述电容器的寿命参数,并发送所述寿命参数。在一些实施例中,所述寿命参数指示所述电容器应该更换。在一些实施例中,所述寿命参数是与所述电容器的剩余运行周期相关联的时间长度。在一些实施例中,所述寿命参数是将所述电容器充电到与使所述故障安全装置返回到所述故障安全位置所需要的所述能量大小相关联的电平所需要的时间量。在一些实施例中,所述寿命参数是与物理地测试所述电容器将所述故障安全装置返回到所述故障安全位置的能力相关联的诊断信息。
12.本公开的另一实施方案是一种故障安全装置组合件,其包含致动器、电容器,及包含处理器和存储器的处理电路。所述存储器包含存储于其上的指令,所述指令在由所述处理器执行时使所述处理电路:测量将所述致动器返回到故障安全位置所需要的能量大小,测量所述电容器的有效电容,比较所述能量大小与所述有效电容以确定所述致动器的运行参数,以及根据所述运行参数运行所述致动器。
13.在一些实施例中,所述存储器上存储有其它指令,所述其它指令在由所述处理器执行时使所述处理电路:基于所述有效电容确定所述电容器的充电电压,并使用所述充电电压对所述电容器充电。
14.在一些实施例中,测量所述有效电容包含将所述电容器充电至满电,测量所述电容器的第一电压,通过已知负载对所述电容器放电,测量与所述放电相关联的电流,并测量所述电容器的第二电压。在一些实施例中,测量将所述致动器返回到所述故障安全位置所需要的所述能量大小包含将所述致动器从第一位置驱动到第二位置,并测量与将所述致动器从所述第一位置驱动到所述第二位置相关联的能量大小。在一些实施例中,所述致动器的移动范围大于所述第一位置和所述第二位置之间的移动范围。在一些实施例中,指示用信号表示所述电容器应该更换。
15.本公开的另一实施方案是一种确定故障安全装置中的电容器的寿命参数的方法,包含:测量将所述故障安全装置返回到故障安全位置所需要的能量大小,测量所述电容器的有效电容,比较所述能量大小与所述有效电容以确定所述电容器的所述寿命参数,以及发送所述电容器的所述寿命参数。
16.在一些实施例中,所述方法进一步包含基于所述有效电容确定所述电容器的充电
电压,并使用所述充电电压对所述电容器充电。在一些实施例中,所述寿命参数是与所述电容器的剩余运行周期相关联的时间长度。在一些实施例中,所述故障安全装置是致动器。在一些实施例中,所述寿命参数是将所述电容器充电到与使所述故障安全装置返回到所述故障安全位置所需要的所述能量大小相关联的电平所需要的时间量。在一些实施例中,所述寿命参数是与物理地测试所述电容器将所述故障安全装置返回到所述故障安全位置的能力相关联的诊断信息。在一些实施例中,指示用信号表示所述电容器应该更换。
17.本公开的另一实施方案是一种对故障安全装置中的电容器充电的方法,包含:测量将所述故障安全装置返回到故障安全位置所需要的能量大小,测量所述电容器的有效电容,基于所述有效电容和所述能量大小而确定所述电容器的充电电压,以及使用所述充电电压对所述电容器充电。
18.在一些实施例中,所述故障安全装置是致动器。在一些实施例中,所述方法进一步包含比较所述能量大小与所述有效电容以确定所述电容器的寿命参数,并发送所述寿命参数的指示。在一些实施例中,所述指示用信号表示所述电容器应该更换。在一些实施例中,所述指示是与所述电容器的剩余运行周期相关联的时间长度。在一些实施例中,所述指示是将所述电容器充电到与使所述故障安全装置返回到所述故障安全位置所需要的所述能量大小相关联的电平所需要的时间量。在一些实施例中,所述指示是与物理地测试所述电容器将所述故障安全装置返回到所述故障安全位置的能力相关联的诊断信息。
19.本公开的另一实施方案是一种故障安全装置组合件,其包含致动器、电容器,及包含处理器和存储器的处理电路,所述存储器上存储有指令,所述指令在由所述处理器执行时使所述处理电路:测量将所述致动器返回到故障安全位置所需要的能量大小,测量所述电容器的有效电容,比较所述能量大小与所述有效电容以确定所述致动器的运行参数,以及根据所述运行参数运行所述致动器。
20.在一些实施例中,所述存储器上存储有其它指令,所述其它指令在由所述处理器执行时使所述处理电路:基于所述有效电容确定所述电容器的充电电压,并使用所述充电电压对所述电容器充电。在一些实施例中,所述运行参数描述所述致动器返回到所述故障安全位置的速度。在一些实施例中,确定所述致动器的所述运行参数进一步包含从用户接收所述速度的选择。在一些实施例中,所述存储器进一步包含存储于其上的指令,所述指令在由所述处理器执行时使所述处理电路:比较所述能量大小与所述有效电容以确定所述致动器的寿命参数,并发送所述寿命参数。在一些实施例中,所述寿命参数指示所述电容器应该更换。在一些实施例中,所述故障安全装置组合件进一步包含人工智能模块。
附图说明
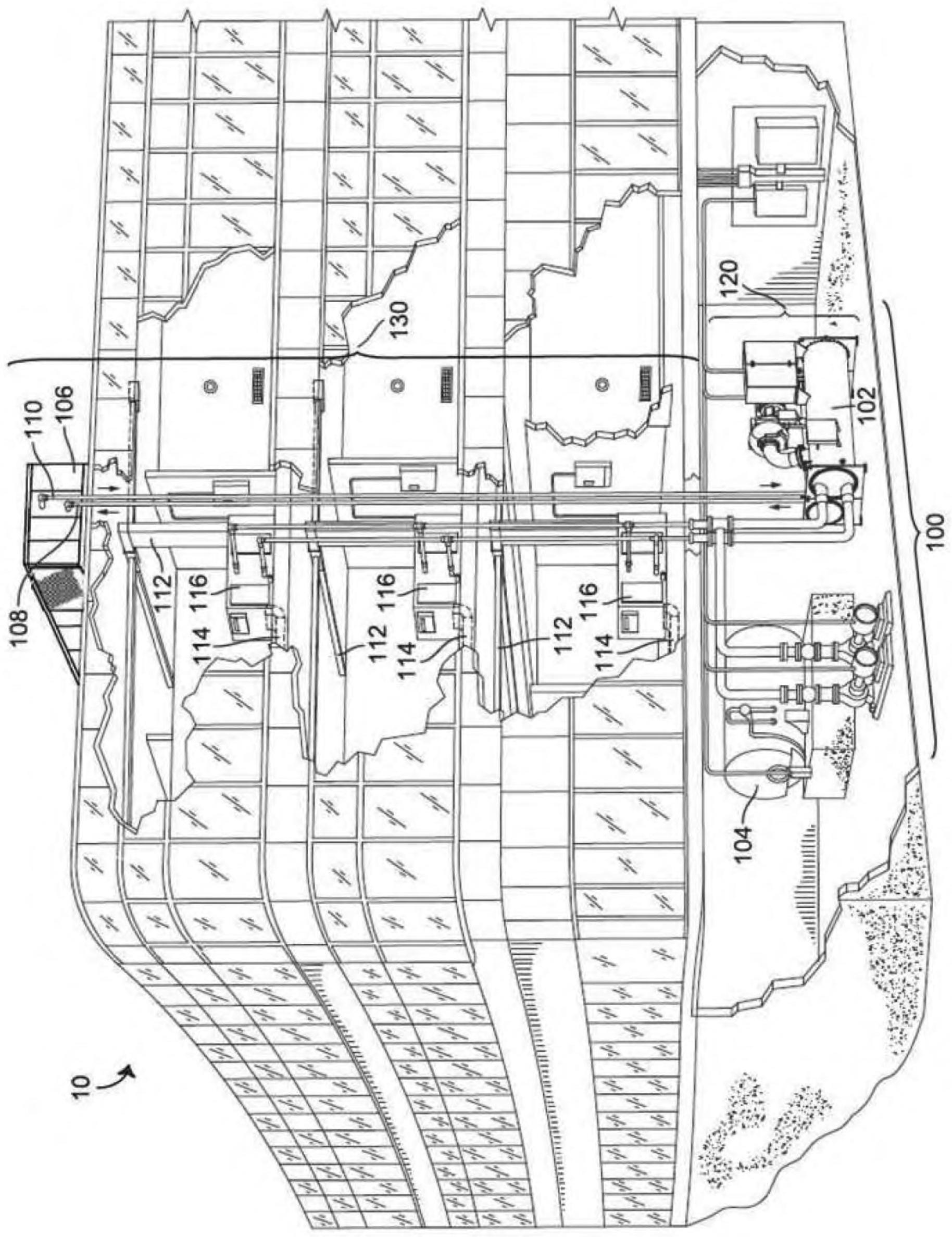
21.图1是根据一些实施例的配备有hvac系统的楼宇的图。
22.图2是根据一些实施例的可用于服务图1的楼宇的水边系统的框图。
23.图3是根据一些实施例的可用于服务图1的楼宇的空边系统的框图。
24.图4是根据一些实施例的可用于监测和控制图1的楼宇的楼宇管理系统(bms)的框图。
25.图5是根据一些实施例的包含具有可调整充电电压的超级电容器的致动器的框图。
26.图6是根据一些实施例的用于控制超级电容器的充电电压的过程的流程图。
27.图7是根据一些实施例的用于确定对应于致动器操作的能量值的过程的流程图。
28.图8是根据一些实施例的用于确定与故障安全装置相关联的参数的过程的流程图。
29.图9a是根据一些实施例的用于确定电容器寿命的过程的流程图。
30.图9b是根据一些实施例的用于确定驱动故障安全装置的速度的过程的流程图。
31.图10是根据一些实施例的用于确定对电容器充电所需要的时间的过程的流程图。
32.图11是根据一些实施例的用于对超级电容器充电的升压-降压转换器的图。
具体实施方式
33.概述
34.超级电容器通常用于需要许多快速充电/放电循环的应用,而不是长期紧凑的能量存储。例如,超级电容器可用于汽车、公共汽车、火车、起重机和电梯,用来再生制动、短期能量存储或突发模式电力输送。
35.如上文所指出,超级电容器通常具有“额定电压”。额定电压对应于应该用于对超级电容器充电的最大电压电平。通常,额定电压可包含一个安全裕度,以防电解质意外分解。
36.如上文所描述,一些系统在其额定电压下运行超级电容器,这会增加所存储的能量,但可能会缩短超级电容器的运行寿命。其它系统在低于额定电压的电压下运行超级电容器,这可延长超级电容器的寿命,但是会导致能量存储减少。因此,能量存储和超级电容器寿命之间存在权衡。
37.本公开是针对测量和延长电容器的寿命,以及基于电容器的测得寿命来控制故障安全装置的操作。在一些实施例中,本公开包含用于确定和实施所需最小运行电压(例如,在装置中产生预定输出所需要的电压)的系统和方法。
38.作为一个实例,可以确定和实施对应于故障安全返回的正确操作(即,断电时,致动器返回默认位置)的所需最小运行电压。在一些实施例中,超级电容器的电容可在装置(例如,致动器)通电之后由控制器在初始充电状态下测量。基于电容测量,控制器可以配置适当的运行电压(即,充电电压)。因此,超级电容器可配置成在其生命周期开始时充电至较低电压(这可减少老化),并在生命周期后期充电至较高电压(这可抵消电容减少)。
39.在一些实施例中,本公开包含用于基于电容器的测得特征来控制故障安全装置的操作的系统和方法。作为一个实例,控制器可确定运行故障安全装置(例如,将故障安全装置返回到故障安全位置)所需要的能量。基于能量确定,控制器可以确定相关联电容器(例如,故障安全电容器)的寿命。因此,故障安全装置(例如,致动器等)可配置成以更慢的速度运行(这可抵消电容减少)。另外或替代地,控制器可收集与故障安全装置相关联的诊断,确定装置(或其组件)何时需要更换和/或发送装置寿命的指示。
40.楼宇hvac系统和楼宇管理系统
41.现在参考图1-4,根据一些实施例,示出了其中可以实施本公开的系统和方法的若干楼宇管理系统(bms)和hvac系统。简单来说,图1示出配备有hvac系统100的楼宇10。图2是可用于服务楼宇10的水边系统200的框图。图3是可用于服务楼宇10的空边系统300的框图。
图4是可用于监测和控制楼宇10的bms的框图。
42.楼宇和hvac系统
43.特别参考图1,示出了楼宇10的透视图。楼宇10由bms服务。bms一般是一种配置成控制、监测和管理楼宇或楼宇区域之中或周围的设备的装置系统。bms可包含例如hvac系统、安防系统、照明系统、火灾报警系统、任何其它能够管理楼宇功能或装置的系统,或其任何组合。
44.服务楼宇10的bms包含hvac系统100。hvac系统100可包含多个hvac装置(例如,加热器、制冷机、空气处理单元、泵、风扇、热能存储装置等),它们配置成为楼宇10提供供暖、制冷、通风或其它服务。例如,hvac系统100示出为包含水边系统120和空边系统130。水边系统120可向空边系统130的空气处理单元提供加热或冷却流体。空边系统130可以使用加热或冷却流体来加热或冷却提供给楼宇10的气流。可用于hvac系统100的示例性水边系统和空边系统参考图2-3更详细地描述。
45.hvac系统100示出为包含制冷机102、锅炉104和屋顶空气处理单元(ahu)106。水边系统120可使用锅炉104和制冷机102来加热或冷却工作流体(例如,水、乙二醇等),并且可以使工作流体循环到ahu 106。在各种实施例中,水边系统120的hvac装置可位于楼宇10之中或周围(如图1中所示),或位于诸如集中设备(例如,制冷设备、蒸汽设备、加热设备等)的非现场位置。工作流体可在锅炉104中加热或在制冷机102中冷却,这取决于楼宇10中是需要供暖还是制冷。锅炉104可例如通过燃烧可燃材料(例如,天然气)或使用电加热元件来向循环流体添加热量。制冷机102可使循环流体与热交换器(例如,蒸发器)中的另一流体(例如,制冷剂)成热交换关系以从循环流体吸收热量。来自制冷机102和/或锅炉104的工作流体可经由管道108输送到ahu106。
46.ahu 106可使工作流体与通过ahu 106的气流成热交换关系(例如,经由冷却盘管和/或加热盘管的一个或多个级来进行)。例如,气流可以是外部空气、楼宇10内部的回风,或这两者的组合。ahu 106可在气流和工作流体之间传送热量,以便提供气流加热或冷却。例如,ahu 106可包含配置成使气流通过或穿过包含工作流体的热交换器的一个或多个风扇或鼓风机。接着,工作流体可以经由管道110返回到制冷机102或锅炉104。
