基于内埋式PMSM扭矩提升算法的制作方法
基于内埋式pmsm扭矩提升算法
技术领域
1.本发明涉及电机弱磁控制方法领域,特别是涉及基于内埋式pmsm扭矩提升算法。
背景技术:
2.随着消费者对于电动交通工具的表现的期望越来越高,电力推动系统将会很大程度上依赖于高性能表现的电机。采用高能量的永磁体作为激励机制,使永磁同步电机pmsm在设计上达到高能量密度,高速度和高运行效率。
3.由于永磁同步电动机自身具有比感应电动机更为优越的性能,而且其d、q变换算法相对简单,电机转子磁极的位置易于检测,因此交流调速的矢量控制理论在永磁同步电动机的控制领域也得到了同样的重视。与此同时,对永磁同步电动机的调速控制性能也提出了更高的要求,高性能的永磁同步电动机调速系统除了要有良好的转矩控制性能外,还应具有较宽的调速范围。随着永磁同步电动机转矩的增加,电机定子绕组的反应电动势必然升高,当反电动势达到电机的额定电压或是逆变器的直流侧电压时,电机的输入电流将不能跟踪控制器的输出给定电流,引起电机的输出转矩降低。
4.此时,要设法降低永磁同步电动机的反应电动势,通过弱磁控制增加高速时电机的转矩输出能力。
技术实现要素:
5.为了克服上述现有技术存在的缺陷,本发明提供了基于内埋式pmsm扭矩提升算法,解决永磁同步电动机的反应电动势高导致电机的输入电流将不能跟踪控制器的输出给定电流,引起电机的输出转矩降低的问题。
6.本发明采用的技术方案在于:
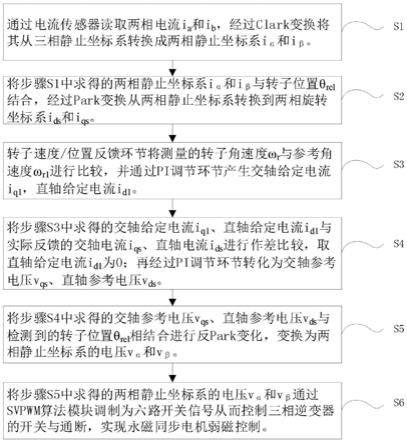
7.基于内埋式pmsm扭矩提升算法,包括以下步骤:
8.步骤s1、通过电流传感器读取两相电流ia和ib,经过clark变换将其从三相静止坐标系转换成两相静止坐标系i
α
和i
β
;
9.步骤s2、将步骤s1中求得的两相静止坐标系i
α
和i
β
与转子位置θ结合,经过park变换从两相静止坐标系转换到两相旋转坐标系i
ds
和i
qs
;
10.步骤s3、转子速度/位置反馈环节将测量的转子角速度ωr与参考角速度ω
r1
进行比较,并通过pi调节环节产生交轴给定电流i
q1
,直轴给定电流i
d1
;
11.步骤s4、将步骤s3中求得的交轴给定电流i
q1
、直轴给定电流i
d1
与实际反馈的交轴电流i
qs
、直轴电流i
ds
进行作差比较,取直轴给定电流i
d1
为0;再经过pi调节环节转化为交轴参考电压v
qs
、直轴参考电压v
ds
;
12.步骤s5、将步骤s4中求得的交轴参考电压v
qs
、直轴参考电压v
ds
与检测到的转子位置θ相结合进行反park变化,变换为两相静止坐标系的电压v
α
和v
β
;
13.步骤s6、将步骤s5中求得的两相静止坐标系的电压v
α
和v
β
通过svpwm算法模块调制为六路开关信号从而控制三相逆变器的开关与通断,实现永磁同步电机弱磁控制。
14.进一步地,所述步骤s1,通过电流传感器读取两相电流ia和ib,经过clark变换将其从三相静止坐标系转换成两相静止坐标系i
α
和i
β
的方法如下:
15.通过电流采集模块采集两相电流计算出三相电流ia,ib,ic,再通过clark变换计算出两相静止坐标系i
α
和i
β
;
16.两相静止坐标系i
α
和i
β
求解公式如下:
17.i
α
=(i
a-0.5(ib+ic))*2/3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
18.i
β
=1.732/2(i
b-ic)*2/3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)。
19.进一步地,所述步骤s2,将步骤s1中求得的两相静止坐标系i
α
和i
β
与转子位置θ结合,经过park变换从两相静止坐标系转换到两相旋转坐标系i
ds
和i
qs
的公式如下:
20.i
ds
=i
α
*cosθ+i
β
*sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
