一种基于实时操作的定速电机控制方法与流程
一种基于实时操作的定速电机控制方法
【技术领域】
1.本发明涉及定速电机控制技术领域,尤其是一种基于实时操作的定速电机控制方法。
背景技术:
2.电机就是将电能与机械能相互转换的一种电力设备,市场上多分为定速电机和变速电机。调速电机适合用于转速需要来回调整的场合,一般需要安装调速器,通过调速器进行简单调速;定速电机一般是按恒频恒压设计、不能调速的电机,定速电机正常运行时,按固定速度恒定运行,且不可调速,仅可正转、反转、启停和不带任何反馈。
3.定速电机工作时,采用变频器供电,在较低的频率和电压下以无冲击电流的方式启动,并利用变频器所供的各种制动方式进行快速制动,便于实现频繁启动和制动。所以,现有定速电机的控制模式,决定了定速电机对其驱动的运动机构角度不能够进行动态控制。
4.因此,迫切需要一种控制模式,通过对定速电机驱动的执行机构进行角度检测,并根据实时变化的期望角度进行运动机构角度的动态运动控制。
技术实现要素:
5.本发明解决了传统定速电机的控制模式,提供一种单个动作分为多个阶段且每个阶段采用不同的运动控制算法,提高灵活性高和达到最优控制效果的基于实时操作的定速电机控制方法。
6.在执行机构中、根据实时变化的期望角度进行运动机构角度的动态运动控制,该定速电机控制方法具有以下优点:
7.(1)、灵活性高,可将单个动作控制细分为多个阶段,在每个阶段可以采用不同的运动控制算法,以达到最优的控制效果
8.为达到上述明目的,采用的技术方案如下:
9.一种基于实时操作的定速电机控制方法,用于无反馈的定速电机在执行机构中、根据实时变化的期望角度进行运动机构角度的动态运动控制,包括以下步骤:
10.步骤s1,开始:启动程序;
11.步骤s2,初始化实时内核:初始化微控单元的硬件内核和实时操作系统的系统内核;
12.步骤s3,初始化硬件设备:初始化控制过程中会使用到的外设接口;
13.步骤s4,标定初始位置角度:标定基准角度,以便于使用角度传感器作反馈;
14.步骤s5,获取定速电机的运动特性参数;
15.步骤s6,设置静态误差容忍:根据定速电机的运动特性参数和机械结构、以及微控单元算力因素,设定一个不会导致控制结果持续振荡、无法达到目标值或长时间无法达到目标值的误差容忍;
16.步骤s7,判断系统一切是否正常,当系统不正常时立即终止,当系统一切正常时,程序开始运行,并开始执行任务1、任务2和任务3,所述任务1是用于更新被控量,所述任务2则是其他琐碎的任务,所述任务3则是实际的运动控制程序,且每个任务都在空闲时间时才进行切换;
17.步骤s8,任务1:用户将“期望值”发送给微控单元,更新目标值;
18.步骤s9,任务2:反馈执行机构的实际值、通过角度传感器获取运动机构的角度值;
19.步骤s10,任务3:微控单元根据步骤s8进行处理数据信息的提取,获取目标值;
20.步骤s11,微控单元以特定的运动控制算法计算出可达到阶段性期望目标的控制流,即多组阶段性的控制量序列,获取阶段性的控制量序列组;
21.步骤s12,在实时操作系统的实时内核中,根据控制流和“角度值”以及电机运动特性参数动态、控制定速电机的运动方向和启停;
22.步骤s13,在没有新的期望值到来之前,运动控制目标值将朝“期望值”递进,依据多个控制量序列达成“期望值”;
23.步骤s14,在步骤s11至步骤s13的整个流程中,一旦有新的“期望值”到来,运动控制目标值会被立刻改变,且利用实时操作系统的实时特性,空闲期间会进行步骤s9的其他琐碎操作;
24.步骤s15,以上步骤循环往复。
25.进一步地,所述步骤s7至步骤s14中,在任务3中还包括:
26.步骤a、根据当前“目标值”和角度传感器的“角度值”计算出控制量序列,每个控制量都包含如电机转动时长、转动方向参数;