47.空边系统130可经由送风管112将ahu 106所供应的气流(即,送风气流)输送到楼宇10,并且可经由回风管114将楼宇10的回风提供到ahu 106。在一些实施例中,空边系统130包含多个变风量(vav)单元116。例如,空边系统130示出为在楼宇10的每一楼层或分区包含单独的vav单元116。vav单元116可包含风门或其它流控制元件,它们可用于控制提供给楼宇10的各个分区的送风气流量。在其它实施例中,空边系统130(例如,经由送风管112)将送风气流输送到楼宇10的一个或多个分区中而不使用中间vav单元116或其它流控制元件。ahu 106可包含配置成测量送风气流的属性的各种传感器(例如,温度传感器、压力传感器等)。ahu 106可从位于ahu 106内和/或楼宇分区内的传感器接收输入,并且可以通过ahu 106调整流速、温度或送风气流的其它属性,以达到楼宇分区的设定点条件。
48.水边系统
49.现在参考图2,根据一些实施例,示出了水边系统200的框图。在各种实施例中,水边系统200可以用来补充或替换hvac系统100中的水边系统120,或者可以与hvac系统100分开实施。在hvac系统100中实施时,水边系统200可包含hvac系统100中的hvac装置子集(例
如,锅炉104、制冷机102、泵、阀等),并且可用于向ahu 106供应加热或冷却流体。水边系统200的hvac装置可位于楼宇10内(例如,作为水边系统120的组件),或位于诸如集中设备的非现场位置。
50.在图2中,水边系统200示出为具有多个分设备202-212的集中设备。分设备202-212示出为包含加热器分设备202、热回收制冷机分设备204、制冷机分设备206、冷却塔分设备208、高温热能存储(tes)分设备210和低温热能存储(tes)分设备212分设备202-212消耗来自公用事业公司的资源(如水、天然气、电等),以满足楼宇或园区的热能负荷(如热水、冷水、供暖、制冷等)。例如,加热器分设备202可配置成在热水环路214中加热水,所述热水环路使热水在加热器分设备202和楼宇10之间循环。制冷机分设备206可配置成在冷水环路216中冷却水,所述冷水环路使冷水在制冷机分设备206和楼宇10之间循环。热回收制冷机分设备204可配置成将热量从冷水环路216传送到热水环路214,以便为热水提供额外的加热,以及为冷水提供额外的冷却。冷凝器水环路218可在制冷机分设备206中从冷水吸收热量,并在冷却塔分设备208中排出所吸收的热量或将吸收的热量传送到热水环路214。高温tes分设备210和低温tes分设备212可以分别存储高温热能和低温热能,以供后续使用。
51.热水环路214和冷水环路216可将加热和/或冷却水输送到位于楼宇10的屋顶上的空气处理器(例如,ahu 106)或楼宇10的各个楼层或分区(例如,vav单元116)。空气处理器将空气推过热交换器(例如,加热盘管或冷却盘管),水通过热交换器为空气提供加热或冷却。空气可被输送到楼宇10的各个分区以服务于楼宇10的热能负荷。然后,水返回到分设备202-212以进行进一步加热或冷却。
52.尽管分设备202-212示出和描述为加热和冷却水以循环到楼宇,但是应理解,作为水的替代或补充,可以使用任何其它类型的工作流体(例如,乙二醇、co2等)来服务于热能负荷。在其它实施例中,分设备202-212可直接向楼宇或园区提供加热和/或冷却,而不需要中间传热流体。水边系统200的这些和其它变化形式在本公开的教示内容内。
53.分设备202-212中的每一个可包含配置成促进分设备的功能的各种设备。例如,加热器分设备202示出为包含多个配置成在热水环路214中向热水添加热量的加热元件220(例如,锅炉、电加热器等)。加热器分设备202还示出为包含若干个配置成在热水环路214中循环热水并控制热水通过各个加热元件220的流速的泵222和224。制冷机分设备206示出为包含多个配置成在冷水环路216中从冷水中去除热量的冷却器232。制冷机分设备206还示出为包含若干个配置成在冷水环路216中循环冷水并控制冷水通过各个制冷机232的流速的泵234和236。
54.热回收制冷机分设备204示出为包含多个配置成将热量从冷水环路216传送到热水环路214的热回收热交换器226(例如,制冷电路)。热回收制冷机分设备204还示出为包含若干个配置成使热水和/或冷水循环通过热回收热交换器226并控制水通过各个热回收热交换器226的流速的泵228和230。冷却塔分设备208示出为包含多个配置成在冷凝器水环路218中从冷凝器水中去除热量的冷却塔238。冷却塔分设备208还示出为包含若干个配置成在冷凝器水环路218中循环冷凝器水并控制冷凝器水通过各个冷却塔238的流速的泵240。
55.高温tes分设备210示出为包含配置成存储热水以供后续使用的高温tes罐242。高温tes分设备210还可包含一个或多个配置成控制热水进入或离开高温tes罐242的流速的泵或阀。低温tes分设备212示出为包含配置成存储冷水以供后续使用的低温tes罐244。低
温tes分设备212还可包含一个或多个配置成控制冷水进入或离开低温tes罐244的流速的泵或阀。
56.在一些实施例中,水边系统200中的泵(例如,泵222、224、228、230、234、236和/或240)或水边系统200中的管道中的一个或多个包含与其相关联的隔离阀。隔离阀可与泵集成,或定位在泵的上游或下游,以控制水边系统200中的流体流。在各种实施例中,基于水边系统200的特定配置和水边系统200所服务的负荷类型,水边系统200可包含更多的、更少的或不同类型的装置和/或分设备。
57.空边系统
58.现在参考图3,根据一些实施例,示出了空边系统300的框图。在各种实施例中,空边系统300可以用来补充或替换hvac系统100中的空边系统130,或者可以与hvac系统100分开实施。在hvac系统100中实施时,空边系统300可包含hvac系统100中的hvac装置子集(例如,ahu 106、vav单元116、管112-114、风扇、风门等),并且可位于楼宇10之中或周围。空边系统300可用于使用水边系统200所提供的加热或冷却流体来加热或冷却提供给楼宇10的气流。
59.在图3中,空边系统300示出为包含节能器型空气处理单元(ahu)302。节能器型ahu改变供空气处理单元用于加热或冷却的外部空气量和回风量。例如,ahu 302可经由回风管308从楼宇分区306接收回风304,并且可经由送风管312将送风310输送到楼宇分区306。在一些实施例中,ahu 302是位于楼宇10屋顶上的屋顶单元(例如,图1中所示的ahu 106),或以其它方式定位成接收回风304和外部空气314。ahu302可配置成运行排风风门316、混合风门318和外部空气风门320,以控制组合形成送风310的外部空气314和回风304的量。任何不通过混合风门318的回风304可作为排风322通过排风风门316从ahu302排出。
60.风门316-320中的每一个可通过致动器运行。例如,排风风门316可通过致动器324运行,混合风门318可通过致动器326运行,且外部空气风门320可通过致动器328运行。致动器324-328可经由通信链路332与ahu控制器330通信。致动器324-328可从ahu控制器330接收控制信号,并且可向ahu控制器330提供反馈信号。反馈信号可包含例如:电流致动器或风门位置的指示、由致动器施加的力矩或力的大小、诊断信息(例如,由致动器324-328执行的诊断测试的结果)、状态信息、调测信息、配置设置、校准数据,和/或可由致动器324-328收集、存储或使用的其它类型的信息或数据。ahu控制器330可以是配置成使用一个或多个控制算法(例如,基于状态的算法、极值搜索控制(esc)算法、比例-积分(pi)控制算法、比例-积分-微分(pid)控制算法、模型预测控制(mpc)算法、反馈控制算法等)来控制致动器324-328的节能器控制器。
61.仍然参考图3,ahu 302示出为包含定位在送风管312内的冷却盘管334、加热盘管336和风扇338。风扇338可配置成迫使送风310通过冷却盘管334和/或加热盘管336并将送风310提供到楼宇分区306。ahu控制器330可经由通信链路340与风扇338通信以控制送风310的流速。在一些实施例中,ahu控制器330通过调制风扇338的速度来控制施加到送风310的加热量或冷却量。
62.冷却盘管334可经由管道342从水边系统200(例如,从冷水环路216)接收冷却流体,并且可经由管道344将冷却流体返回到水边系统200。阀346可沿着管道342或管道344定位,以控制冷却流体通过冷却盘管334的流速。在一些实施例中,冷却盘管334包含多个冷却
盘管级,它们可独立激活和撤销激活(例如,通过ahu控制器330、通过bms控制器366等),以调制施加到送风310的冷却量。
63.加热盘管336可经由管道348从水边系统200(例如,从热水环路214)接收加热流体,并且可经由管道350将加热流体返回到水边系统200。阀352可沿着管道348或管道350定位,以控制加热流体通过加热盘管336的流速。在一些实施例中,加热盘管336包含多个加热盘管级,它们可独立激活和撤销激活(例如,通过ahu控制器330、通过bms控制器366等),以调制施加到送风310的加热量。
64.阀346和352中的每一个可由致动器控制。例如,阀346可由致动器354控制,阀352可由致动器356控制。致动器354-356可经由通信链路358-360与ahu控制器330通信。致动器354-356可从ahu控制器330接收控制信号,并且可向控制器330提供反馈信号。在一些实施例中,ahu控制器330从定位在送风管312中(例如,在冷却盘管334和/或加热盘管336的下游)的温度传感器362接收送风温度的测量值。ahu控制器330还可从位于楼宇分区306中的温度传感器364接收楼宇分区306的温度的测量值。
65.在一些实施例中,ahu控制器330经由致动器354-356运行阀346和352,以调制提供给送风310的加热量或冷却量(例如,以达到送风310的设定点温度或将送风310的温度维持在设定点温度范围内)。阀346和352的位置会影响冷却盘管334或加热盘管336提供给送风310的加热量或冷却量,并且可与为达到所需送风温度而消耗的能量大小相关。ahu 330可通过激活或撤销激活线圈334-336、调整风扇338的速度或这两者的组合来控制送风310和/或楼宇分区306的温度。