21.i
qs
=-i
α
*sinθ+i
β
*cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)。
22.进一步地,所述步骤s4,将步骤s3中求得的交轴给定电流i
q1
、直轴给定电流i
d1
与实际反馈的交轴电流i
qs
、直轴电流i
ds
进行作差比较,取直轴给定电流i
d1
为0;再经过pi调节环节转化为交轴参考电压v
qs
、直轴参考电压v
ds
的方法如下:
23.交轴给定电流i
q1
,直轴给定电流i
d1
与实际反馈的交轴电流i
qs
、直轴电流i
ds
进行作差比较,分别在q轴和d轴方向产生了交叉耦合电动势,采用常规的pi调解环节并结合前馈解耦控制方法求得d、q轴电压;
24.d、q轴前馈解耦公式如下:
[0025][0026]
式(5)中,vd为d轴的端电压,vq为q轴的端电压,k
pd
为pi调解器的比例增益,k
pq
为pi调解器的比例增益,k
id
为pi控制器的积分增益,k
iq
为pi控制器的积分增益,ωe是转速,ld为d轴的定子电感,lq为q轴的定子电感,id为d轴的电枢电流,iq为q轴的电枢电流;
[0027]
pmsm数学模型和所有的变量单位统一,同时在d、q转子参考系中建立d轴为直轴,q轴为交轴,定子电压等式在转子参考系中公式如下:
[0028][0029]
式(6)中,rs为定子电阻,ωr为每单位的角速度,p为导数算子,ψf为永磁体磁链;
[0030]
为了防止电机运行失控,将电流和电压限制在最大电流和最大电压范围内,电流和电压表示如下:
[0031][0032]
[0033]
式(7)、式(8)中,i
lim
为pmsm的最大电流,u
lim
为pmsm直流侧最大电压,电压和电流限制电机驱动系统的额定转矩下最大速度和电机驱动系统的最大转矩产生能力;
[0034]
基于pmsm模型确定弱磁运行方式:
[0035]
永磁同步电机由永磁体产生主磁场,增加d轴去磁分量削弱主磁场提升扭矩;
[0036]
依据式(6)至(8)忽略定子电阻,稳态电压约束公式如下:
[0037][0038]
电磁转矩te公式如下:
[0039]
te=n
piq
[ψf+(l
d-ld)id]
ꢀꢀꢀ
(10)
[0040]
式(10)中n
p
为极对数;
[0041]
转子的转速能公式如下:
[0042][0043]
式(11)中,t
l
为外部负载转矩,b为电机和负载的粘性摩擦系数,ω为电机角速度,j为转动惯量;
[0044]
采用的控制方法包括:
[0045]
当电机角速度ωr<ω
r1
时定义为区间一,当电机的角速度ω
r1
≤ωr≤ω
r2
时定义为区间二,当电机角速度ω
r2
≤ωr时定义为区间三;
[0046]
id=0时的控制方法:
[0047]
pmsm面贴式永磁同步电机中,d轴电感和q轴电感为约等于关系而且没有凸极效应,导致id=0时电流全部集中于q轴上,从而产生更大的转矩,id=0时定子电流中只有交轴分量,且定子磁动势空间矢量与永磁体磁场空间正交,电动机转矩中只有永磁转矩分量,其值为:
[0048]
te=n
p
ψfisꢀꢀꢀ
(12)
[0049]
式(12)中,is为电流最大值;
[0050]
最大转矩/电流控制:
[0051]
在电机基速以下时,在电机给定转矩条件下控制定子电流的模值为最小,使定子电流充分利用,电机进入区间一内运行;问题等效为式(7),式(10)满足的条件极值问题,根据拉格朗日极值定理,引入辅助函数如下:
[0052][0053]
式(13)中λ为拉格朗日乘子,h为辅助函数;
[0054]
对式(13)求偏导,并令其等于零,对式进行求解求得直轴电流id和交轴电流iq的关系为:
[0055][0056]
根据电机此时运行的区间,确定此时的直轴电流为负数,则求得:
[0057][0058]
随着iq的增大,iq按照式(15)变化时,求得电机的最大转矩/电流控制的轨迹;
[0059]
