一种双天线构型的自由漂浮空间太阳能电站
1.本发明涉及太阳能发电技术领域,具体涉及一种双天线构型的自由漂浮空间太阳能电站。
背景技术:
2.双天线构型的自由漂浮空间太阳能电站,也被称为太阳能发电卫星、天空发电站,是指在空间将太阳能转化为电能,再通过无线方式将能量传输到地面供地面使用的电力系统。
3.目前人们已经有利用地面双天线构型的自由漂浮空间太阳能电站发电的技术和相应的装置,但是地面双天线构型的自由漂浮空间太阳能电站存在着电池利用率低、开发成本高和发电效率低、不能持续供电的明显缺点,具体体现为六个方面,一是能量密度低,难以大规模开发利用;二是能量密度分布不均匀,发电与用电难以协调;三是占用大量陆地面积,造成环境破坏,生态受影响;四是受昼夜更替影响,无法对用户持续供电;五是易受天气变化影响,发电效率没有保证,难以预测;六是电量难以储存,难以满足用户用电需求。因此,地面双天线构型的自由漂浮空间太阳能电站并不能很好解决替代化石燃料来大量使用的问题,我们必须要寻找一个更加高效利用太阳能的办法。
4.相比起在地面上可利用的太阳能平均功率密度仅140-250w/m2,而且还存在能量传输波动,在太空中,太阳能的功率密度高,是地面的5-10倍,且能量稳定传输。特别是在地球同步轨道,一年之中99%的时间可稳定接收太阳辐射。在地球静止轨道上一个宽度1k的照射带,一年中能够产生的能量约为212tw,这相当于目前所有已探明的可开采石油所能产生能量总和。因而,如何有效利用空间太阳能,成为解决人类能源问题的重要研究课题之一。
技术实现要素:
5.本发明提供一种的双天线构型的自由漂浮空间太阳能电站,能够有效利用空间太阳能。
6.本发明采用如下技术方案:
7.一种双天线构型的自由漂浮空间太阳能电站,包括:太阳能发电模块、微波无线能量传输模块、姿轨控制模块、连接体和控制管理模块。
8.微波无线能量传输模块用于将电能转化成微波能,并向地面传输微波能量。
9.姿轨控制模块具有驱动机构和导电旋转关节,用于调节姿态和轨道,致使所述太阳能发电模块准对日定向和所述微波无线能量传输模块对地定向。
10.所述太阳能发电模块、微波无线能量传输模块和姿轨控制模块均装配在所述连接体上。
11.控制管理模块用于收集整个系统的工作信息,对各个模块进行统一运行管理,所述太阳能发电模块、微波无线能量传输模块和姿轨控制模块均与所述控制管理模块电性连
接。
12.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:还包含有能量管理模块,具有电力传输母线,所述能量管理模块用于将太阳能发电模块的电能通过电力传输母线和导电旋转关节传输到微波无线能量传输模块中,所述能量管理模块与所述控制管理模块电性连接。
13.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:还包含有空间绳系模块,空间绳系模块用于与连接体连接,空间绳系模块为所述太阳能发电模块提供支撑。
14.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:还包含有均热模块,所述太阳能发电模块、微波无线能量传输模块、姿轨控制模块、连接体和能量管理模块均与所述均热模块连接。
15.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:所述连接体包含有:主桁架和次桁架;所述导电旋转关节配置在所述主桁架上;所述次桁架配置在所述导电旋转关节上,且所述主桁架呈十字分布;其中,所述导电旋转关节驱动所述次桁架活动,所述微波无线能量传输模块和太阳能发电模块均配置在所述次桁架上。
16.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:所述驱动机构配置在所述主桁架上。
17.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:还包含有太阳敏感器,所述太阳敏感器与所述控制管理模块电性连接。
18.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:所述驱动机构为控制力矩陀螺或电推力器。
19.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:所述控制管理模块包含有中央控制计算机和节点控制计算机。
20.本公开的至少一实施例提供的双天线构型的自由漂浮空间太阳能电站中:所述主桁架和次桁架均为碳纤维桁架。