66.仍然参考图3,空边系统300示出为包含楼宇管理系统(bms)控制器366和客户端装置368。bms控制器366可包含一个或多个计算机系统(例如,服务器、管理控制器、子系统控制器等),用作空边系统300、水边系统200、hvac系统100和/或服务楼宇10的其它可控制系统的系统级控制器、应用程序或数据服务器、头节点或主控制器。bms控制器366可根据相似或不同的协议(例如,lon、bacnet等)经由通信链路370与多个下游楼宇系统或子系统(例如,hvac系统100、安防系统、照明系统、水边系统200等)通信。在各种实施例中,ahu控制器330和bms控制器366可以是分开的(如图3中所示),或者集成在一起。在集成实施方案中,ahu控制器330可以是配置成由bms控制器366的处理器执行的软件模块。
67.在一些实施例中,ahu控制器330从bms控制器366接收信息(例如,命令、设定点、运行边界等),并向bms控制器366提供信息(例如,温度测量值、阀或致动器位置、运行状态、诊断等)。例如,ahu控制器330可向bms控制器366提供来自温度传感器362-364的温度测量值、设备开/关状态、设备运行能力和/或任何其它可供bms控制器366用于监测或控制楼宇分区306内的可变状态或条件的信息。
68.客户端装置368可包含一个或多个人机界面或客户端界面(例如,图形用户界面、报告界面、基于文本的计算机界面、面向客户端的网络服务、向网络客户端提供页面的网络服务器等),用于控制、查看hvac系统100、其子系统和/或装置,或以其它方式与其交互。客户端装置368可以是计算机工作站、客户端终端、远程或本地接口或任何其它类型的用户接口装置。客户端装置368可以是固定终端或移动装置。例如,客户端装置368可以是台式计算机、具有用户接口的计算机服务器、膝上型计算机、平板计算机、智能电话、pda或任何其它类型的移动或非移动装置。客户端装置368可经由通信链路372与bms控制器366和/或ahu控
制器330通信。
69.楼宇管理系统
70.现在参考图4,根据一些实施例,示出了楼宇管理系统(bms)400的框图。bms 400可在楼宇10中实施,用于自动监测和控制各种楼宇功能。bms 400示出为包含bms控制器366和多个楼宇子系统428。楼宇子系统428示出为包含楼宇电气子系统434、信息通信技术(ict)子系统436、安防子系统438、hvac子系统440、照明子系统442、电梯/自动扶梯子系统432和消防安全子系统430。在各种实施例中,楼宇子系统428可包含更少的、额外的或替代的子系统。例如,楼宇子系统428可另外或替代地包含制冷子系统、广告或标牌子系统、烹饪子系统、售卖子系统、打印机或复制服务子系统,或任何其它类型的使用可控制设备和/或传感器来监测或控制楼宇10的楼宇子系统。在一些实施例中,楼宇子系统428包含水边系统200和/或空边系统300,如参考图2-3所描述。
71.楼宇子系统428中的每一个可包含任何数目个装置、控制器和连接,用于完善其各个功能和控制活动。hvac子系统440可包含许多与hvac系统100相同的组件,如参考图1-3所描述。例如,hvac子系统440可包含制冷机、锅炉、任何数目个空气处理单元、节能器、区域控制器、管理控制器、致动器、温度传感器和其它用于控制楼宇10内的温度、湿度、气流或其它可变条件的装置。照明子系统442可包含任何数目个照明器具、镇流器、照明传感器、减光器或其它配置成可控制地调整提供给楼宇空间的光量的装置。安防子系统438可包含占用传感器、视频监控摄像机、数字视频记录器、视频处理服务器、入侵检测装置、访问控制装置和服务器,或其它安防相关装置。
72.仍然参考图4,bms控制器366示出为包含通信接口407和bms接口409。接口407可促进bms控制器366和外部应用程序(例如,监测和报告应用程序422、企业控制应用程序426、远程系统和应用程序444、驻留在客户端装置448上的应用程序等)之间的通信,以允许用户控制、监测和调整bms控制器366和/或子系统428。接口407还可促进bms控制器366和客户端装置448之间的通信。bms接口409可促进bms控制器366和楼宇子系统428(例如,hvac、照明、安防、电梯、配电、业务等)之间的通信。
73.接口407、409可以是或包含有线或无线通信接口(例如,插口、天线、发射器、接收器、收发器、电线接头等),用于与楼宇子系统428或其它外部系统或装置进行数据通信。在各种实施例中,经由接口407、409的通信可以是直接的(例如,本地有线或无线通信),或经由通信网络446(例如,wan、互联网、蜂窝网络等)。例如,接口407、409可包含用于经由基于以太网的通信链路或网络发送和接收数据的以太网卡和端口。在另一实例中,接口407、409可包含用于经由无线通信网络通信的wi-fi收发器。在另一实例中,接口407、409中的一个或两个可包含蜂窝或移动电话通信收发器。在一个实施例中,通信接口407是电力线通信接口,bms接口409是以太网接口。在其它实施例中,通信接口407和bms接口409均为以太网接口,或为同一以太网接口。
74.仍然参考图4,bms控制器366示出为包含处理电路404,所述处理电路包含处理器406和存储器408。处理电路404能够可通信地连接到bms接口409和/或通信接口407,使得处理电路404及其各种组件可以经由接口407、409发送和接收数据。处理器406可实施为通用处理器、专用集成电路(asic)、一个或多个现场可编程门阵列(fpga)、一组处理组件或其它合适的电子处理组件。
75.存储器408(例如,存储器、存储器单元、存储装置等)可包含一个或多个装置(例如,ram、rom、快闪存储器、硬盘存储装置等),用于存储数据和/或计算机代码以完善或促进在本技术中描述的各个过程、层和模块。存储器408可以是或包含易失性存储器或非易失性存储器。存储器408可包含数据库组件、目标代码组件、脚本组件,或任何其它类型的用于支持在本技术中描述的各个活动和信息结构的信息结构。根据一些实施例,存储器408经由处理电路404可通信地连接到处理器406,并且包含用于(例如,通过处理电路404和/或处理器406)执行本文所描述的一个或多个过程的计算机代码。
76.在一些实施例中,bms控制器366在单个计算机(例如,一个服务器、一个壳等)内实施。在各种其它实施例中,bms控制器366可跨多个服务器或计算机(例如,所述服务器或计算机可能位于分散的位置)分布。此外,尽管图4将应用程序422和426示出为存在于bms控制器366外部,但是在一些实施例中,应用程序422和426可托管于bms控制器366内(例如,存储器408内)。
77.仍然参考图4,存储器408示出为包含企业集成层410、自动化测量和验证(am&v)层412、需求响应(dr)层414、故障检测和诊断(fdd)层416、综合控制层418,及楼宇子系统集成层420。层410-420可配置成从楼宇子系统428和其它数据源接收输入,基于输入确定楼宇子系统428的最优控制动作,基于最优控制动作产生控制信号,并将所产生的控制信号提供到楼宇子系统428。以下段落描述由bms 400中的层410-420中的每一个执行的一些通用功能。
78.企业集成层410可配置成利用支持各种企业级应用程序的信息和服务来服务客户端或本地应用程序。例如,企业控制应用程序426可配置成提供对图形用户界面(gui)或任何数目个企业级业务应用程序(例如,会计系统、用户识别系统等)的跨子系统控制。企业控制应用程序426可另外或替代地配置成提供配置gui,用于配置bms控制器366。在又其它实施例中,企业控制应用程序426可基于在接口407和/或bms接口409处接收的输入而与层410-420协同工作,以优化楼宇性能(例如,效率、能量使用、舒适度或安全性)。
79.楼宇子系统集成层420可配置成管理bms控制器366和楼宇子系统428之间的通信。例如,楼宇子系统集成层420可从楼宇子系统428接收传感器数据和输入信号,并向楼宇子系统428提供输出数据和控制信号。楼宇子系统集成层420还可配置成管理楼宇子系统428之间的通信。楼宇子系统集成层420跨多个多供应商/多协议系统转换通信(例如,传感器数据、输入信号、输出信号等)。
80.需求响应层414可配置成响应于满足楼宇10的需求而优化资源使用(例如,用电、天然气使用、用水等)和/或此类资源使用的货币成本。优化可基于分时价格、限用信号(curtailment signal)、能量可用性或从设施提供者、分布式能量产生系统424、能量存储装置427(例如,高温tes 242、低温tes 244等)或其它源接收的其它数据。需求响应层414可从bms控制器366的其它层(例如,楼宇子系统集成层420、综合控制层418等)接收输入。从其它层接收的输入可包含环境或传感器输入,例如温度、二氧化碳水平、相对湿度水平、空气质量传感器输出、占用传感器输出、房间计划表等等。输入还可包含诸如用电(例如,以kwh为单位来表示)、热负荷测量值、定价信息、计划定价、平稳定价、公用事业公司发出的限用信号等等的输入。
81.根据一些实施例,需求响应层414包含用于响应于它接收的数据和信号的控制逻辑。这些响应可包含以受控制的方式与综合控制层418中的控制算法通信,改变控制策略,
改变设定点,或激活/撤销激活楼宇设备或子系统。需求响应层414还可包含配置成确定何时使用所存储的能量的控制逻辑。例如,需求响应层414可确定刚好在使用高峰期开始之前使用来自能量存储装置427的能量。
82.在一些实施例中,需求响应层414包含配置成基于一个或多个表示需求的输入或基于需求(例如,价格、限用信号、需求水平等)而主动地发起控制动作(例如,自动改变设定点)的控制模块,这可最大限度地降低能量成本。在一些实施例中,需求响应层414使用设备模型来确定一组最优控制动作。设备模型可包含例如描述由各组楼宇设备执行的输入、输出和/或功能的热力学模型。设备模型可表示楼宇设备的集合(例如,分设备、制冷机组等)或单独的装置(例如,单独的制冷机、加热器、泵等)。
83.需求响应层414可进一步包含或利用一个或多个需求响应方针定义(例如,数据库、xml文件等)。方针定义可由用户(例如,经由图形用户界面)编辑或调整,使得响应于需求输入而发起的控制动作可以根据用户的应用、所需的舒适度、特定的楼宇设备或其它问题进行定制。例如,需求响应方针定义可指定:哪一设备可响应于特定需求输入接通或断开、系统或设备应断开多长时间、哪些设定点可以改变、可允许设定点调整范围是什么、在返回到正常安排的设定点之前保持高需求设定点多长时间、接近能力极限的程度、使用哪些设备模式、进入和离开能量存储装置(例如,储热罐、电池组等)的能量传送速率(例如,最大速率、报警速率、其它速率边界信息等),以及何时调度现场能量产生(例如,经由燃料电池、电动发电机组等)。