27.步骤b、一次目标变更需计算出若干组控制量序列,一组控制量序列包含若干个控制量;
28.步骤c、控制流预处理,每一组控制量序列看做一个运动阶段,对于不同阶段采用不同的控制量序列组,计算出阶段性的控制量序列组;
29.步骤d、对控制流预处理完毕以后,根据控制量进行定速电机的控制;
30.步骤e、在正常流程下,根据控制量设定好电机运动时间并启动硬件定时器,然后根据角度传感器反馈的角度与目标位置角度确定电机运动方向,接着准备处理下一个控制量;
31.步骤f、在硬件定时器未触发定时完成的中断前,依赖实时操作系统的多线程能力,利用空闲时间完成其他任务处理;
32.步骤g、当硬件定时被触发以后,在定时器中断中,停止定速电机转动,并标记当前控制量为已完成状态,退出中断,回到原来的程序位置;
33.步骤h、当一组序列的所有控制量已经执行完毕而没达到最终目标位置时,切换至下一组控制量序列进行控制,没有下一组序列则更新数据流,建立新的控制量序列组进行调整控制;
34.步骤i、若已达到最终目标位置,则可以保持当前角度,并准备更新数据流,等待用户新的“期望值”。
35.进一步地,所述步骤h中还包括:
36.步骤h1,根据当前控制量序列,执行当前控制量,判断是否已完成前导控制量或控
制流已更新,否则返回至步骤s7,是则依次进行运动时间设定、启动硬件定时、根据角度值确定定速电机正转或反转和下一个控制量;
37.步骤h2,判断是否完成所有控制量,否则重复步骤h1,
38.步骤h3,当完成所有控制量时,判断角度值是否处于误差容忍内,是则保持当前角度、并准备更新数据流;
39.步骤h4,当角度值未处于误差容忍内时,对最后一个控制量序列进行判断,符合要求则保持当前角度、并准备更新数据流;
40.步骤h5,当最后一个控制量序列未符合要求,则切换至下组控制量序列,重复步骤h1至步骤h4的操控。
41.进一步地,所述阶段性的控制量序列组的运动控制算法,适用于定速电机加速度未知的情况,该运动控制算法主要对控制量序列的方向元素和时间元素计算;
42.控制量序列的方向元素计算,如公式(1)所示:
[0043][0044]
其中,δa指目标角度与当前角度的差值;
[0045]
然后,计算电机单次转动角度aseq,如公式(2)所示:
[0046][0047]
其中,amin指定速电机单次启停的最小转动角度,n指该控制量序列元素的个数,且必须符合以下条件,如公式(3)所示:
[0048][0049]
控制量序列的时间元素计算,如公式(4)所示:
[0050][0051]
其中,kspd指步长比例系数,vmotor表示电机转动速度;
[0052]
最终,计算所得dseq和tseq就是定速电机对应的运动方向和运动时间参数。
[0053]
本发明的优点:
[0054]
本发明适用于无反馈的定速电机,即速度恒定、不可调速仅可正转或反转、启停且不带任何反馈的电动机,在执行机构中、根据实时变化的期望角度进行运动机构角度的动
态运动控制;定速电机实时操作对应的“实时操作系统”(rtos),如rt-thread、freertos该类拥有实时内核的嵌入式操作系统,该定速电机控制方法具有以下优点:
[0055]
(1)、灵活性高,可将单个动作控制细分为多个阶段,在每个阶段可以采用不同的运动控制算法,以达到最优的控制效果;
[0056]
(2)、实时性高,利用实时操作系统的实时内核以及硬件中断的快速响应;可保证系统的流畅性;
[0057]
(3)、精确度高,在机械误差范围内可保证定速电机带动结构达到目标位置;
[0058]
(4)、安全性高,根据定速电机的响应速度,合适的离散化的控制序列可保证稳定的时序控制。