21.本发明的有益效果为:
22.1、在民用领域,双天线构型的自由漂浮空间太阳能电站可以为偏远地区以及受灾地区提供快速和连续的紧急供电援助。
23.2、双天线构型的自由漂浮空间太阳能电站的发展可以为城市或移动装备供电,实现灵活供电。
附图说明
24.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
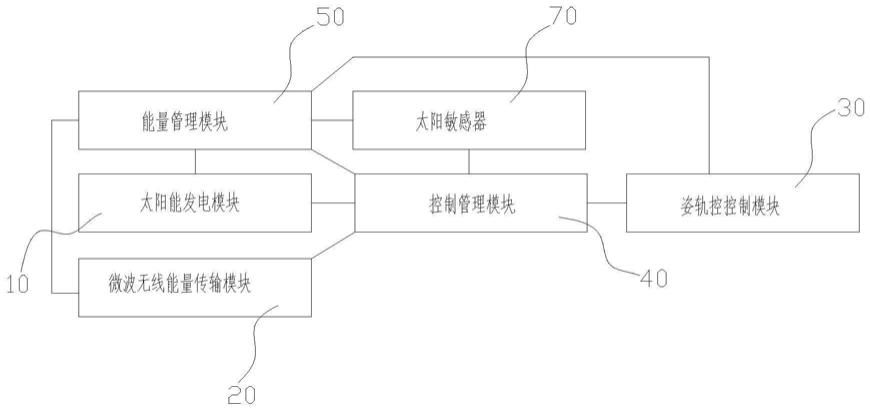
25.图1为本发明一种双天线构型的自由漂浮空间太阳能电站的结构框图。
26.图2为本发明一种双天线构型的自由漂浮空间太阳能电站的次桁架和主桁架的连接示意图。
27.图3为本发明一种双天线构型的自由漂浮空间太阳能电站的结构示意图。
28.图中:
29.10、太阳能发电模块;20、微波无线能量传输模块;30、姿轨控制模块;33、导电旋转关节;40、控制管理模块;50、能量管理模块;70、太阳敏感器;71、次桁架;72、主桁架。
具体实施方式
30.下面将结合实施例中的附图,对实施例中的技术方案进行清晰、完整地描述,显然,所描述的实施例仅仅是一部分实施例,而不是全部的实施例。
31.在实施例中,需要理解的是,术语“中间”、“上”、“下”、“顶部”、“右侧”、“左端”、“上方”、“背面”、“中部”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
32.另外,在本发明的描述中,需要说明的是,除非另有明确的规定和限定,安装、连接和相连等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
33.实施例
34.如图1和3所示,一种双天线构型的自由漂浮空间太阳能电站,包括:太阳能发电模块10、微波无线能量传输模块20、姿轨控制模块30、连接体、控制管理模块40、能量管理模块50、空间绳系模块(未图示)、均热模块(未图示)和太阳敏感器70。
35.微波无线能量传输模块20用于将电能转化成微波能,并向地面传输微波能量。
36.姿轨控制模块30具有驱动机构和导电旋转关节31,用于调节姿态和轨道,致使所述太阳能发电模块准对日定向和所述微波无线能量传输模块对地定向。
37.太阳能发电模块10、微波无线能量传输模块20和姿轨控制模块30均装配在所述连接体上,连接体主要功能是将各分系统连接在一起,提供一定的刚度和强度,为电站设备提供安装接口,并且为系统的维护提供平台。
38.控制管理模块40用于收集整个系统的工作信息,对各个模块进行统一运行管理,太阳能发电模块10、微波无线能量传输模块20和姿轨控制模块30均与控制管理模块40电性连接。
39.在本实施例中,能量管理模块50具有电力传输母线,能量管理模块用于将太阳能发电模块10的电能通过电力传输母线和导电旋转关节传输到微波无线能量传输模块20中,能量管理模块50与控制管理模块40电性连接。
40.在本实施例中,空间绳系模块用于与次桁架连接。空间绳系模块用于为太阳能发电模块提供支撑,增加支撑结构的刚度,减小薄膜太阳能电池的变形。
41.在本实施例中,所述太阳能发电模块10、微波无线能量传输模块20、姿轨控制模块30、连接体和能量管理模块50均与均热模块连接。均热模块主要功能是将热量分散到每一个分系统中,保证各个分系统部件和设备处于正常的工作温度。
42.如图2所示,在本实施例中,连接体包含有:主桁架72和次桁架71;导电旋转关节31
配置在主桁架72上;次桁架71配置在所述导电旋转关节31上,且所述次桁架71呈十字分布;其中,导电旋转关节31允许次桁架71绕主桁架72转动,微波无线能量传输模块20和太阳能发电模块10均配置在次桁架71上。主桁架选用t700碳纤维复合材料,杆件密度ρ=1790kg/m3,线密度为ρa=14.3375kg/m,杆件等效半径为0.69m,等效厚度为0.0018m,考虑到主桁架72主要受到轴向的作用力,其余的方向受力较小,可以近似认为各向同性,取杆件杨氏模量e=230gpa,泊松比为0.3。次桁架71也是采用t700碳纤维复合材料,杆件密度也是ρ=1790kg/m3,模型线密度为ρa=16.776kg/m,杆件等效半径为0.35m,杆件等效厚度为0.0017m。同样考虑到次桁架模块主要受到轴向作用力,所以可以近似认为材料是各项同性材料,取杆件杨氏模量e=230gpa,泊松比为0.3。