84.综合控制层418可配置成使用楼宇子系统集成层420和/或需求响应层414的数据输入或输出来进行控制决策。由于楼宇子系统集成层420提供了子系统集成,所以综合控制层418可以集成子系统428的控制活动,使得子系统428表现为单个集成的超级系统。在一些实施例中,综合控制层418包含使用来自多个楼宇子系统的输入和输出提供相比于单独子系统可独自提供的舒适度和节能程度更高的舒适度和节能程度的控制逻辑。例如,综合控制层418可配置成使用来自第一子系统的输入针对第二子系统进行节能控制决策。这些决策的结果可被传送回到楼宇子系统集成层420。
85.综合控制层418示出为在逻辑上位于需求响应层414下方。综合控制层418可配置成通过使楼宇子系统428和它们的相应控制环路能够与需求响应层414协同受控来增强需求响应层414的有效性。相比于常规系统,此配置可有利地减少破坏性的需求响应行为。例如,综合控制层418可配置成确保,根据需求响应向上调整冷却水温度(或直接或间接影响温度的另一组件)的设定点不会导致风扇能量(或用于冷却空间的其它能量)增加,从而导致总楼宇能耗高于制冷机所节省的能量。
86.综合控制层418可配置成向需求响应层414提供反馈,使得需求响应层414检查约束(例如,温度、照明水平等)是否被适当地维持,即使是在要求的减载正在进行中时。约束还可包含与安全性、设备运行极限和性能、舒适度、防火规范、电气规范、能源规范等等有关的设定点或所感测边界。综合控制层418同样在逻辑上位于故障检测和诊断层416及自动化测量和验证层412下方。综合控制层418可配置成基于超过一个楼宇子系统的输出将计算出的输入(例如,聚合体)提供到这些更高层级。
87.自动化测量和验证(am&v)层412可配置成验证综合控制层418或需求响应层414所指示的控制策略是否运作良好(例如,使用通过am&v层412、综合控制层418、楼宇子系统集
成层420、fdd层416或以其它方式聚合的数据来验证)。am&v层412所进行的计算可基于各个bms装置或子系统的楼宇系统能量模型和/或设备模型。例如,am&v层412可比较模型预测输出与楼宇子系统428的实际输出,以确定模型的准确性。
88.故障检测和诊断(fdd)层416可配置成为楼宇子系统428、楼宇子系统装置(即,楼宇设备)及供需求响应层414和综合控制层418使用的控制算法提供持续故障检测。fdd层416可从综合控制层418、直接从一个或多个楼宇子系统或装置或从另一数据源接收数据输入。fdd层416可自动诊断和响应检测到的故障。对检测到的或诊断到的故障的响应可包含向用户、维护调度系统或配置成尝试修复故障或解决故障的控制算法提供警告消息。
89.fdd层416可配置成使用楼宇子系统集成层420处可用的详细子系统输入来输出有故障的组件的特定识别或故障原因(例如,风门连杆松动)。在其它示例性实施例中,fdd层416配置成向综合控制层418提供“故障”事件,所述综合控制层响应于接收到的故障事件而执行控制策略和方针。根据一些实施例,fdd层416(或由综合控制引擎或业务规则引擎执行的方针)可关闭系统或指导有故障的装置或系统周围的控制活动,以减少能源浪费、延长设备寿命或确保适当的控制响应。
90.fdd层416可配置成存储或访问各种不同的系统数据存储区(或实时数据的数据点)。fdd层416可使用数据存储区的一些内容来识别设备层级(例如,特定制冷机、特定ahu、特定终端单元等)处的故障,并使用其它内容来识别组件或子系统层级处的故障。例如,楼宇子系统428可产生指示bms 400及其各种组件的性能的时间(即,时间序列)数据。由楼宇子系统428产生的数据可包含测得或计算出的值,它们显示统计特征并提供关于所执行的对应系统或过程(例如,温度控制过程、流控制过程等)相对于其设定点的误差水平的信息。这些过程可由fdd层416检查,以揭露系统性能何时开始降低,并且警告用户在恶化之前修复故障。
91.测量电容器寿命/调整超级电容器充电电压
92.现在参考图5-8,根据一些实施例,示出了用于确定理想充电电压和调整超级电容器的充电电压的各种系统和过程。简单来说,图5示出包含具有可调整充电电压的超级电容器的致动器的框图。图6是用于控制超级电容器的充电电压的过程的流程图。图7是用于确定对应于致动器操作的能量值的过程的流程图。图8是用于测量与故障安全装置相关联的参数的过程的流程图。
93.特别参考图5,根据一些实施例,示出了包含具有可调整充电电压的超级电容器的致动器的框图。致动器502可用于服务楼宇(例如,楼宇10)。例如,致动器502可以是水边系统200的一部分。致动器502可以是故障安全装置(例如,配置成在断电时在特定位置发生故障的装置),也可以是其一部分。在一些实施例中,致动器502集成于楼宇管理系统(例如,bms 400内)。例如,致动器502可向bms 400发送服务请求指示。致动器502可有助于减少超级电容器中的老化效应。通过减少电容器的老化效应,致动器502可增加标称容量并降低超级电容器的等效串联电阻(“esr”)。因此,超级电容器的生命周期可以延长,并且超级电容器在其生命周期后期可以充电至更高的电压。
94.致动器502提供数个优于现有致动器的益处。致动器502可以是故障安全装置,它包含有助于在发生故障事件(例如,失去电源等)的情况下将致动器502驱动到故障安全位置的电容器。传统的故障安全装置通常包含用于促进返回到故障安全位置的弹簧。弹簧将
故障安全位置限制到极限(例如,致动器完全延伸、致动器完全缩回)。此外,包含用于促进返回到故障安全位置的弹簧的故障安全装置需要故障安全装置持续对抗弹簧的作用。例如,故障安全装置在正常运行期间必须持续克服弹簧的作用,因此需要额外的能量为故障安全装置供电,使得故障安全装置效率低下。致动器502可促进返回非极端的故障安全位置(例如,在完全延伸和完全缩回之间)。例如,在三阀情形中,致动器502可返回到在所述三阀中间的故障安全位置。在各种实施例中,致动器502不包含用于促进返回到故障安全位置的弹簧,因此不必对抗弹簧的作用,由此相比于传统的故障安全装置,提高了致动器502的效率。
95.致动器502还提供数个优于现有的电容式返回致动器(capacitive return actuator)的益处。传统的电容式返回故障安全装置包含用于促进返回到故障安全位置的电容器。电容器的性能(例如,电容、充电时间、最大额定电压等)可随时间推移而降低,由此限制了电容器提供将故障安全装置驱动到故障安全位置的能量的能力。考虑到电容器性能损耗,传统的电容式返回故障安全装置包含超大电容器(例如,超级电容器等)。例如,需要150法拉电容器的应用可包含300法拉电容器作为缓冲器。超大电容器可增加故障安全装置的尺寸和/或成本。此外,传统的电容式返回故障安全装置不提供关于电容器的寿命的指示。例如,在使用两年后,故障安全装置中的电容器可能已经降级到无法提供将故障安全装置驱动到故障安全位置所需要的能量的程度。继续此实例,传统的故障安全装置可能不提供电容器已降级的指示,用户可能不知道故障安全装置在故障事件中无法返回到故障安全位置。
96.相比之下,致动器502包含用于促进返回到故障安全位置的电容器。致动器502可测量电容器的寿命,并向bms提供寿命指示。例如,致动器502可测量电容器的有效电容作为电容器寿命的指示。此外,致动器502可测量将故障安全装置返回到故障安全位置所需要的能量大小,并比较能量大小与有效电容以确定电容器是否能够提供足够能量将故障安全装置返回到故障安全位置。通过比较有效电容与将故障安全装置返回到故障安全位置所需要的能量大小,致动器502可以延长装置寿命。例如,电容器可从300法拉的初始容量下降到150法拉的有效容量。但是,如果将故障安全装置返回到故障安全位置所需要的能量大小仅需要80法拉的有效电容,那么致动器502可以确定电容器仍然有用,由此延长装置寿命。
97.在各种实施例中,致动器502可警告bms装置需要更换。例如,致动器502可确定将电容器充电到具有足以将故障安全装置返回到故障安全位置的能量所需要的充电电压过高(例如,会导致电容器击穿),并且可向bms发送致动器502和/或电容器应该更换的指示。在一些实施例中,所确定的充电电压与阈值电压比较以确定电容器寿命的指示。在一些实施例中,致动器502可确定驱动故障安全装置的速度。例如,基于测得的寿命,致动器502可方便用户在第一速度和第二速度之间进行选择。第一速度可与第一寿命相关联(例如,60秒行程/2年),第二速度可与第二寿命相关联(例如,120秒行程/5年)。
98.在一些实施例中,驱动故障安全装置的速度可基于所确定的电容器寿命状态而动态地更新和/或选择(例如,无用户干预)。例如,致动器502可减缓驱动故障安全装置的速度,以延长装置寿命。另外,致动器502可调整电容器的充电电压,以延长电容器寿命。致动器502可基于比较有效电容与将故障安全装置返回到故障安全位置所需要的能量来确定电容器的充电电压。例如,致动器502在第一充电电压下可能需要80法拉的电容将故障安全装
置返回到故障安全位置,但是仅具有60法拉的有效电容。但是,致动器502可基于所需要的能量大小和电容器的有效电容的比较而确定所需要的能量大小可以利用较高的第二充电电压下的60法拉有效电容实现。因此,致动器502可在第二充电电压下对电容器充电。这可延长装置寿命。另外或替代地,致动器502可确定对电容器充电所需要的时间量。例如,致动器502可确定与将故障安全装置返回到故障安全位置相关联的有效电阻以及电容器的有效电容,并由此计算对电容器充电所需要的时间。在一些实施例中,致动器502可提供与致动器502的操作相关联的诊断。例如,致动器502可测试电容器是否可以提供足够能量将故障安全装置驱动到故障安全位置。致动器502可提供测试的指示(例如,在测试未通过的情况下警告用户,等等)。
99.致动器502示出为包含电容器504、电源506、电压调节器514、电机516、电阻器517、驱动装置518、位置传感器520、通信电路526和处理电路536。在此示例性实施例中,图5具有用于楼宇子系统428的致动器502。但是,在其它实施例中,针对不同装置使用具有可调整充电电压的超级电容器的实施方案。在一些实施例中,装置可以是在楼宇子系统428之外或在楼宇子系统428的不同子系统之内的装置。例如,装置可以是制冷机、锅炉、屋顶空气处理单元(ahu)或其它客户端装置,而不是致动器。