[0059]
【说明书附图】
[0060]
图1为本发明对应的系统结构原理图;
[0061]
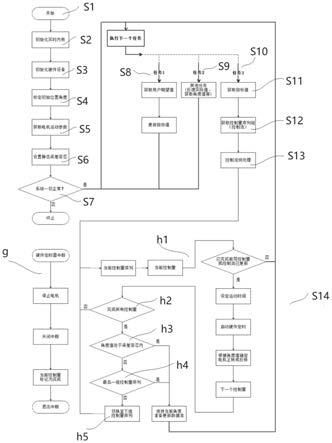
图2为本发明的流程控制图。
【具体实施方式】
[0062]
下面通过具体实例对本发明的内容作进一步的说明。
[0063]
一种基于实时操作的定速电机控制方法,如图1和图2所示,用于无反馈的定速电机1在执行机构2中、根据实时变化的期望角度进行运动机构角度的动态运动控制,该定速电机为速度恒定、不可调速仅可正转或反转、启停且不带任何反馈的电动机,该定速电机控制方法包括以下步骤:
[0064]
步骤s1,开始:启动程序;
[0065]
步骤s2,初始化实时内核:初始化微控单元mcu3的硬件内核和实时操作系统rtos4的系统内核;
[0066]
步骤s3,初始化硬件设备:初始化控制过程中会使用到的外设接口,如pwm、定时器、串口等;
[0067]
步骤s4,标定初始位置角度:利用机械开关或其他方式来标定基准角度,以便于使用角度传感器作反馈;
[0068]
步骤s5,获取定速电机的运动特性参数,由于每一个定速电机的运动特性参数可能不一样,会改变设定控制算法时的参数值,该运动特性参数包含启停时间、运动速度等;
[0069]
步骤s6,设置静态误差容忍:根据定速电机的运动特性参数和机械结构、以及微控单元算力等因素,设定一个不会导致控制结果持续振荡、无法达到目标值或长时间无法达到目标值的误差容忍;
[0070]
步骤s7,判断系统一切是否正常,当系统不正常时立即终止,当系统一切正常时,程序开始运行,并开始执行任务1、任务2和任务3,所述任务1是用于更新被控量,所述任务2则是其他琐碎的任务,所述任务3则是实际的运动控制程序,且每个任务都在空闲时间时才进行切换;
[0071]
步骤s8,任务1:用户将通过某种方式传输“期望值”发送给微控单元mcu,更新目标值,如串口传输的方式将“期望值”发送给微控单元mcu;
[0072]
步骤s9,任务2:反馈执行机构的实际值、通过角度传感器获取运动机构的角度值;
[0073]
步骤s10,任务3:微控单元mcu根据步骤s8进行处理数据信息的提取,获取目标值;
[0074]
步骤s11,微控单元mcu以特定的运动控制算法计算出可达到阶段性期望目标的控制流,即多组阶段性的控制量序列,获取阶段性的控制量序列组;其中,在多组控制量序列中,每个控制量序列又包含多个控制量,每个控制量可包含方向、时间等多个元素;
[0075]
其中,该阶段性的控制量序列组的运动控制算法,适用于定速电机加速度未知的情况,该运动控制算法主要对控制量序列的方向元素和时间元素计算;
[0076]
控制量序列的方向元素计算,如公式(1)所示:
[0077][0078]
其中,δa指目标角度与当前角度的差值;
[0079]
然后,计算电机单次旋转角度aseq,如公式(2)所示:
[0080][0081]
其中,amin指定速电机单次启停的最小转动角度,n指该控制量序列元素的个数,且必须符合以下条件,如公式(3)所示:
[0082][0083]
控制量序列的时间元素计算,如公式(4)所示:
[0084][0085]
其中,kspd指步长比例系数(,应小于1,以防止超调,具体数值应根据实际控制结构决定),vmotor表示电机转动速度(,对于定速电机来说,忽略启动停止过程,速度是可以看做恒定不变的,而启动停止过程的角度的不确定性已由amin过滤掉);
[0086]
最终,计算所得dseq和tseq就是定速电机对应的运动方向和运动时间参数。
[0087]
步骤s12,在实时操作系统rtos的实时内核中,根据控制流和“角度值”以及电机运动特性参数动态、控制定速电机的运动方向和启停;