43.在本实施例中,导电旋转关节31是电力汇聚的部件,导电旋转关节31除了起到电能汇集的作用外,还起到了旋转副的作用。导电旋转关节31套设在主桁架72外,在大功率电能驱动下可以使得与导电旋转关节31连接的次桁架71绕导电旋转关节31转动,实现准对日定向姿态。通过配置有多个导电旋转关节31,当某个导电旋转关节失效时,其余导电旋转关节仍可以通过电能带动失效的导电旋转关节进行旋转。
44.在本实施例中,主桁架72和次桁架71上均配置有驱动机构。
45.在本实施例中,太阳敏感器70与控制管理模块40电性连接。
46.在本实施例中,控制管理模块40包含有中央控制计算机和节点控制计算机。中央控制计算机主要与节点控制计算机之间进行信息交互,并发送控制指令,用于整个双天线构型的自由漂浮空间太阳能电站的轨道控制。节点控制计算机按照太阳能发电模块的区域分布布置,节点控制算机收集所在区域的相关模块的工作状态信息后,与中央控制计算机协同进行控制策略分析,根据中央控制计算机的控制指令对所在区域的执行机构进行控制。
47.如图3所示,在本实施例中,采用微波无线能量传输模块20、三个太阳能发电模块10阵列的构型,与目前单个微波发射天线的方案对比,质量分布更均匀,在分布式太空环境干扰力、分布式惯性力的作用下,产生的结构振动更小,有利于实现轻量化设计。采用水平和竖直方向的镜面对称布局方式,使太空环境干扰力引起的姿态干扰力矩很小,有利于节省控制燃料,降低燃料的生成、发射、加注成本。由于采用了两个微波发射天线,太阳能电池产生的电能可以向最近的微波发射天线传输,降低了输电导线的长度,降低了质量。
48.在一些实施例中,驱动机构为控制力矩陀螺。
49.在一些实施例中,驱动机构为电推力器。
50.示例性地,本公开的姿轨控制模块将地球同步拉普拉斯轨道和太阳冻结轨道两个概念结合选取了双天线构型的自由漂浮空间太阳能电站的初始运行轨道,以减小施加控制保持轨道所消耗的燃料。
51.本公开的姿轨控制模块采用准对日定向姿态作为太阳能电池阵列的俯仰姿态方式。
52.然而,研究表明:准对日定向姿态是不稳定的,初始的姿态误差会迅速放大。在空间摄动的影响下,系统轨道参数存在非周期性变化,而轨道的变化会进一步影响姿态,使太阳能电池板偏离准对日定向姿态。示例性地,本公开以理想的准对日定向姿态角序列为理想值设计控制管理模块。控制误差定义为:
[0053][0054]
控制力矩为表示为:
[0055][0056]
其中k
p
=2.1359
×
105和kd=4.1006
×
108分别为比例和微分增益。
[0057]
太阳冻结轨道确定偏心率粗略值的计算方法为:
[0058]
考虑微波反作用通过下式算得达到要求的偏心率e的粗略值:
[0059][0060][0061]
其中:f
srp
:ab的太阳光压力矢量。
[0062]
p:太阳光压常数,p=4.5
×
10-6n·
m2。
[0063]
s:平均受光面积。
[0064]
u:太阳辐射方向的单位向量。
[0065]
n:面向太阳的曲面的向内单位法向量。
[0066]
ρa、ρs和ρd分别为:吸收比、镜面反射比和漫反射比。
[0067]
a:轨道半径。
[0068]gsrp
:f
srp
引起的加速度。
[0069]
地球同步拉普拉斯轨道确定轨道倾角和半长轴的粗略值。
[0070]
轨道倾角:i=7.5
°
。
[0071]
半长轴:a=42164000m。
[0072]
在计算出的e和a理论值附近调控e和a,以获得能够最长时间不施加控制的轨道的轨道根数。通过matlab仿真,我们获得了世界时2050年6月21日12:00(给出儒略日)的最优初始轨道,能够满足五年无控飞行。最优初始轨道六根数如下:
[0073]
初始轨道根数最优值轨道倾角i07.5
°
半长轴a042163800(m)偏心率e00.0135近地点幅角w089.36
°
升交点赤经ω00
°
真近点角f076.5
°
[0074]
在本说明书的描述中,参考术语“本实施例”、“一些实施例”、“其他实施例”或“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个
实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0075]
尽管上面已经示出和描述了本技术的实施例,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内;除非明确说明,否则本文中使用的任何元件、动作或指令都不应解释为关键或必要的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1