100.致动器502示出为包含可通信地耦合到电机516的处理电路536。在一些实施例中,电机516是无刷dc(“bldc”)电机、dc步进电机、dc有刷电机和ac无刷电机或本领域中已知的任何类型的电动机中的至少一个。在一些实施例中,dc步进电机用于更精确的电机控制,使得电机位置被知晓。处理电路536示出为包含主致动器控制器524、存储器532和处理器534。处理器534可以是通用或专用处理器、专用集成电路(“asic”)、一个或多个现场可编程门阵列(“fpga”)、一组处理组件或其它合适的处理组件。处理器534可配置成执行存储在存储器532中或从其它计算机可读媒体(例如,cdrom、网络存储装置、远程服务器等)接收的计算机代码或指令。
101.存储器532可包含一个或多个装置(例如,存储器单元、存储器装置、存储装置等),用于存储数据和/或计算机代码以完善和/或促进本公开中描述的各个过程。存储器532可包含随机存取存储器(“ram”)、只读存储器(“rom”)、硬盘驱动存储装置、临时存储装置、非易失性存储器、快闪存储器、光学存储器或任何其它合适的用于存储软件对象和/或计算机指令的存储器。存储器532可包含数据库组件、目标代码组件、脚本组件,或任何其它类型的用于支持在本公开中描述的各个活动和信息结构的信息结构。存储器532可经由处理电路536可通信地连接到处理器534,并且可包含用于(例如,通过处理器534)执行本文所描述的一个或多个过程的计算机代码。当处理器534执行存储在存储器532中的指令时,处理器534通常将致动器502(更具体地为处理电路536)成完成此类活动。
102.主致动器控制器524可配置成从通信电路526接收外部控制数据530(例如,位置设定点、速度设定点等),并从位置传感器520接收位置信号522。主致动器控制器524可配置成基于位置信号522而确定电机516和/或驱动装置518的位置。在一些实施例中,主致动器控制器524从额外源接收数据。例如,主致动器控制器524可从楼宇子系统428内的传感器(例如,温度传感器、湿度传感器等)接收信息,如参考图4详细地描述。
103.电机516可耦合到驱动装置518。驱动装置518可以是驱动机构、毂,或其它配置成驱动或实现hvac系统组件(例如,设备538)的移动的装置。例如,驱动装置可配置成接收风
门、阀或任何其它可移动hvac系统组件的轴以便驱动(例如,旋转)轴。在一些实施例中,致动器502包含配置成辅助将驱动装置518耦合到可移动hvac系统组件的耦合装置。例如,耦合装置可促进将驱动装置518附接到阀或风门轴。
104.电阻器517可与电容器504串联或并联(例如,在与电容器504相同的分支中),并且可以是任何类型的电阻器,包含分流电阻器。在一些实施例中,电阻器517可在与电容器504相同的分支中包括多个电阻器。在一些实施例中,电阻器517可以是配置成将电容器504的输出电压降低到电机516的预定义输入电压的分流电阻器。在一些实施例中,致动器502可包含靠近或位于电阻器517处的电压传感器,使得电压传感器可以跨电阻器517感测压降。使用电阻器517的已知电阻和跨电阻器517的压降,可以确定电流(例如,电流(i)=电压(v)/电阻(r))。
105.位置传感器520可包含霍尔效应传感器、电位计、光学传感器、步进计数器、内部时间、反电磁频率(emf)传感器,或其它类型的配置成测量电机516和/或驱动装置518的旋转位置的传感器。位置传感器520可向处理电路536提供位置信号522。主致动器控制器524可使用位置信号522确定是否运行电机516。例如,主致动器控制器524可比较驱动装置518的当前位置与经由外部数据输入530接收的位置设定点,并且可运行电机516以到达位置设定点。在一些实施例中,位置传感器520可以是接收电机516的步进指示的步进计数器,或者是确定电机516的反emf并计算电机516或驱动装置518的位置的反emf传感器。通过使用步进计数器或反emf传感器,电机516的位置可以更好的确定,并被提供给主致动器控制器524。
106.致动器502进一步示出为包含通信电路526。通信电路526可以是有线或无线通信链路,并且可以使用各种不同通信协议中的任一个(例如,bacnet、lon、wifi、蓝牙、nfc、tcp/ip等)。在一些实施例中,通信电路526是一种配置成输出或提供模拟通信的电路。例如,通信电路526可使用脉宽调制(pwm)波信号、锯齿信号或任何其它类型的模拟信号提供有关致动器502的通信和信息。在一些实施例中,通信电路526可包含变换任何信号所需要的任何模数转换器或数模转换器。模拟信号可驱动关于电容器504寿命的灯光警告或声音警告。在一些实施例中,通信电路526是配置成桥接致动器502和外部系统或装置的通信的集成电路、芯片或微控制器单元(“mcu”)。在一些实施例中,通信电路526是江森自控片上bacnet(johnson controls bacnet on a chip)(“jboc”)产品。例如,通信电路526可以是能够使用主/从令牌传递(“mstp”)协议通过楼宇自动化和控制网络(bacnet)通信的预认证bacnet通信模块。通信电路526可以添加到任何现有产品中,以使bacnet通信具有最小的软件和硬件设计工作量。换句话说,通信电路526为致动器502提供bacnet接口。有关jboc产品的其它细节公开于2016年7月11日提交的第15/207,431号美国专利申请中,所述申请的全部公开内容以引用的方式并入本文中。
107.通信电路526还可配置成支持致动器502内的数据通信。在一些实施例中,通信电路526可从主致动器控制器524接收内部致动器数据528。例如,内部致动器数据528可包含测得或计算出的电机力矩、致动器位置或速度、配置参数、末端挡板位置(end stop location)、行程长度参数、调测数据、设备模型数据、固件版本、软件版本、时间序列数据、停止/启动命令的累积数目、总行进距离、打开/关闭设备538(例如,阀)所需要的时间量,或致动器502内部使用或存储的任何其它类型的数据。在一些实施例中,通信电路526可将外部数据530传输到主致动器控制器524。外部数据530可包含例如:位置设定点、速度设定点、
控制信号、配置参数、末端挡板位置、行程长度参数、调测数据、设备模型数据、致动器固件、致动器软件,或可供致动器502用于运行电机516和/或驱动装置518的任何其它类型的数据。
108.在一些实施例中,外部数据530是dc电压控制信号。致动器502可以是配置成根据接收到的dc电压值控制驱动装置518的位置的线性比例致动器。例如,最小输入电压(例如,0.0vdc)可对应于驱动装置518的最小旋转位置(例如,0度、-5度等),而最大输入电压(例如,10.0vdc)可对应于驱动装置518的最大旋转位置(例如,90度、95度等)。最小和最大输入电压之间的输入电压可使致动器502将驱动装置518移动到最小旋转位置和最大旋转位置之间的中间位置。在其它实施例中,致动器502可以是非线性致动器,也可以使用不同输入电压范围或不同类型的输入控制信号(例如,ac电压或电流)来控制驱动装置518的位置和/或旋转速度。
109.在一些实施例中,外部数据530是ac电压控制信号。通信电路526可配置成传输具有标准电力线电压(例如,50/60hz下的120vac或230vac)的ac电压信号。电压信号的频率可进行调制(例如,由主致动器控制器524调制)以调整驱动装置518的旋转位置和/或速度。在一些实施例中,致动器502使用电压信号为致动器502的各种组件供电。致动器502可使用经由通信电路526接收的ac电压信号作为控制信号、电力源或这两者。在一些实施例中,电压信号从电力供应线接收,所述电力供应线向致动器502提供具有恒定或基本上恒定的频率(例如,50hz或60hz下的120vac或230vac)的ac电压。通信电路526可包含一个或多个数据连接(与电力供应线分开),致动器502通过所述数据连接从控制器或另一致动器接收控制信号(例如,0-10vdc控制信号)。
110.在一些实施例中,致动器502是楼宇子系统428中的致动器。替代地,致动器502可在楼宇子系统428之外(未示出)。致动器502可配置成连接到电容器504且由电容器504供电。致动器502可消耗电力设施的电力,并且也可以由电源506供电。致动器502的初始位置(pi)和致动器502的最终位置(pf)可输入到存储器532。致动器502的初始位置(pi)可以是在处理器534第一次接收到致动器502失去电源506电力的信号(例如,无电源的第一指示)时致动器502的位置。致动器502的最终位置(pf)可以是在致动器502返回到默认位置时致动器502(例如,致动器)的位置。
111.在一些实施例中,电容器504配置成向处理器(例如,处理器534)提供在不同时间跨电容器504的电压的值。例如,处理器534可配置成测量在致动器502处于位置pi时跨电容器504的初始电压(vi)的值、在致动器502处于位置pf时跨电容器504的最终电压(vf)的值、在第一指定时间t1跨电容器504的第一电压(v1)的值,和/或在第二指定时间t2跨电容器504的第二电压(v2)的值。在一些实施例中,第一时间(t1)和第二时间(t2)之间的差是预定时间。电压读数(例如,vi、vf、v1、v2)可输入到非易失性存储器(例如,存储器532)以用于计算确定电容(c)、供致动器502使用以返回到其默认位置(wr)的能量和/或充电电压(vc)。在一些实施例中,电容器504是由电源506充电的静电双层电容器(“edlc”)超级电容器。电源506还可配置成为致动器502供电。替代地,超过一个电源可配置成为致动器502和/或电容器504供电。
112.在一些实施例中,电容器504传输诊断信息。例如,致动器502可测试电容器504具有足够能量将故障安全装置(例如,驱动电机516)返回到故障安全位置并在测试后报告。在
一些实施例中,测试可周期性地进行(例如,在每次致动器502断电时等等)。例如,在断电后,电容器504可为电机516供电,将驱动装置518移动到故障安全位置,并且位置传感器520可确定电容器504能否进行此操作。作为响应,致动器502可向用户和/或bms控制器366提供诊断信息。在一些实施例中,诊断信息可指示电容器504和/或致动器502需要更换。在一些实施例中,致动器502包含和电源506成一直线的传感器507,用于测量由电源506提供的电流和/或电压,它们可用于确定提供到致动器502的能量,并由此确定致动器502的能耗。因此,传感器507可以是任何合适的用于测量电流、电压或能耗的传感器,例如霍耳效应传感器。
