低频振荡主导模式识别方法、系统及存储介质与流程
1.本发明属于电力系统自动化技术领域,特别涉及一种低频振荡主导模式识别方法、系统及存储介质。
背景技术:
2.低频振荡是指互联电力系统受到扰动时,并列运行的不同发电机组间转子的相对摆动,使得系统功率或功角等出现振荡的现象,振荡频率一般在0.1~2.5hz 之间。随着互联电网的规模不断扩大、快速励磁系统的大量应用以及线路负荷不断的增加,导致电网发生低频振荡的概率越来越大。低频振荡已成为制约电网安全稳定运行的重要因素之一,若不能正确掌握低频振荡相关信息,及时采取相应措施,可能会引起互联系统出现解列,甚至大停电事故。
3.电力系统低频振荡的常用分析方法是prony算法,prony是一种“全局”算法,是用一组指数项的线性组合来拟合等间距的采样数据,从而获得低频振荡信号的幅值、频率、相位和阻尼比,但prony算法对噪声极其敏感,噪声会对参数辨识的精度产生一定的影响,特别是阻尼比的精度,从而影响调度人员对系统振荡风险的判别。
技术实现要素:
4.发明目的:本发明的目的是提出一种低频振荡主导模式识别方法,可以提高低频振荡主导模式参数的辨识精度,降低噪声影响。
5.本发明的另一目的是提出一种可以实施上述识别方法的低频振荡主导模式识别系统,以及存储有该识别方法的计算机程序的存储介质。
6.技术方案:本发明所述的低频振荡主导模式识别方法,包括如下步骤:
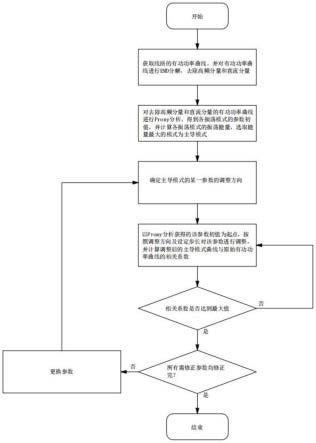
7.s1:获取线路的有功功率曲线,并对有功功率曲线进行emd分解,去除高频分量和直流分量;
8.s2:对去除高频分量和直流分量的有功功率曲线进行prony分析,得到各振荡模式的参数初值,并计算各振荡模式的振荡能量,选取能量最大的模式为主导模式;
9.s3:确定主导模式的某一参数的调整方向;
10.s4:以prony分析获得的该参数初值为起点,按照调整方向及设定步长对该参数进行调整,并计算调整后的主导模式曲线与原始有功功率曲线的相关系数;
11.s5:重复步骤s4,直至调整后的主导模式曲线与原始有功功率曲线的相关系数达到最大值;
12.s6:更换参数,重复步骤s3至s5,直至修正完所有需要修正的参数。
13.进一步的,所述步骤s3中的参数包括相位及阻尼比。
14.进一步的,所述步骤s1包括:
15.s1.1:获取线路的有功功率曲线,并对有功功率曲线进行emd分解,获得m 个imf分量和一个残余分量;
16.s1.2:计算m个imf分量的振荡频率,将振荡频率在低频阈值范围内的imf 分量相加,获得去除高频分量和直流分量的有功功率曲线。
17.进一步的,所述步骤s3包括:
18.s3.1:计算未调整的主导模式曲线与原始有功功率曲线的相关系数ρ1;
19.s3.2:对选定参数的初值增大一个设定步长,计算调整后的主导模式曲线与原始有功功率曲线的相关系数ρ
1+
;
20.s3.3:计算ρ
1+-ρ1,若差值大于0,则调整方向为增大;若差值小于0,则调整方向为减小。
21.进一步的,调整后的主导模式曲线与原始有功功率曲线的相关系数ρ由下式计算获得:
[0022][0023]
式中,n为曲线的采样点数;mi、ni分别为原始有功功率曲线与主导模式曲线第i点的值;μm、μn分别为原始有功功率曲线与主导模式曲线的均值;σm、σn分别为原始有功功率曲线与主导模式曲线的标准差。
[0024]
进一步的,所述低频阈值范围为0.1-2.5hz。
[0025]
进一步的,所述步骤s2中,第j个振荡模式的振荡能量ej由下式计算获得:
[0026][0027]
式中:n为第j个振荡模式的采样点数;ai为第i个采样点的拟合值;δt为第j个振荡模式的采样时间。
[0028]
本发明所述的低频振荡主导模式识别方法,包括:分解模块:用于对线路的有功功率曲线进行emd分解,去除高频分量和直流分量;初步分析模块:用于采用prony分析,获得去除高频分量和直流分量的有功功率曲线的主导模式的参数初值;修正模块,用于对主导模式的参数初值进行调整,并计算调整后的主导模式曲线与原始有功功率曲线的相关系数,以相关系数达到最大值时的参数值为低频振荡主导模式的确定参数值。
[0029]
本发明所述的存储介质,存储有计算机程序,其特征在于,所述计算机程序被设置为执行时实现上述低频振荡主导模式识别方法。
[0030]
有益效果:与现有技术相比,本发明具有如下优点:通过对prony方法辨识的主导模式参数按照一定步长进行调整,并通过计算调整后的主导模式曲线与原始的有功功率曲线的相关系数,并以相关系数最大时的参数值作为最后主导模式的确定参数,提高识别获得的低频振荡信息的精确度,去除噪声对辨识精度带来的影响。
附图说明
[0031]