[0088]
步骤s13,在没有新的期望值到来之前,运动控制目标值将朝“期望值”递进,依据多个控制量序列达成“期望值”;
[0089]
步骤s14,在步骤s11至步骤s13的整个流程中,一旦有新的“期望值”到来,运动控制目标值会被立刻改变,且利用实时操作系统rtos的实时特性,空闲期间会进行(“实际值”的反馈等)步骤s9的其他琐碎操作;
[0090]
步骤s15,以上步骤循环往复。
[0091]
其中,在步骤s7至步骤s14中,该任务3中还包括:
[0092]
步骤a、根据当前“目标值”和角度传感器的“角度值”计算出控制量序列,每个控制量都包含如电机转动时长、转动方向等参数;
[0093]
步骤b、一次目标变更需计算出若干组控制量序列,一组控制量序列包含若干个控制量;其中,控制效果的平滑性由序列的长度和开始时设置的静态误差容忍决定;序列越短,平滑性越好,反之可能越差;静态误差容忍范围越大,约束越小,平滑性越好,控制精度越低,反之亦然;
[0094]
步骤c、控制流预处理,对于控制流预处理,决定了电机运动控制流程的行进方式,该实施例中采用多阶段逼近的方式,每一组控制量序列看做一个运动阶段,对于不同阶段采用不同的控制量序列组,计算出阶段性的控制量序列组,以达到“因地制宜”的效果;
[0095]
步骤d、对控制流预处理完毕以后,根据控制量进行定速电机的控制;
[0096]
步骤e、在正常流程下,根据控制量设定好电机运动时间并启动硬件定时器,然后根据角度传感器反馈的角度与目标位置角度确定电机运动方向,接着准备处理下一个控制量;
[0097]
步骤f、在硬件定时器未触发定时完成的中断前,依赖实时操作系统rtos的多线程能力,利用空闲时间完成其他任务处理;
[0098]
步骤g、当硬件定时被触发以后,在定时器中断中,停止定速电机转动,并标记当前控制量为已完成状态,退出中断,回到原来的程序位置;
[0099]
步骤h、当一组序列的所有控制量已经执行完毕而没达到最终目标位置时,切换至下一组控制量序列进行控制,没有下一组序列则更新数据流,建立新的控制量序列组进行调整控制;
[0100]
该步骤h中还包括:
[0101]
步骤h1,根据当前控制量序列,执行当前控制量,判断是否已完成前导控制量或控制流已更新,否则返回至步骤s7,是则依次进行运动时间设定、启动硬件定时、根据角度值确定定速电机正转或反转和下一个控制量;
[0102]
步骤h2,判断是否完成所有控制量,否则重复步骤h1,
[0103]
步骤h3,当完成所有控制量时,判断角度值是否处于误差容忍内,是则保持当前角度、并准备更新数据流;
[0104]
步骤h4,当角度值未处于误差容忍内时,对最后一个控制量序列进行判断,符合要求则保持当前角度、并准备更新数据流;
[0105]
步骤h5,当最后一个控制量序列未符合要求,则切换至下组控制量序列,重复步骤h1至步骤h4的操控;
[0106]
步骤i、若已达到最终目标位置,则可以保持当前角度,并准备更新数据流,等待用户新的“期望值”。
[0107]
该定速电机控制方法由于将单个动作控制细分为多个阶段,在每个阶段可以采用不同的运动控制算法,因此,具有灵活性高、实时性高、精确度高和安全性高,在机械误差范围内可保证定速电机带动结构达到目标位置,以达到最优的控制效果,并根据定速电机的响应速度来进行合适的离散化序列控制,保证稳定的时序控制和系统的流畅性。
[0108]
以上所述实施例只是为本发明的较佳实施例,并非以此限制本发明的实施范围,除了具体实施例中列举的情况外;凡依本发明之方法及原理所作的等效变化,均应涵盖于本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1