113.在一些实施例中,致动器502可提供任何诊断信息的视觉指示(例如,经由诊断led542)。诊断led 542能够可通信地耦合到主致动器控制器524,并接收电容器504和/或致动器502的诊断状态的指示。此外,诊断led 542可以接着用特定诊断颜色发光。例如,诊断led 542可以特别亮起以下颜色的光:红色=需要维护(例如,立即更换电容器504),黄色=近期需要维护(例如,近期更换电容器),绿色=不需要维护(例如,电容器工作正常)。在一些实施例中,诊断led 542可以按照特定频率(例如闪烁)点亮或遵循特定模式点亮,以提供致动器502的状态指示。这可以向在致动器502附近工作的工人提供关于致动器502或电容器504的状态的指示。
114.仍然参考图5,存储器534可配置成存储各个模块,这些模块可以计算充电电压(vc)(即,可用于对超级电容器充电的最大电压电平)。在此示例性实施例中,存储器534示出为包含主致动器控制器524、电容模块508、能量模块510和充电电压模块512。但是,在一些实施例中,存储器534包含更多模块,和/或不包含图5所示模块中的一个或多个。例如,存储器534可包含一个完成由能量模块510和电容模块508两者执行的计算的模块。
115.在一些实施例中,电容模块508配置成确定超级电容器(例如,电容器504)的电容(c)。在一些实施例中,电容模块508从存储器534接收输入。输入可对应于在时间t1如本文所述跨超级电容器或跨超级电容器分支测得的电压和在时间t2如本文所述跨超级电容器或跨超级电容器分支测得的电压;它们分别为电压v1和v2。使用这些电压读数以及安全因数(s),电容模块508可使用等式1确定超级电容器的电容:
[0116][0117]
在一些实施例中,t1和t2之间的差是预定时间长度。有利地,这可确保每次电压测量之间的时间一致,以计算电源的每个供电周期的电容。在其它实施例中,t1和t2之间的差可以是可变的,并且可取决于特定电压阈值v1或v2。在一些实施例中,电容模块508向能量模块510和充电电压模块512输出所确定的电容(c)以用于其它计算。在一些实施例中,安全因数(s)可被包含在内以向等式1提供安全因数,并且可以是任何值,包含1、《1(例如,0.4、0.6、0.8、0.9等)或》1(例如,1.1、1.2、1.3、1.4、1.5等)。
[0118]
在一些实施例中,电容模块508配置成使用另一公式确定超级电容器(例如,电容器504)的电容(c)。在一些实施例中,电容模块508从存储器534接收输入。输入可对应于:跨与超级电容器串联的电阻器(例如,电阻器517)的电流、在时间t1如本文所述跨超级电容器的超级电容器分支测得的电压和在时间t2如本文所述跨超级电容器或跨超级电容器分支测得的电压;它们分别为电流i1和i2、电压v1和v2。在一些实施例中,跨电阻器517的电流通
过确定跨电阻器的压降并使用电阻器517的已知电阻值来确定(即,i=v/r)。使用这些电压读数和电流读数及安全因数,电容模块508可使用等式2确定超级电容器的电容:
[0119][0120]
在一些实施例中,t1和t2之间的差是预定时间长度。在其它实施例中,t1和t2之间的差可以是可变的,并且可取决于特定电压阈值v1或v2。在一些实施例中,电容模块508向能量模块510和充电电压模块512输出所确定的电容(c)以用于其它计算。在一些实施例中,安全因数(s)的值与等式1的安全因数相同。在其它实施例中,安全因数(s)的值与等式1的安全因数不同。如本文所描述,所确定的电容(c)可以使用等式1或等式2确定。
[0121]
在一些实施例中,电容模块508配置成通过测量电容器基于平均充电数(例如,10次充电)的剩余寿命比(rl)来确定超级电容器的剩余寿命。例如,电容模块508可从存储器534接收输入。输入可对应于在时间t1跨超级电容器测得的电压和在时间t2跨超级电容器测得的电压;它们分别为电压v1和v2。在一些实施例中,t1是超级电容器开始充电的时间,时间t2是超级电容器充至满电的时间。使用这些电压读数,针对多个不同充电事件,电容模块508可以确定在超级电容器的初始n次(例如,前10次)充电(例如,电源的供电周期)期间的平均电容及在超级电容器的另外n次(例如,第50次到第60次)充电期间的平均电容其中电容如关于等式1或等式2及本文中所描述的那样确定,并使用等式3、4和5计算rl:
[0122][0123][0124][0125]
在一些实施例中,0.85的剩余寿命比(rl)可指示超级电容器开始发生故障,可能近期内需要更换。在其它实施例中,0.82的rl可指示超级电容器已经发生故障且需要更换。rl比可如本文中所描述的那样用于提供关于超级电容器的剩余寿命的指示。在一些实施例中,rl比可用于确定超级电容器是否应该更换,并且可被提供给bms控制器366或客户端装置448的各种组件,以提供关于超级电容器寿命的警告或指示。
[0126]
在一些实施例中,能量模块510配置成确定用于装置(例如,致动器502)在失去电源之后返回到默认位置的能量值(wr)。另外,wr的计算可存储在非易失性存储器(例如,存储器532)中。在通过能量模块510确定wr之后,wr的值可输出到充电电压模块512。在一些实施例中,能量模块510通过获取初始能量wi和最终能量wf这两个能量值之间的差来计算wr。wi、wf和wr分别使用等式6、等式7和等式8确定:
[0127][0128][0129]
wr=s(w
i-wf)
ꢀꢀꢀ
(8)
[0130]
其中c是来自电容模块508的计算出的电容,vi是在致动器502处于初始位置pi时跨
超级电容器的电压,vf是在致动器502处于最终位置pf时跨超级电容器的电压,s是可以等于也可以不等于等式1和2的安全因数的安全因数。
[0131]
在一些实施例中,充电电压模块512配置成确定充电电压(vc)(即,可用于对超级电容器充电的最大电压电平)。例如,充电电压模块512计算vc,并将电压数据输出到电压调节器514以便调节电容器504。在一些实施例中,充电电压模块512从存储器532内的电容模块508和能量模块510接收输入,电容模块508和能量模块510分别包含电容值(c)和能量值(wr)。使用先前确定的c和wr的值,充电电压模块512可以使用等式9计算充电电压的:
[0132][0133]
其中wr是用于在失去电源之后将装置返回到默认位置的能量,c是超级电容器的电容,s是与等式1、2和8的安全因数可以相同也可以不相同的安全因数。在完成充电电压计算之后,充电电压模块512可配置成向电压调节器514输出所确定的充电电压值作为电压数据。
[0134]
电压调节器514可配置成控制充电电压(vc)。在一些实施例中,电压调节器514采用配置成通过针对电源的每个供电周期改变电源的反馈电阻来控制vc的电位器的形式。但是,在其它实施例中,电压调节器可采用配置成通过针对电源的每个供电周期改变附接到调节器反馈引脚上的反馈电阻来控制vc的数模转换器的形式。在又其它实施例中,电压调节器可采用配置成通过针对电源的每个供电周期改变电源的反馈电阻来控制vc的硅可控整流器的形式。在又其它实施例中,电压调节器可采用配置成通过针对电源的每个供电周期调整的可变输出来控制vc的可调整电源输出的形式。当致动器502第一次通电时,处理器534可将vc初始化为电容器504的额定电压。在一些实施例中,针对电源的每个周期,计算出的vc作为电压数据从充电电压模块512输入到电压调节器514。
[0135]
在一些实施例中,电压调节器514包含升压-降压拓扑或其它组合步升转换器与步降转换器或增加/减小输入电压的类似装置。确切地说,在此类实施例中,电压调节器514包含离散升压-降压拓扑,如图11中详细地示出。例如,电压调节器514可包含多个组件(例如,mosfet晶体管电阻器等),用于使供应到电容器504的电压(例如,vc)步升(即,增加)或步降(即,减小)。但是,在其它实施例中,本文所述的升压-降压拓扑可被包含在电源506中,或者可以是致动器502的独立组件,示出为升压-降压转换器515。在一些实施例中,升压-降压转换器515可由处理电路536或另一控制器(例如,微控制器)控制。在一些实施例中,升压-降压转换器515的拓扑可以改变以对电容器506充电或将其耗尽,如下文关于图11更详细地描述。
[0136]
在一些实施例中,存储器532进一步包含人工智能(ai)模块540。ai模块540能够与存储器的其它模块或组件以及主致动器控制器524可通信地耦合,并且可配置成通过实施使一个或多个变量(例如,vc、wf、wi、wf等)与电容器504的寿命相关(例如,保持rl接近或等于1)的机器学习算法来优化电容器504的寿命。在一些实施例中,ai模块540可实施使本文所述的各个变量相关的模型(例如,线性回归模型、逻辑回归模型、朴素贝叶斯分类器、群集模型等),并指示主致动器控制器524实施一个或多个不同值。在一个实例中,ai模块540可使电压调节器514的控制充电电压与电容器504的寿命相关,并且因此确定要在不同时间点施加到电容器504的最优控制充电电压。在另一实例中,ai模块540可确定用于实现电容器
504的最优寿命的致动器502的最优初始和最终能量,然后将致动器的最优初始和最终能量提供到主致动器控制器524。
[0137]
现在参考图6,根据一些实施例,示出了用于控制超级电容器的充电电压的过程的流程图。过程600可配置成针对装置电源的每个供电周期重复。通过持续控制超级电容器的充电电压,使其等于所需最小运行电压,过程600允许超级电容器在接近超级电容器生命周期开始时以较低电压充电,从而减少电容器的老化效应。接着,超级电容器可以在超级电容器生命周期的后期充电至更高电压,以抵消由老化效应导致的电容减少。在一些实施例中,过程600由存储器532的各种组件执行。在其它实施例中,过程600由存储器532之外的组件完成,例如由致动器502之外的控制器完成。
[0138]
过程600示出为包含跨超级电容器测量第一电压(步骤602)。第一电压(v1)可由处理电路536内的处理器534在时间t1跨超级电容器(例如,电容器504)测得。时间t1可以是在第二时间t2之前特定时间量出现的预定值。例如,时间t1可在时间t2之前一分钟出现。测量值v1可被输入回到存储器(例如,存储器532)中,以用于在电容模块508中计算电容(c)。
[0139]
过程600示出为包含跨超级电容器测量第二电压(步骤604)。第二电压(v2)可由处理器534在第二特定时间t2跨超级电容器(例如,电容器504)测得。时间t2可由处理器534预先确定为在第一时间t1之后特定时间量。电压测量值v2可被输入到非易失性存储器(例如,存储器532)中,以便在电容模块508中计算电容(c)。在一些实施例中,步骤602-604包含通过已知负载对电容器放电。另外或替代地,步骤602-604可包含基于通过已知负载的放电而确定电容器的输出电流。在各种实施例中,电容器的输出电流可用于确定电容器的有效电容。
[0140]