图1为本发明第一实施例的低频振荡主导模式识别方法的流程图;
[0032]
图2为本发明第二实施例的低频振荡主导模式识别方法的流程图。
具体实施方式
[0033]
下面结合附图对本发明的技术方案作进一步说明。
[0034]
参照图1,根据本发明实施例的低频振荡主导模式识别方法,包括如下步骤:
[0035]
s1:获取线路的有功功率曲线,并对有功功率曲线进行emd分解,去除高频分量和直流分量;
[0036]
s2:对去除高频分量和直流分量的有功功率曲线进行prony分析,得到各振荡模式的参数初值,并计算各振荡模式的振荡能量,选取能量最大的模式为主导模式;
[0037]
s3:确定主导模式的某一参数的调整方向;
[0038]
s4:以prony分析获得的该参数初值为起点,按照调整方向及设定步长对该参数进行调整,并计算调整后的主导模式曲线与原始有功功率曲线的相关系数;
[0039]
s5:重复步骤s4,直至调整后的主导模式曲线与原始有功功率曲线的相关系数达到最大值;
[0040]
s6:更换参数,重复步骤s3至s5,直至修正完所有需要修正的参数。
[0041]
上述技术方案,通过emd分解去除原始有功功率曲线中的高频分量及直流分量,去除了大量杂散分量,提高了prony分析的准确性。同时在基于prony分析结果的参数初值上,对参数初值按照设定步进值进行调整,并计算调整后的主导模式曲线与原始有功功率曲线的相关系数,确定调整方向是否正确,当相关系数达到最大值时,调整后的参数最接近实际参数值。通过上述方法,对prony分析的结果进行进一步地修正,提高了低频振荡信号主导模式参数辨识的精确度,克服了prony算法对噪声敏感的缺陷,提高了调度人员对系统振荡风险判别的准确性。
[0042]
参照图2,实际中,prony分析出的主导模式的幅值和频率受噪声影响较小,可以认为与实际的幅值和频率值没有差异,所以一般仅对prony分析出的相位和阻尼比进行修正。
[0043]
主导模式曲线与原始有功功率曲线的相关系数ρ由下式计算获得:
[0044][0045]
式中,n为曲线的采样点数;mi、ni分别为原始有功功率曲线与主导模式曲线第i点的值;μm、μn分别为原始有功功率曲线与主导模式曲线各自的均值;σm、σn分别为原始有功功率曲线与主导模式曲线各自的标准差。
[0046]
当主导模式曲线与原始有功功率曲线的相关系数最大时,即可认为主导模式曲线可以最大程度反应原始有功功率曲线的振荡特性,所以修正时需要向相关系数变大的方向对prony分析出的参数进行修正。修正时先对待修正的参数的初值增加一个设定的步长,分别计算未调整的主导模式曲线与原始有功功率曲线的相关系数ρ1和调整后的主导模式曲线与原始有功功率曲线的相关系数ρ
1+
,并计算ρ
1+-ρ1,若差值大于0,则调整方向为增大;若差值小于0,则调整方向为减小。在本实施例中,相位的调整步长优选为0.1rad,阻尼比的调整步长优选为0.1%。
[0047]
实际中,步骤s1包括:
[0048]
s1.1:获取线路的有功功率曲线,并对有功功率曲线进行emd分解,获得m 个imf分量和一个残余分量;
[0049]
s1.2:计算m个imf分量的振荡频率,将振荡频率在低频阈值范围内的imf 分量相
加,获得去除高频分量和直流分量的有功功率曲线。
[0050]
其中低频阈值范围优选为0.1-2.5hz。
[0051]
在步骤s2中,第j个振荡模式的振荡能量ej由下式计算获得:
[0052][0053]
式中:n为第j个振荡模式的采样点数;ai为第i个采样点的拟合值;δt为第j个振荡模式的采样时间。
[0054]
由于在步骤s3中已经确定了需要修正的参数的正确修正方向,所以当第i 次修正的主导模式曲线与原始曲线的相关系数与第i-1次修正后计算获得的相关系数的差值ρ
i-ρ
i-1
≤0时,即意味着再向确定的调整方向对该参数进行修正,相关系数开始减小,第i-1次修正后的参数即为最接近真实值的参数,为更加精确反应系统低频振荡参数。
[0055]
本发明实施例的低频振荡主导模式识别系统,包括分解模块、初步分析模块及修正模块。其中分解模块用于对线路的有功功率曲线进行emd分解,去除高频分量和直流分量;初步分析模块用于采用prony分析,获得去除高频分量和直流分量的有功功率曲线的主导模式的参数初值;修正模块用于对主导模式的参数初值进行调整,并计算调整后的主导模式曲线与原始有功功率曲线的相关系数,以相关系数达到最大值时的参数值为低频振荡主导模式的确定参数值。本发明实施例的存储介质,存储有上述低频振荡主导模式识别方法实例化的计算机程序。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1