转速过度区域的控制方法:
[0060]
在电机转速超过基速,还未达到转折速度时,电压和电流极限环对电机限制,电机进入区间二内运行;为最大限度利用逆变器容量,控制电流矢量沿着电流限环逆时针向下;当电动机运行于某一角速度ωr时,由电压方程求得区间二内弱磁控制时电流矢量控制方程如下:
[0061][0062]
确定电流的轨迹路线,由式(16)得出:
[0063][0064]
最大转矩电压比控制方法:
[0065]
电动机超出转折速度后,电机进入区间三内运行,选择最大转矩电压比,进行电流路径规划;永磁同步电机沿着最大转矩电压比曲线运行,d、q轴电流受到电压限制点的约束;根据拉格朗日极值定理,引入辅助函数:
[0066]
h=(ωrl
qiq
)2+(ωrldid+ωrψf)2+λ{t
e-n
p
[ψfiq+(l
d-lq)idiq]}
ꢀꢀꢀ
(18)
[0067]
对式(18)求偏导,并令其等于零,求解求得直轴电流id和交轴电流iq的关系为:
[0068][0069]
式(19)为最大转矩电压比轨迹;再联立式(19)和电磁转矩公式(10)分别求得直轴电流id和交轴电流iq;
[0070]
由式(19)求得:
[0071][0072]
式中:
[0073]
式(20)中,c为磁通变化量;
[0074]
将式(20)代入式(18)中的偏导式求得:
[0075][0076]
求得最大转矩电压比的轨迹。
[0077]
进一步地,所述步骤s5,将步骤s4中求得的交轴参考电压v
qs
、直轴参考电压v
ds
与检测到的转子位置θ相结合进行反park变化,变换为两相静止坐标系的电压v
α
和v
β
的方法如下:
[0078]vα
=v
ds
cosθ-v
qs
sinθ
ꢀꢀꢀ
(22)
[0079]vβ
=v
ds
sinθ+v
qs
cosθ
ꢀꢀꢀ
(23)。
[0080]
进一步地,所述步骤s6,将步骤s5中求得的两相静止坐标系的电压v
α
和v
β
通过svpwm算法模块调制为六路开关信号从而控制三相逆变器的开关与通断,实现永磁同步电机弱磁控制:
[0081]
电压空间矢量u
out
旋转到某个区域中,所述u
out
由组成该区域的两个相邻的非零矢量和零矢量在时间上的不同组合产生,以扇区i为例,根据平衡等效原则得到公式如下:
[0082]
t
suout
=t4u4+t6u6+t0ꢀꢀꢀ
(24)
[0083]
t4+t6+t0=tsꢀꢀꢀ
(25)
[0084][0085]
式(24)中,u
out
为电压空间矢量,ts为一个载波周期,u4、u6分别为扇区i的合成矢量电压,t4为u4的作用时间,t6为u6的作用时间,t0为零矢量u0或u7的作用时间,u0、u7分别为零矢量电压;
[0086]
式(26)中,u1、u2分别为计算合成矢量电压;
[0087]
求解作用时间t4、t6和t0:
[0088][0089]
式(27)中,θ为合成矢量与主矢量的夹角;
[0090]
将式(26)及|u4|=|u6|=2u
dc
/3带入式中(27),得出了扇区作用时间t4、t6和t0或t7,公式如下:
[0091][0092]
式(28)中,um为合成矢量电压,u
dc
为母线电压;
[0093]
参考电压矢量的扇区判断:
[0094]
用u
α
和u
β
表示参考电压矢量u
out
在α、β轴上的分量,u
ref1
,u
ref2
和u
ref3
通过三角函数得出公式如下:
[0095][0096]
式(29)中,定义u
ref1
是投影到空间坐标系x的矢量分量,u
ref2
是投影到空间坐标系y的矢量分量,u
ref3
是投影到空间坐标系z的矢量分量;
[0097]
再定义3个变量a,b,c,通过分析可以得出:
[0098]
若uref1》0,则a=1,否则a=0;
ꢀꢀꢀ
(30)
[0099]
若uref2》0,则b=1,否则b=0;
ꢀꢀꢀ
(31)
[0100]
若uref3》0,则c=1,否则c=0;
ꢀꢀꢀ
(32)
[0101]