过程600示出为包含使用第一和第二电压计算电容(步骤606)。在一些实施例中,步骤606通过存储在存储器中的电容模块508内的等式实现。一旦第一和第二电压的值被测得并存储在存储器中,电容模块508就可利用同样保存在存储器中的等式确定电容(c)。应用于电容的等式可与参考图5更详细地描述的等式1或等式2相同。
[0141]
过程600示出为包含使用计算出的电容计算充电电压(步骤608)。计算出的电容可以是在步骤606中确定的电容。在一些实施例中,充电电压模块512使用存储在存储器(例如,存储器532)内的等式确定充电电压来完成步骤608。充电电压(vc)计算为所需最小运行电压,用于确保故障安全返回的正确运行。例如,致动器的故障安全返回是指致动器在失去电源后返回到默认位置。向超级电容器施加所需最小运行电压减少了电容器的老化效应,并延长了超级电容器的生命周期。用于确定充电电压的等式可以是参考图5所描述的等式9,其中wr是供致动器使用以返回到默认位置的计算出的能量值,c是计算出的电容。在一些实施例中,步骤608包含比较计算出的电容与故障安全返回所需的能量大小。例如,过程600可包含测量将致动器从第一位置驱动到故障安全位置所需要的能量大小,并比较测得的能量大小与电容器的有效电容以确定电容器的充电电压。在一些实施例中,过程600可包含将电容器寿命的指示发送到bms。例如,过程600可包含确定电容器的充电电压,如上方实例中所描述,比较充电电压与电容器的击穿电压,并基于比较向bms发送装置寿命的指示。在一些实施例中,电容器寿命的指示可指示电容器需要更换。
[0142]
过程600示出为包含向超级电容器施加充电电压(vc)(步骤610)。在步骤608完成且充电电压确定之后,步骤610可由存储器中的充电电压模块512和电压调节器(例如,参考
图5所描述的电压调节器514)完成。在一些实施例中,处理器534经由参考图5详细描述的通信电路526将充电电压的值作为电压数据从存储器传递到电压调节器514。然后,处理器534将用于电源506的供电周期的电容器的最终充电电压设置为计算出的vc。超级电容器的最终充电电压可通过经由电压调节器514调节电容器的电源506来控制。
[0143]
在一些实施例中,电容器504在初始化或通电后充至满电,以便保证电容器504可以在发生故障安全事件的情况下提供足够的能量大小。例如,电容器504可首先充电到最大值,而不是所需最小运行电压,以确保可用能量足够。在此类实施例中,电容器504能够经由泄漏电流缓慢地达到所需最小运行电压。换句话说,电容器504能够随时间推移缓慢地泄漏电流,以达到期望的所需最小运行电压。在其它实施例中,能量可经由分流或限制电阻器(例如,电阻器517)耗散,以便将完全充电的电容器504降低到期望的所需最小运行电压。
[0144]
现在参考图7,根据一些实施例,示出了用于确定对应于致动器操作的能量值的过程700的流程图。过程700可配置成针对致动器502的电源506的每个供电周期重复。为了确保致动器502在失去电源后返回到默认位置,计算致动器502返回到默认位置所消耗的能量大小。然后,使用计算出的消耗能量值确定所需最小运行电压。在一些实施例中,过程700用于计算在参考图6详细描述的过程600的步骤608中使用的能量值。过程700可由存储器532内的各种组件执行。在一些实施例中,过程700的一个或多个步骤由存储器532之外的组件执行。
[0145]
过程700示出为包含检查致动器是否被供电(步骤702)。如果处理器534在步骤702中确定致动器被供电,那么过程700示出为进行到跨超级电容器测量初始电压(步骤704)。初始电压(vi)可由bms控制器内的处理器(例如,处理器534)测量为与致动器502处于初始位置pi时跨超级电容器的电压相对应。例如,初始位置pi是在处理器534第一次接收到致动器502失去电源的信号时致动器502的位置。但是,如果在步骤702期间,处理器534确定致动器502没有被供电,那么过程700示出为进行到重复检查致动器502是否被供电(步骤702)。
[0146]
过程700示出为包含计算初始能量值(步骤706)。在一些实施例中,步骤706由存储器(例如,存储器532)内的能量模块510完成。在一些实施例中,能量模块510从电容模块508接收具有计算出的电容(c)和在步骤704中跨超级电容器(例如,电容器504)测得的初始电压(vi)的输入。初始能量值可通过存储在能量模块510中的等式确定。例如,用于计算初始能量值的等式可与参考图5详细描述的等式6相同。
[0147]
在一些实施例中,初始能量值通过跨致动器502的一个其它组件测量电压并计算所述组件的能耗来确定,而不是跨超级电容器测量初始电压(vi)。具体地说,可以测量和/或计算电阻器517、电机516或任一其它组件的能耗。例如,电机516的能耗可通过分流电阻器(例如,电阻器517)测量。基于电机516的能耗,致动器502的剩余组件的功耗可假定为常数值。
[0148]
过程700示出为包含检查致动器是否处于默认位置(步骤708)。如果处理器534在步骤708中确定致动器502不处于默认位置,那么过程700示出为进行到继续检查致动器502是否处于默认位置(步骤708)。但是,如果处理器534在步骤708中确定致动器502处于默认位置,那么过程700示出为进行到跨超级电容器测量最终电压(步骤710)。在一些实施例中,最终电压(vf)由处理器534测量为当致动器502处于最终位置(pf)时跨超级电容器(例如,电容器504)的电压的值。例如,最终位置是在致动器502返回到默认位置后致动器502的位置。
在各种实施例中,默认位置在致动器502的范围内(例如,致动器502处于完全延伸和完全缩回之间、在中间等等)。
[0149]
过程700示出为包含计算最终能量值(步骤712)。在一些实施例中,步骤712由存储器(例如,存储器532)内的能量模块510完成。在一些实施例中,能量模块510接收来自电容模块508的具有在过程600的步骤606中计算出的电容(c)的输入,以及来自存储器532的具有在步骤710中跨超级电容器(例如,电容器504)测得的最终电压(vf)的值的输入。最终能量值(wf)可通过存储在能量模块510中的等式确定。例如,用于确定最终能量值的等式可与参考图5详细描述的等式7相同。
[0150]
在一些实施例中,类似于在步骤706处计算初始电压,初始能量值通过跨致动器502的一个其它组件测量电压并计算所述组件的能耗来确定,而不是跨超级电容器测量最终电压(vf)。具体地说,可以测量和/或计算电阻器517、电机516或任一其它组件的能耗。例如,电机516的能耗可通过分流电阻器(例如,电阻器517)测量。基于电机516的能耗,致动器502的剩余组件的功耗可假定为常数值。
[0151]
在一些实施例中,初始电压和/或最终电压基于致动器502的总体能耗而确定。例如,致动器502的总能耗可如上文所描述的那样确定,或通过经由在电源506之前或之后的传感器507测量能耗来确定。换句话说,传感器507可用于确定能量致动器502的总共消耗量。
[0152]
过程700示出为包含使用初始和最终能量值计算能量值(步骤714)。在一些实施例中,步骤714同样由存储器内的能量模块510完成。使用分别在步骤706和712计算出的初始能量值(wi)和最终能量(wf)值,能量模块510可通过应用存储在非易失性存储器(例如,存储器532)中的等式来确定能量值(wr)。例如,用于确定能量值的使用初始和最终能量值两者的等式可与参考图5详细描述的等式8相同。在一些实施例中,初始能量值和最终能量值之间的差用于计算致动器(例如,致动器502)返回到其默认位置所消耗的能量大小。在其它实施例中,能量值wr通过获取从最终能量值减去初始能量值的绝对值来确定。
[0153]
如上文所描述,过程700可通过在致动器502处于不同位置时跨电容器504测量电压来执行。因此,过程700的某些部分可能需要电容器504的充电和放电。但是,在一些实施例中,过程700的特定步骤可以在不对电容器504放电的情况下通过使用电源506并根据本文所述的故障安全程序执行过程700和/或故障安全动作来执行。以此方式,可以维持电容器504的电量,并且可以通过减少为测试或确定故障安全的能量需求而对电容器504进行充电/放电的需要来延长电容器504的寿命。在其它实施例中,故障安全动作所需的能量可以是与致动器502的总行程有关和/或执行故障安全动作/行动所需要的时间的常数,而不是实施过程700。
[0154]
现在参考图8,根据一些实施例,示出了用于确定与故障安全装置相关联的参数的过程800的流程图。过程800可配置成针对致动器502的电源506的每个供电周期重复。另外或替代地,过程800可以预定间隔(例如,每个月等)重复。在一些实施例中,过程800的结果存储在存储器中以供后续使用(例如,用于计算致动器502的寿命趋势,等等)。在各种实施例中,过程800用于计算在过程900和1000中使用的值,如在下文详细描述。过程800可由存储器532内的各种组件执行。在一些实施例中,过程800的一个或多个步骤由存储器532之外的组件执行。
[0155]
过程800示出为包含测量将故障安全装置返回到故障安全位置所需要的能量大小(步骤810)。在一些实施例中,致动器502是故障安全装置。另外或替代地,故障安全装置可以是任何配置成在故障(例如,断电等)后返回到故障安全位置的装置。故障安全位置可以是故障安全装置移动范围内的特定位置。例如,线性致动器可能无法到达完全延伸和完全缩回之间的中间点。在一些实施例中,故障安全位置动态地确定(例如,响应于故障类型而确定,等等)。在一些实施例中,步骤810根据上文参考图5所公开的方法来执行。另外或替代地,步骤810可根据步骤812-816执行。
[0156]
在步骤812处,致动器502将故障安全装置定位在第一位置。例如,电机516可将驱动装置518驱动到极端位置(例如,完全延伸、完全缩回等)。在步骤814处,致动器502测量与将故障安全装置驱动到故障安全位置相关联的电流(i)和电压(v)。例如,电机516可将驱动装置518驱动到特定位置(例如,完全延伸和完全缩回之间的中间位置,等等),并测量相关联的电压和电流。在一些实施例中,能量模块510使用等式10和等式11计算(步骤816)将故障安全装置返回到故障安全位置所需要的能量大小:
[0157]
w=v*i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0158]
j=s*w*s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0159]
