一种电动汽车充电机谐波抑制方法
1.本发明涉及电力电子技术、控制科学和技术的交叉研究,属于智能控制领域新技术的基础研究和应用探索。尤其是涉及一种充电机谐波抑制控制方法。
背景技术:
2.随着能源危机和环境污染的加剧,如何高效、清洁地利用能源并达到环保的目的,关系着国家的国计民生和可持续发展。电动汽车作为新能源汽车是汽车工业发展的重要方向之一,并得到我国政府的大力支持和重视。当前pwm整流器+dc/dc变换器的结构形式因主动抑制谐波是纯电动汽车充电机结构形式的主要发展趋势,而pwm整流器的开关器件开关频率约为2~ 20khz,工作时会也产生开关频率整数倍的谐波,该谐波进入电网后会影响电网上对电磁干扰敏感的负载,也会产生附加损耗。为了减小充电站中充电机的网侧电流总谐波含量(totalharmonic distortion,thd),降低充电机在充电过程中谐波电流对智能电网的污染,充电机谐波抑制方法被越来越多的学者关注和研究。
3.充电机网侧电流的谐波主要集中在低频段和高频段。低频谐波主要有两种:一种是电流谐波,它是由整流器脉宽调制(pulse width modulation,pwm)技术的死区产生的电压谐波,经过低通滤波器的滤波电感产生的;另一种是电网的背景谐波,这种谐波主要是由于接入电网的非线性负载造成。而高频谐波主要集中在开关频率处,由于超出控制器带宽,因此多采用l 型或lcl型低通滤波器消除。针对充电机网侧电流的低频谐波,比例积分(proportionalintegral,pi)控制、比例谐振(proportional resonance,pr)控制和重复(repetitivecontrol,rc)控制是pwm整流器网侧电流常见的控制方法。pi控制因理论成熟、设计方法简单,但该方法不能实现交流量的无差跟踪,比如有学者采用pi控制,抑制pwm整流器起动瞬间交流侧电流的冲击,并提出一种通过施加恒定扰动来抑制起动瞬间网侧电流冲击的方法,并通过简单的计算,利用q轴电流给定不为零的方法来校正整流器的功率因数,但网侧电流跟踪能力较差;另有学者提出采用pwm整流模式电流内环准pr控制,该控制策略简化了控制系统,克服了pi控制的缺点,但单个pr控制器仅能针对某一次谐波进行抑制,而无法对其他次谐波起作用。
4.对于电压型pwm整流器很多学者采用矢量控制,或者在原有的矢量控制基础上增加了阻尼作用来消除高次谐波,或者采用基于矢量控制的无阻尼控制策略。有文献中应用于电动汽车充电机中pwm整流器采用了电流内环准比例谐振(pr)控制策略,仿真结果表明能很好地控制 pwm整流器网侧电流,且具有很好的稳态和动态特性。孙蔚博士和刘鑫龙硕士将内模控制应用于lcl滤波的pwm整流器中,使控制系统具有很高的鲁棒性,但难点是难以选取系统的理想滑模切换相平面,并且数字实现时,系统有限的采样频率会使控制效果受到限制。为了减小 lcl滤波器引入的一对谐振极点破坏系统的稳定性带来的危害,常常采取的措施有无源阻尼和有源阻尼法。为提高pwm整流器的性能,pwm整流器直接功率控制(dpc)也被国内外学者广泛采用,针对直接功率控制每次只输出一个非零电压矢量,容易导致功率脉动的问题,有学者提出了在一个开关周期内具有双非零电压矢量输出的三电平
pwm整流器dpc算法,也有学者采用三电平空间矢量脉宽调制(svpwm)算法,结合比例积分谐振控制器有效解决了三电平充电机拓扑结构系统中5、7次谐波,控制效果良好。