定义扇区n=4c+2b+a,求得u
out
所在扇区;
[0102]
非零矢量和零矢量作用时间的计算:
[0103][0104]
通过对式(33)进行转换,得出以下公式:
[0105][0106]
求解其他扇区各矢量的作用时间,公式如下:
[0107][0108]
式(35)中,x为空间坐标系矢量的作用时间,y为空间坐标系矢量的作用时间,z为空间坐标系矢量的作用时间;
[0109]
求得各个扇区t0或t7、t4和t6作用的时间;
[0110]
如果t4+t6>ts,则需进行过调制处理,过调制处理公式如下:
[0111]
[0112]
扇区矢量切换点的确定:
[0113]
三相电压开关切换时间ta、tb和tc,公式如下:
[0114][0115]
ta、tb和tc分别为三相电压开关时间切换点t
cm1
、t
cm2
和t
cm3
与各扇区的关系;
[0116]
最后使用一定频率的三角载波信号与各个扇区矢量切换点进行比较,从而可以产生变换器所需的pwm脉冲信号。
[0117]
本发明的有益效果是:
[0118]
1.降低永磁同步电动机的反应电动势,通过弱磁控制增加高速时电机的转矩输出能力。
[0119]
2.svpwm控制策略是依据变流器空间电压(电流)矢量切换来控制变流器的一种新颖思路和控制策略,其主要思想在于抛弃原有的spwm算法,采用逆变器空间电压矢量的切换以获得准圆形旋转磁场,从而在不高的开关频率条件下,使得交流电机获得较spwm算法更好的控制性能。
[0120]
3.svpwm算法实际上是对应于交流电机中的三相电压摞逆变器功率器件的一种特殊的开关触发顺序和脉宽大小的组合,这种开关触发顺序和组合将在定子线罔中产生三相互差120度的电角度、失真较小的正弦波电流波形。实践和理论证明,与直接的spwm技术相比,svpwm算法的优点主要有:svpwm优化谐波程度比较高,消除谐波效果要比spwm好,实现容易,并且提高电压利用率;svpwm算法提高了电压源逆变器的直流电压利用率和电机的动态响应速度,同时减小了电机的转矩脉动等缺点;svpwm比较适合于数字化控制系统。
附图说明
[0121]
图1是基于内埋式pmsm扭矩提升算法的步骤流程框图;
[0122]
图2是基于内埋式pmsm扭矩提升算法的永磁同步电机弱磁运行轨迹示意图;
[0123]
图3是基于内埋式pmsm扭矩提升算法的定子电流矢量轨迹示意图;
[0124]
图4是基于内埋式pmsm扭矩提升算法的最小磁链转矩比的定子电流矢量轨迹示意图;
[0125]
图5是基于内埋式pmsm扭矩提升算法的mtpv定子电流矢量轨迹示意图;
[0126]
图6是基于内埋式pmsm扭矩提升算法的电压空间矢量合成示意图;
[0127]
图7是基于内埋式pmsm扭矩提升算法的电压空间矢量扇区图;
[0128]
图8是基于内埋式pmsm扭矩提升算法的参考电压矢量的扇区对应表示意图;
[0129]
图9是基于内埋式pmsm扭矩提升算法的扇区与参考电压矢量之间的关系示意图;
[0130]
图10是基于内埋式pmsm扭矩提升算法的各扇区t0或t7、t4和t6作用时间对应表示意图;
[0131]
图11是基于内埋式pmsm扭矩提升算法的tcm1、tcm2和tcm3扇区切换点对应表示意图;
具体实施方式
[0132]
如图1所示,本实施例包括以下步骤:
[0133]
步骤s1,通过电流传感器读取两相电流ia和ib,经过clark变换将其从三相静止坐标系转换成两相静止坐标系i
α
和i
β
。
[0134]
通过电流采集模块采集两相电流计算出三相电流ia,ib,ic,再通过clark变换计算出两相静止坐标系i
α
和i
β
;
[0135]
两相静止坐标系i
α
和i
β
求解过程如下:
[0136]iα
=(i
a-0.5(ib+ic))*2/3
ꢀꢀꢀ
(1)
[0137]iβ
=1.732/2(i
b-ic)*2/3
ꢀꢀꢀ
(2)。
[0138]
步骤s2,将步骤s1中求得的两相静止坐标系i
α
和i
β