其中s是与将故障安全装置驱动到故障安全位置相关联的时间,j是所需要的能量大小,s是与等式1、2、8和9的安全因数可以相同也可以不相同的安全因数。在各种实施例中,所需要的能量大小(j)存储在存储器中以供后续使用。
[0160]
在步骤820处,致动器502测量电容器(例如,电容器504)的有效电容。在一些实施例中,步骤820根据上文参考图5所公开的方法来执行。另外或替代地,步骤820可根据步骤822-832执行。在步骤822处,将电容器(例如,电容器504)充至满电。在一些实施例中,电容器可被充电到不同电平(例如,一半电量等)。在步骤824处,电容模块508可测量电容器的第一电压。在步骤826处,通过已知负载(例如,固定电阻等)对电容器放电。在步骤828处,电容模块508可测量与放电相关联的电流。在步骤830处,电容模块508可测量电容器的第二电压。在步骤832处,电容模块832基于先前测得的值确定电容器的有效电容。在一些实施例中,电容模块508使用等式12和/或等式13经由时间常数(τ)计算电容器的有效电容:
[0161]vc
=s*v0*e
t/rc
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0162]
τ=s*rc
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0163]
其中vc是在时间t之后跨电容器的电压,v0是跨电容器的初始电压,r是已知电阻,τ是电路的对应于将电容器从初始电压零充电到所施加dc源的值的大致63.2%所需要的时间的时间常数(替代地,时间常数可对应于将电容器从满电放电到满电的36.8%所需要的时间),s是与等式1、2、8、9和11的安全因数可以相同也可以不相同的安全因数。
[0164]
现在参考图9a,根据一些实施例,示出了用于确定电容器寿命的过程900的流程图。过程900可配置成针对致动器502的电源506的每个供电周期重复。另外或替代地,过程900可以预定间隔(例如,每周等)重复。在一些实施例中,过程900的结果存储在存储器中(例如,用于计算致动器502的寿命趋势,等等)。在各种实施例中,过程900使用来自过程800的值。过程900可由存储器532内的各种组件执行。在一些实施例中,过程900的一个或多个步骤由存储器532之外的组件执行。在各种实施例中,过程900可确定电容器504的剩余运行周期,并发送运行周期的指示。运行周期对应于电容器504能够存储将故障安全装置返回到
故障安全位置所需要的能量大小的时间长度。这可允许楼宇维护员在有缺陷的故障安全装置/电容器变得不可用之前更换它们。此外,这可以减少和/或消除手动测试故障安全装置可操作性的需要,从而提高系统可靠性和正常运行时间,并减少维护开销。
[0165]
过程900示出为包含比较将故障安全装置返回到故障安全位置所需要的能量大小与电容器的有效电容以确定电容器寿命(步骤910)。在一些实施例中,步骤910如上文所描述的那样执行。另外或替代地,步骤910可包含执行步骤912-916中的任一个。在步骤912处,给定电容器(例如,电容器504)的有效电容,计算达到将故障安全装置返回到故障安全位置所需要的能量大小所需的充电电压。在一些实施例中,充电电压模块512使用上方的等式6执行步骤912。在步骤914处,比较充电电压与电容器的阈值电压和/或寿命参数。例如,在步骤912中确定的充电电压可与电容器的击穿电压比较。在步骤916处,基于比较,确定电容器寿命。在一些实施例中,步骤916包含分析保存的装置数据。例如,充电电压模块512可分析先前确定的充电电压随时间推移的变化,并根据关系的斜率确定电容器所需的充电电压超过可运行电平(例如,击穿电压等)的预测日期。
[0166]
过程900示出为包含基于电容器寿命的确定而发送电容器寿命的指示(步骤920)。在一些实施例中,指示发送到bms控制器366。另外或替代地,指示可发送给楼宇维护员。指示可显示致动器502的剩余使用寿命。在一些实施例中,指示可允许用户更改致动器502的操作。例如,用户可以选择减缓故障安全装置的驱动速度以延长装置寿命。
[0167]
在一些实施例中,指示包含与致动器502相关联的诊断。例如,指示可包含装置的有效电容随时间推移的曲线图。
[0168]
现在参考图9b,示出用于确定驱动故障安全装置的速度的过程902。类似于过程900,过程902包含步骤910。步骤910可包含步骤912-916,如上文参考图9a详细描述。过程902示出为包含基于确定电容器寿命而确定驱动故障安全装置的速度(步骤930)。在一些实施例中,步骤930包含提示用户输入。例如,致动器502可允许用户选择故障安全驱动速度/负载权衡,例如“如果在故障安全模式下全行程速度设置为120秒,那么致动器将驱动
‘
x’n-m负载至少5年;如果在故障安全模式下全行程速度设置为60秒,那么致动器将驱动
‘
x’n-m负载至少3年。”另外或替代地,驱动速度可以自动确定。例如,响应于确定故障安全装置剩余10%的寿命,致动器502可将致动器的速度降低至标称速度的一半。减小致动器的速度可延长装置寿命。
[0169]
现在参考图10,根据一些实施例,示出了用于确定对电容器(例如,电容器504)充电所需要的时间的过程1000的流程图。过程1000可配置成针对致动器502的电源506的每个供电周期重复。另外或替代地,过程1000可以预定间隔(例如,每天等)重复。在一些实施例中,过程1000的结果存储在存储器中以供后续使用。在各种实施例中,过程1000使用来自过程800的测得值。过程1000可由存储器532内的各种组件执行。
[0170]
在一些实施例中,过程1000的一个或多个步骤由存储器532之外的组件执行。
[0171]
过程1000示出为包含比较能量大小与有效电容以确定对电容器充电所需要的时间(步骤1010)。在一些实施例中,充电电压模块512使用等式13计算对电容器充电所需要的时间量(例如,通过使时间常数乘以5)。在一些实施例中,步骤1010包含步骤1012-1016。在步骤1012处,确定与将故障安全装置返回到故障安全位置所需要的能量大小相关联的有效电阻。在一些实施例中,使用步骤810的值确定步骤1012。在步骤1014处,确定与电容器相关
联的时间常数(例如,使用等式13等)。在步骤1016处,基于时间常数,计算对电容器充电所需要的时间(例如,通过使时间常数τ乘以5)。
[0172]
过程1000示出为包含基于所确定的对电容器充电所需要的时间,发送对电容器充电所需要的时间的指示(步骤1020)。在一些实施例中,指示发送到bms控制器366。另外或替代地,指示可发送给楼宇维护员。在一些实施例中,指示可指示电容器504和/或故障安全装置(例如,致动器502)需要更换。在一些实施例中,可以发送另一寿命参数。寿命参数可包含:电容器的估计寿命(例如,如参考图9a所论述)、对电容器充电所需要的时间,和/或与电容器相关联的诊断结果(例如,测试电容器504供应将故障安全装置返回到故障安全位置所需要的电力的能力,如上文参考图5所论述)。在一些实施例中,寿命参数可包含或者可以是经由等式5计算出的剩余寿命(rl)比。剩余寿命比可提供电容器504可能衰退的指示,并且因此进行发送作为过程1000的一部分。
[0173]
现在参考图11,根据一些实施例,示出了用于对电容器504充电的升压-降压转换器515的图。确切地说,图11示出升压-降压转换器515内配置成使输入电压(例如,由电源506或外部源提供)步升或步降的多个组件,包含二极管、mosfet、电阻器、电容器、晶体管等。如上文所描述,此升压-降压拓扑可配置成对电容器504充电或将其耗尽。具体地说,可以形成第一配置,用于将输入电压步降以对电容器504充电,同时可以形成第二配置,用于将电容器504的电压输出步升以向处理电路536和致动器502的其它组件提供能量。
[0174]
同样如上文所描述,升压-降压转换器515可包含在电压调节器514和/或电源506中,或者可以是位于电容器504和一个或多个不同其它组件之间的单独组件。具体地说,流入或流出电容器504的所有信号或能量可通过升压-降压转换器515,根据配置进行步升或步降。例如,当出于故障安全对电容器504充电时,升压-降压转换器515可将电容器504的输入电压步降,以进行缓慢且受控的充电。当电容器504配置为电源时,升压-降压转换器515可将电压步升以向致动器502的各种组件(例如,处理电路536、电机516等)供电。在一些实施例中,各种配置由处理电路536或致动器502的另一处理电路或控制器(未示出)选择或控制。
[0175]
示例性实施例的配置
[0176]
在各种示例性实施例中所示的系统和方法的构造和布置仅为说明性的。尽管在本公开中仅详细描述若干实施例,但许多修改是可能的(例如,各种元件的大小、尺寸、结构、形状和比例的变化、参数值、安装布置、材料使用、颜色、定向等)。例如,元件的位置可以颠倒或以其它方式变化,且离散元件或位置的性质或数目可以更改或变化。因此,所有此类修改旨在被包含在本公开的范围内。任何过程或方法步骤的次序或顺序可根据替代实施例变化或再定序。可在不脱离本公开的范围的情况下对示例性实施例的设计、操作条件和布置作出其它替代、修改、改变和省略。
[0177]
本公开涵盖用于实现各种操作的方法、系统和在任何机器可读媒体上的程序产品。本公开的实施例的实施可以使用现有计算机处理器,或通过为这一目的或另一目的并入的针对适当系统的专用计算机处理器,或通过硬接线系统。本公开的范围内的实施例包含程序产品,包括用于携载或在其上存储机器可执行指令或数据结构的机器可读媒体。此类机器可读媒体可以是任何可用媒体,可由通用或专用计算机或具有处理器的其它机器访问。举例来说,此类机器可读媒体可包括ram、rom、eprom、eeprom、cd-rom或其它光盘存储装
置、磁盘存储装置或其它磁性存储装置,或可用于以机器可执行指令或数据结构的形式携载或存储所需程序代码且可由通用或专用计算机或具有处理器的其它机器访问的任何其它媒体。以上各项的组合也包含在机器可读媒体的范围内。机器可执行指令包含例如使通用计算机、专用计算机或专用处理机器执行某一功能或功能群组的指令和数据。
[0178]
尽管图式示出了方法步骤的特定次序,但步骤的次序可不同于所描绘的次序。并且,可以同时或部分同时地执行两个或更多个步骤。此类变化将取决于所选择的软件和硬件系统以及设计者选择。所有此类变化皆在本公开的范围内。同样,可以利用具有基于规则的逻辑和用于实现各种连接步骤、处理步骤、比较步骤和决策步骤的其它逻辑的标准编程技术来实现软件实施方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1