5.虽然国内外对电动汽车充电站谐波分析和抑制的研究也取得了一系列的成果,仍然面临着许多亟待解决的问题,电动汽车充电站的设计、建设尚不成熟,国内外电动汽车充电站的相关技术标准尚不健全等因素都制约着电动汽车产业化的发展。在基础理论方面和工程应用方面存在的主要问题如下:(1)目前对电动汽车充电站谐波特性分析及谐波对电网的影响研究比较充分,但对充电站谐波抑制措施和理想控制策略尚无定论,大多停留在仿真分析、模型建立和初步探索阶段;(2)对应用于电动汽车充电站中的三相电压型lcl结构的pwm整流器,pwm 整流器的控制效果直接影响电动汽车充电机中的谐波抑制情况及电网的功率因数,rc (repetitive control)算法是基于内模原理的一种控制理论,具有算法简单、易于实现、稳态控制精度高、控制性能对参数不敏感等优点,被广泛应用于并网电压型逆变器控制、有源滤波器(apf)等,目前,把重复控制理论应用于电动汽车充电机谐波抑制中的应用研究尚不是很多,尚没有有效的充电机谐波抑制方法提出并进行推广应用。
6.中国发明专利申请(cn202110294160.1)公开了一种基于复合控制的充电机输出电压谐波抑制方法及系统,所述方法包括以下步骤:判断充电机预充电后是否满足软起要求,若是则进入软起;所述充电机软起结束后,判断是否满足运行要求,若是则判断所述充电机的运行状态;根据所述运行状态运行pi控制;判断复合控制标志位是否为1,若是则切换复合控制器进行复合控制,若否则继续运行所述pi控制。通过本技术,基于准比例谐振与重复控制抑制充电机输出电压、电流低频纹波,实现对输出电压、电流的控制和周期性电压、电流纹波的抑制。该发明是针对充电机输出电压、电流实现的控制和纹波抑制,对充电机输入电流,既是和电网连接处的网侧电流没有实现控制和谐波抑制处理。
技术实现要素:
7.本发明针对现有技术不足,提出一种基于改进重复控制的电动汽车充电机谐波抑制方法。采用rc加pi的电流复合控制方法,建立了充电机pirc(proportional integralrepetitivecontrol)控制器,并对该新型复合重复控制系统的稳定性、静态无差判据、参数设计方法进行了设计,可以很好的抑制pwm整流充电机电网侧电流谐波,降低网侧电流的谐波含量,增大电动汽车充电机控制系统的开环增益,进一步提高充电机谐波抑制的能力。仿真及实验结果表明该方法能有效地降低网侧电流的thd,且系统具有良好的动态特性。
8.本发明采用的技术方案:
9.一种电动汽车充电机谐波抑制方法,应用重复控制方案实现电动汽车充电机的谐波抑制,包括如下步骤:
10.1)构建前置lcl型滤波器单相pwm整流方式的充电机拓扑结构形式;
11.2)建立单相pwm整流充电机数学模型;
12.3)分析电动汽车充电机模型中谐波特性;
13.4)分析了基于pi电流调节器的谐波抑制方法,建立了充电机系统pi控制结构;
14.5)采用rc加pi的电流复合控制方法,建立pwm整流充电机pirc复合重复控制器,优化 pwm的占空比抑制低次谐波的产生,应用到充电机电网侧电流谐波抑制中。
15.重复控制虽然可以在基波及基波的整数次频率处提供高增益,实现无差跟踪多个正弦信号,但动态响应较慢,而比例积分(pi)控制器为经典控制器,动态响应快,二者结合构成的复合控制器将可以兼顾稳态性能和动态性能。为了既能保持重复控制器特有的优点,又能克服其本身动态性能差的缺点,本发明采用稳态性能好的rc控制级联动态性能好的pi控制,构成pirc(proportionalintegralrepetitivecontrol,pirc)控制器。
16.发明有益效果:
17.1、本发明电动汽车充电机谐波抑制方法,研究了重复控制方案在充电机谐波抑制中的应用,结合普通重复控制器的特点,分析了传统pi控制存在的问题,提出一种采用rc加pi的电流复合控制方法,采用传统重复控制器级联比例(p)环节,建立了充电机pirc(proportionalintegralrepetitivecontrol)复合重复控制器,优化pwm的占空比抑制低次谐波的产生,应用到充电机网侧电流谐波抑制中。
18.2、本发明电动汽车充电机谐波抑制方法,采用pirc控制方法应用到pwm整流充电机网侧电流谐波抑制中能提高充电机系统稳态和动态性能,并能有效抑制充电机网侧电流中的奇次谐波,实现充电机网侧电流的无静差跟踪,对电动汽车的普及应用有一定的推动作用。