与转子位置θ结合,经过park变换从两相静止坐标系转换到两相旋转坐标系i
ds
和i
qs
。
[0139]
两相旋转坐标系i
ds
和i
qs
求解过程如下:
[0140]ids
=i
α
*cosθ+i
β
*sinθ
ꢀꢀꢀ
(3)
[0141]iqs
=-i
α
*sinθ+i
β
*cosθ
ꢀꢀ
(4)。
[0142]
步骤s3,转子速度/位置反馈环节将测量的转子角速度ωr与参考角速度ω
r1
进行比较,并通过pi调节环节产生交轴给定电流i
q1
,直轴给定电流i
d1
。
[0143]
步骤s4,将步骤s3中求得的交轴给定电流i
q1
、直轴给定电流i
d1
与实际反馈的交轴电流i
qs
、直轴电流i
ds
进行作差比较,取直轴给定电流i
d1
为0;再经过pi调节环节转化为交轴参考电压v
qs
、直轴参考电压v
ds
。
[0144]
交轴给定电流i
q1
,直轴给定电流i
d1
与实际反馈的交轴电流i
qs
、直轴电流i
ds
进行作差比较,分别在q轴和d轴方向产生了交叉耦合电动势,采用常规的pi调解环节并结合前馈解耦控制方法得到d、q轴电压;
[0145]
d、q轴前馈解耦公式如下:
[0146][0147]
式(5)中,vd为d轴的端电压,vq为q轴的端电压,k
pd
为pi调解器的比例增益,k
pq
为pi调解器的比例增益,k
id
为pi控制器的积分增益,k
iq
为pi控制器的积分增益,ωe是转速,ld为d轴的定子电感,lq为q轴的定子电感,id为d轴的电枢电流,iq为q轴的电枢电流;
[0148]
pmsm数学模型和所有的变量单位统一,同时在d、q转子参考系中建立d轴为直轴,q轴为交轴,定子电压等式在转子参考系中公式如下:
[0149][0150]
式(6)中,rs为定子电阻,ωr为每单位的角速度,p为导数算子,ψf为永磁体磁链;
[0151]
为了防止电机运行失控,将电流和电压限制在最大电流和最大电压范围内,电流和电压表示如下:
[0152][0153][0154]
式(7)、式(8)中,i
lim
为pmsm的最大电流,u
lim
为pmsm直流侧最大电压,电压和电流限制电机驱动系统的额定转矩下最大速度和电机驱动系统的最大转矩产生能力。
[0155]
基于pmsm模型确定两种弱磁运行方式:
[0156]
当电机恒功率区工作时,随着电机速度的提升,电机定子电压也随之升高,当定子电压达到额定电压,如果继续提升电机转速,不能再通过继续升压的方式来实现,只能通过降低励磁磁链减小反电势部分的电压来维持电压平衡。
[0157]
永磁同步电机由永磁体产生主磁场,无法调节励磁磁链,通过增加d轴去磁分量削弱主磁场提升扭矩。
[0158]
依据式(6)至(8)忽略定子电阻,稳态电压约束公式如下:
[0159][0160]
电磁转矩te公式如下:
[0161]
te=n
piq
[ψf+(l
d-ld)id]
ꢀꢀꢀ
(10)
[0162]
式(10)中n
p
为极对数;
[0163]
转子的转速动能公式如下:
[0164][0165]
式(11)中,t
l
为外部负载转矩,b为电机和负载的粘性摩擦系数,ω为电机角速度,j为转动惯量;
[0166]
式(9)中,一个给定的运行点位于电压限制圆和电流限制圆的交点处或者在电压限制圆和电流限制圆之内,其将不会超过电压或者电流限制约束。
[0167]
如图2所示,为了在弱磁区域获得最大的转矩,电机必须同时运行在电压和电流限制模型中。依据运行状况,提出两个弱磁方式:
[0168]
方式1:电流和电压限制区域,当速度上升或者dc电压下降时,电压椭圆收缩,电机驱动运行在电流和电压限制区域中,此时的电机运行点在沿着线ab上,在电流限制曲线和电压的交点。
[0169]
方式2:电压限制区域,当速度进一步上升,电机运行在电压限制中,为获得最大转矩将沿着线bc运行,从恒转矩曲线与电压限制椭圆相切点到椭圆中心点的连线。
[0170]
基于两种弱磁运行方式,进一步制定弱磁的pmsm矢量控制方法:
[0171]
为了更好的得到电机驱动的控制,必须依靠电机的弱磁控制策略,基于弱磁的pmsm矢量控制方法内容如下:
[0172]
pmsm能工作在一个广泛的恒定功率运行区域中通过弱磁控制用作牵引应用中,并且d和q轴电枢电流将会根据速度和转矩的要求而发生变化,从而获得d和q轴的电枢电流,永磁同步电动机的用途不同,电动机电流矢量控制方法也各不相同。
[0173]
采用的控制方法包括:
[0174]
在图3-5中,当电机角速度ωr<ω
r1
时定义为区间一,当电机的角速度ω
r1
≤ωr≤ω
r2
时定义为区间二,当电机角速度ω
r2
≤ωr时定义为区间三。
[0175]
id=0时的控制方法:
[0176]
pmsm面贴式永磁同步电机中,d轴电感和q轴电感为约等于关系而且没有凸极效应,导致id=0时电流全部集中于q轴上,从而产生更大的转矩,id=0时定子电流中只有交轴分量,且定子磁动势空间矢量与永磁体磁场空间正交,电动机转矩中只有永磁转矩分量,其值为:
[0177]
te=n
p
ψfisꢀꢀꢀ
(12)
[0178]
式(12)中,is为电流最大值。
[0179]
最大转矩/电流控制(mtpa):
[0180]
在电机基速以下时,为了充分利用定子电流,要求在电机给定转矩条件下控制定子电流的模值最小,电机进入区间一(图3中oa段)内运行。问题等效为式(7),式(10)满足的条件极值问题,根据拉格朗日极值定理,引入辅助函数如下:
[0181][0182]
式(13)中λ为拉格朗日乘子,h为辅助函数;
[0183]
对式(13)求偏导,并令其等于零,对式进行求解便得到直轴电流id和交轴电流iq的关系为:
[0184][0185]
由电机此时运行的区间得知,确定此时的直轴电流为负数,则求得:
[0186][0187]
如图3中的oa段所示,随着iq的增大,iq按照式(15)变化时,得到电机的最大转矩/电流控制的轨迹。
[0188]
转速过度区域的控制方法:
[0189]
在电机转速超过基速,还未达到转折速度时,电压和电流极限环对电机限制,电机进入区间二(图3中ab段)内运行;为最大限度利用逆变器容量,控制电流矢量沿着电流限环逆时针向下。当电动机运行于某一角速度ωr时,由电压方程求得区间二内弱磁控制时电流矢量控制方程如下:
[0190][0191]
由此确定电流的轨迹路线,其轨迹路线如图4中的ab段所示,由式(16)得出:
[0192][0193]
最大转矩电压比(mtpv)控制方法:
[0194]
电动机超出转折速度后,电机进入区间三(图5中bc段)内运行,选择最大转矩电压比,进行电流路径规划。永磁同步电机沿着最大转矩电压比曲线运行,d、q轴电流受到电压限制点的约束。根据拉格朗日极值定理,引入辅助函数:
[0195]
h=(ωrl
qiq
)2+(ωrldid+ωrψf)2+λ{t
e-n
p
[ψfiq+(l
d-lq)idiq]}
ꢀꢀꢀ
(18)
[0196]
对式(18)求偏导,并令其等于零,求解便得到直轴电流id和交轴电流iq的关系为:
[0197][0198]
式(19)为最大转矩电压比轨迹。再联立式(19)和电磁转矩公式(10)分别得到直轴电流id和交轴电流iq。如图5所示,最大转矩电压比的轨迹几何上是电压极限椭圆和转矩双曲线切点的连线。
[0199]
由式(19)得到:
[0200][0201]
式中:
[0202]
式(20)中,c为磁通变化量;
[0203]
将式(20)代入式(18)中的偏导式得到:
[0204][0205]
得到最大转矩电压比的轨迹,如图5中所示的bc段所示。
[0206]
步骤s5,将步骤s4中求得的交轴参考电压v
qs
、直轴参考电压v
ds
与检测到的转子位置θ相结合进行反park变化,变换为两相静止坐标系的电压v
α
和v
β
。
[0207]vα
=v
ds
cosθ-v
qs
sinθ
ꢀꢀꢀ
(22)
[0208]vβ
=v
ds
sinθ+v
qs
cosθ
ꢀꢀꢀ
(23)。
[0209]