19.3、本发明电动汽车充电机谐波抑制方法,进一步的通过对该新型复合重复控制系统的稳定性、静态无差判据、参数设计方法进行了设计,仿真及实验结果表明该方法能有效地降低网侧电流的thd,且系统具有良好的动态特性。重复控制(rc,repetitivecontrol)作为基于内模原理的波形控制技术,可以有效抑制周期扰动的影响,广泛应用于电网逆变器控制和有源滤波领域。重复控制虽然可以在基波及基波的整数次频率处提供高增益,实现无差跟踪多个正弦信号,但动态响应较慢,而比例积分(pi)控制器为经典控制器,动态响应快,二者结合构成的复合控制器将可以兼顾稳态性能和动态性能,既能保持重复控制器特有的优点,又能克服其本身动态性能差的缺点。
附图说明
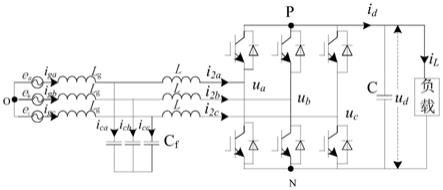
20.图1所示为三相电压型lcl结构pwm整流充电机拓扑结构图;
21.图2为三相桥式不控整流充电机谐波变化规律;
22.图3为充电机系统pi控制结构图;
23.图4为充电机pirc控制系统结构图;
24.图5pirc控制系统的开环bode图;
25.图6为不同的控制方案对应的网侧电流谐波含量频谱分析,充电机电网侧电流谐波频谱分析;其中(a)为采用pi控制方案,(b)为采用pirc控制方案;
26.图7充电机电网侧电流跟踪波形仿真分析;其中(a)为采用pi控制方案,(b)为采用pirc控制方案;
27.图8是采用pi控制方案入网电流实验测试波形及谐波频谱分析;
28.图9是采用pirc控制方案入网电流实验测试波形及谐波频谱分析,可知,采用pirc控制当重复控制增益k
rc
=0.3时,thd从传统pi控制的7.43%下降到2.79%。
具体实施方式
29.为了使发明创造实现其发明目的的技术构思及优点更加清楚明白,下面结合附图对本发明的技术方案作进一步的详细描述。应当理解的是,以下各实施例仅用以解释和说明本发明的优选实施方式,不应当构成对本发明要求专利保护的范围的限定。
30.实施例1
31.参见图1-图5,本发明电动汽车充电机谐波抑制方法,应用重复控制方案实现电动汽车充电机的谐波抑制,包括如下步骤:
32.1)构建前置lcl型滤波器单相pwm整流方式的充电机拓扑结构形式,如图1所示,与相控整流器相比,基于pwm整流结构的充电机具有谐波抑制效果好、功率因数高等优点;
33.2)建立单相pwm整流充电机数学模型;
34.3)分析电动汽车充电机模型中谐波特性;
35.对于现阶段广泛采用的三相不可控桥式6脉动整流充电机,以网侧电流a相为例,进行傅里叶分解,其中ω为电流角频率,i1为基波电流有效值,in为谐波电流有效值。
[0036][0037]
对于三相桥式不控整流充电机,其谐波电流次数主要是5次、7次、11次、13次等;谐波电流大小与谐波次数成反比,谐波的次数越大,谐波电流值越小。并且在充电机一个充电周期内,谐波的幅值随着充电时间发生变化,其变化规律如图2所示。
[0038]
4)分析了基于pi电流调节器的谐波抑制方法,建立了充电机系统pi控制结构;
[0039]
对于单相pwm整流充电机,充电机网侧电流的闭环控制系统一般采用pi调节器,pi 调节器对于系统截止频率wc以下的各次谐波有一定的抑制作用,并且因其简单有效经常被用于充电机网侧电流控制。
[0040]
5)采用rc加pi的电流复合控制方法,提出复合重复控制电动汽车充电机谐波抑制方案,建立pwm整流充电机pirc复合重复控制器,优化pwm的占空比抑制低次谐波的产生,应用到充电机网侧电流谐波抑制中。
[0041]