步骤s6,将步骤s5中求得的两相静止坐标系的电压v
α
和v
β
通过svpwm算法模块调制为六路开关信号从而控制三相逆变器的开关与通断,实现永磁同步电机弱磁控制。
[0210]
svpwm算法的理论基础是平均值等效原理,即在一个开关周期ts内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
[0211]
如图6、图7所示,电压空间矢量u
out
旋转到某个区域中,所述u
out
由组成该区域的两个相邻的非零矢量和零矢量在时间上的不同组合产生,以扇区i为例,根据平衡等效原则得
到公式如下:
[0212]
t
suout
=t4u4+t6u6+t0ꢀꢀꢀ
(24)
[0213]
t4+t6+t0=tsꢀꢀꢀ
(25)
[0214][0215]
式(24)中,u
out
为电压空间矢量,ts为一个载波周期,u4、u6分别为扇区i的合成矢量电压,t4为u4的作用时间,t6为u6的作用时间,t0为零矢量u0或u7的作用时间,u0、u7分别为零矢量电压。
[0216]
式(26)中,u1、u2分别为计算合成矢量电压。
[0217]
求解作用时间t4、t6和t0:
[0218][0219]
式(27)中,θ为合成矢量与主矢量的夹角。
[0220]
将式(26)及|u4|=|u6|=2u
dc
/3带入式中(27),得到扇区作用时间t4、t6和t0或t7,公式如下:
[0221][0222]
式(28)中,um为合成矢量电压,u
dc
为母线电压;
[0223]
在svpwm调制中,要使得合成矢量在线性区域内调制,则要满足|u
out
|=um≤2u
dc
/3,即m
max
=2/1.732=1.1547,由此得知,在svpwm调制中调制深度最大值达到1.1547,比spwm调制最高所能达到的调制比1高出0.1547,使直流母线电压利用率提高。
[0224]
参考电压矢量的扇区判断:
[0225]
用u
α
和u
β
表示参考电压矢量u
out
在α、β轴上的分量,u
ref1
,u
ref2
和u
ref3
通过三角函数得出公式如下:
[0226][0227]
式(29)中,定义u
ref1
是投影到空间坐标系x的矢量分量,u
ref2
是投影到空间坐标系y的矢量分量,u
ref3
是投影到空间坐标系z的矢量分量。
[0228]
再定义3个变量a,b,c,通过分析得出:
[0229]
若uref1》0,则a=1,否则a=0;
ꢀꢀꢀ
(30)
[0230]
若uref2》0,则b=1,否则b=0;
ꢀꢀꢀ
(31)
[0231]
若uref3》0,则c=1,否则c=0;
ꢀꢀꢀ
(32)
[0232]
如图8、图9所示,定义扇区n=4c+2b+a,得到u
out
所在扇区。
[0233]
非零矢量和零矢量作用时间的计算:
[0234]
如图8所示,得出:
[0235][0236]
通过对式(33)进行转换,得出以下公式:
[0237][0238]
求解其他扇区各矢量的作用时间,公式如下:
[0239][0240]
式(35)中,x为空间坐标系矢量的作用时间,y为空间坐标系矢量的作用时间,z为空间坐标系矢量的作用时间。
[0241]
如图10所示,得到各个扇区t0或t7、t4和t6作用的时间;
[0242]
如果t4+t6>ts,则需进行过调制处理,过调制处理公式如下:
[0243][0244]
扇区矢量切换点的确定:
[0245]
三相电压开关切换时间ta、tb和tc,公式如下:
[0246][0247]
如图11所示,ta、tb和tc分别为三相电压开关时间切换点t
cm1
、t
cm2
和t
cm3
与各扇区的关系;
[0248]
最后使用一定频率的三角载波信号与各个扇区矢量切换点进行比较,从而产生控制器所需的pwm脉冲信号,从而可以产生控制器所需的pwm脉冲信号从而提升扭矩输出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1