重复控制虽然可以在基波及基波的整数次频率处提供高增益,实现无差跟踪多个正弦信号,但动态响应较慢,而比例积分(pi)控制器为经典控制器,动态响应快,二者结合构成的复合控制器将可以兼顾稳态性能和动态性能。为了既能保持重复控制器特有的优点,又能克服其本身动态性能差的缺点,本发明采用稳态性能好的rc控制级联动态性能好的pi控制,构成 pirc(proportional integral repetitive control,pirc)控制器,其结构图如图3所示。
[0042]
采用pi控制和采用pirc控制,系统的开环bode图如图5所示,其中g
lcl
(e
jω
)为pwm
整流充电机开环传递函数;g
pi
(e
jω
)*g
lcl
(e
jω
)为pi控制系统开环传递函数;g
pirc
(e
jω
)*g
lcl
(e
jω
) 为pirc控制系统开环传递函数,开环传递函数如公式4所示。
[0043][0044]
实施例2
[0045]
参见图1-图6,本实施例的电动汽车充电机谐波抑制实现方法,包括如下步骤:
[0046]
a.构建前置lcl型滤波器单相pwm整流方式的充电机拓扑结构形式;
[0047]
如图1:lcl结构pwm整流充电机拓扑图所示:ea,eb,ec为电网三相电源电压,电网侧电感和整流器侧电感分别为lg,l,直流侧电流和负载电流分别为id和i
l
,ud为直流侧电压,c为直流侧滤波电容,cf为交流侧滤波电容,六个igbt组成三相桥式整流电路。与相控整流器相比,基于pwm整流结构的充电机具有谐波抑制效果好、功率因数高等优点。
[0048]
b.建立单相pwm整流充电机数学模型;
[0049]
以单相pwm整流充电机为例,忽略电感内阻,由于lcl系统中存在谐振极点而不稳定,若采用无源阻尼抑制,设交流侧滤波电容cf上串联三相电阻rc,可得出lcl结构的pwm整流充电机中网侧电流ig与整流器控制电压u传递函数为:
[0050][0051]
c.分析电动汽车充电机模型中谐波特性
[0052]
对于现阶段广泛采用的三相不可控桥式6脉动整流充电机,以网侧电流a相为例,进行傅里叶分解,其中ω为电流角频率,i1为基波电流有效值,in为谐波电流有效值。
[0053][0054]
对于三相桥式不控整流充电机,其谐波电流次数主要是5次、7次、11次、13次等;谐波电流大小与谐波次数成反比,谐波的次数越大,谐波电流值越小。并且在充电机一个充电周期内,谐波的幅值随着充电时间发生变化,其变化规律如图2所示。
[0055]
d.通过分析基于pi电流调节器的谐波抑制方法,建立如图3所示的充电机系统pi控制结构图。对于单相pwm整流充电机,充电机网侧电流的闭环控制系统一般采用pi调节
器, pi调节器对于系统截止频率wc以下的各次谐波有一定的抑制作用,并且因其简单有效经常被用于充电机网侧电流控制。
[0056]
充电机系统pi控制结构图如图3所示,其中g
lcl
(s)为网侧电流ig(s)与整流器控制电压u(s)的传递函数,g
pi
(s)为pi控制器传递函数,i
ref
为参考电流,ug为电网电压,ig为电网电流,e(s)为误差信号。
[0057]
e.提出复合重复控制电动汽车充电机谐波抑制方案,建立pwm整流充电机pirc控制器。
[0058]
重复控制(rc,repetitive control)作为基于内模原理的波形控制技术,可以有效抑制周期扰动的影响,广泛应用于电网逆变器控制和有源滤波领域。重复控制虽然可以在基波及基波的整数次频率处提供高增益,实现无差跟踪多个正弦信号,但动态响应较慢,而比例积分(pi) 控制器为经典控制器,动态响应快,二者结合构成的复合控制器将可以兼顾稳态性能和动态性能。为了既能保持重复控制器特有的优点,又能克服其本身动态性能差的缺点,本发明采用稳态性能好的rc控制级联动态性能好的pi控制,构成pirc(proportional integral repetitivecontrol,pirc)控制器,其结构图如图4所示,电动汽车充电机pirc控制系统结构图中, g
rc
为重复控制器,i
ref
为电流参考输入信号,g
pi
为pi控制器e(s)为误差信号,u(s)为复合控制器输出信号,ug为扰动输入电压信号,g
lcl
为pwm整流充电机传递函数,ig充电机网侧电流,是系统输出信号。
[0059]
考虑补偿情况下,重复控制器的离散传递函数形式为:
[0060][0061]
q为小于1的内模系数,用于改善系统的稳定性和鲁棒性,k
rc
是重复控制增益,n为每个周期内的采样点数,等于采样频率与参考信号频率的比值;zm为相位超前补偿器;s(z)为补偿函数,本设计选用二阶低通滤波器。本实施例,取q=0.95;重复控制增益k
rc
=0.5;取采样频率为10khz,参考信号频率的50hz,则n=200;zm为相位超前补偿器,取m=5;s(z)为补偿函数,选用二阶低通滤波器,取比例积分系数k
p
=18,ki=14000,可以分别得到系统:
[0062]glcl
(e
jω
)、g
pi
(e
jω
)*g
lcl
(e
jω
)、g
pirc
(e
jω
)*g
lcl
(e
jω
)的开环伯德图。
[0063]
采用pi控制和采用pirc控制,系统的开环bode图如图5所示,其中g
lcl
(e
jω
)为pwm整流充电机开环传递函数;g
pi
(e
jω
)*g
lcl
(e
jω
)为pi控制系统开环传递函数;g
pirc
(e
jω
)*g
lcl
(e
jω
) 为pirc控制系统开环传递函数,开环传递函数如公式4所示:
[0064][0065]
如图5所示的开环伯德图可知,pirc控制相比pi控制,系统能够在谐波频率处提供较高增益,如在50nhz(n=1,2,...)频率处,从而可以抑制电动汽车充电机网侧电流这些频率处的谐波,进一步减小充电机控制系统的稳态误差。
[0066]
对pwm整流充电机pirc控制方案进行仿真分析和实验验证
[0067]
以本实施例为例,为了验证pirc分析的正确性,在matlab/simulink环境下搭建单
相pwm 整流充电机仿真模型,分别对pirc控制方法和pi控制进行了仿真,pwm整流充电机网侧电感、整流器侧电感、无源阻尼电阻的参数设置与上述相同,其余参数设置如下表1所示所示。
[0068]
表1 pwm整流充电机仿真参数
[0069][0070]
图6为不同的控制方案对应的网侧电流谐波含量频谱分析。如图6所示,采用pirc控制方案网侧电流3次、5次、7次、11次等奇次谐波明显减小,谐波电流总畸变率thd从传统pi 控制的3.58%下降到1.15%,且具有更好的网侧电流跟踪能力。
[0071]
图7:充电机电网侧电流跟踪波形仿真分析;其中(a)为采用pi控制方案,(b)为采用pirc控制方案;图8是采用pi控制方案入网电流实验测试波形及谐波频谱分析;图9是采用pirc控制方案入网电流实验测试波形及谐波频谱分析,可知,采用pirc控制当重复控制增益k
rc
=0.3时,thd从传统pi控制的7.43%下降到2.79%。
[0072]
本发明结合普通重复控制器的特点,分析了传统pi控制存在的问题,研究了重复控制方案在充电机谐波抑制中的应用,采用传统重复控制器级联比例积分(pi)控制,设计了pirc 复合重复控制器,优化pwm的占空比抑制低次谐波的产生,应用到充电机网侧电流谐波抑制中。本发明采用pirc控制方法应用到pwm整流充电机网侧电流谐波抑制中能提高充电机系统稳态和动态性能,并能有效抑制充电机网侧电流中的奇次谐波,实现充电机网侧电流的无静差跟踪,对电动汽车的普及应用有一定的推动作用,并且该控制方案能推广应用到单相、三相pwm整流领域以及光伏发电逆变器控制领域等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1