一种轻载室内巡检机器人自主充电系统及方法与流程
1.本发明涉及巡检机器人控制技术领域,具体为一种轻载室内巡检机器人自主充电系统及方法。
背景技术:
2.随着智能技术的不断发展和进步,巡检机器人已经在各个领域得到应用。轻载室内巡检机器人是集环境感知、动态决策与规划于一体的多功能综合系统,以人工智能为核心,包括传感器、信息处理、电子工程、计算机工程、自动化等前沿技术。随着巡检机器人功能的不断扩展,除了感知定位、路径规划、自主避障等基础功能外,其自主充电功能及安全性、准确率、效率也同样不可忽视。
3.目前,轻载室内巡检机器人最常见的自主充电有三种方式:基于红外的自主充电、基于视觉的自主充电和基于激光雷达的自主充电。其中基于红外的自主充电主要是依赖红外传感器实现机器人与充电桩的对接,该方法需要多次调节机器人的方向以达到精准对接的目的,操作复杂,并且红外传感器信号容易受到外界环境干扰,导致充电失败。基于视觉的自主充电方案主要是采用相机识别充电桩,在光线较强或者黑夜环境下不能适用,巡检机器人的自主性受到很大的局限性;基于激光雷达的自主充电可以适应不同的环境,其抗干扰能力较强,但是这种方法需要依靠精准的定位算法,在充电安全性、准确率和效率得不到有效保障。
4.针对以上问题,轻载室内巡检机器人自主充电功能亟待解决的是充电安全性和充电效率等问题。
技术实现要素:
5.本发明针对现有技术的不足,提出一种结合激光雷达和红外传感器的自主充电系统及方法,基于激光雷达点云来识别充电桩和红外传感器信号控制机器人,该方法操作简单,安全可靠,充电效率高。具体技术方案如下:
6.一种轻载室内巡检机器人自主充电方法,采用步骤为:
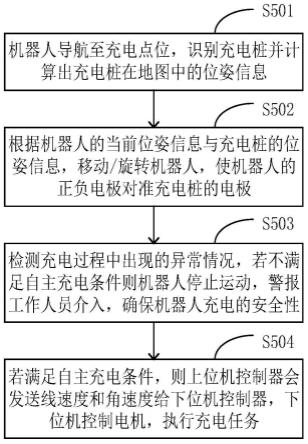
7.步骤一:机器人导航至充电点位,识别充电桩并计算出充电桩在地图中的位置和姿势信息;
8.步骤二:根据机器人和充电桩的位置和姿势信息,调整机器人位置和姿势,使机器人的正负极对准充电桩的正负极;
9.步骤三:检测充电过程是否出现异常情况,是则机器人停止运动,发出报警信息,否则进入下一步;
10.步骤四:上位机发出控制信号,控制电机移动,执行自主充电。
11.作为优选:所述步骤一中,充电桩识别的具体方法为:
12.采用单线激光雷达识别充电桩,如果检测机器人电量较低,则首先导航至充电桩前方的充电点位,订阅单线激光雷达的点云坐标数据(xn,yn);得到点云数据之后,寻找两点
之间距离最近的一组点,经过筛选并采用最小二乘法拟将这些点合成线段,两个点云之间的距离d_poin计算公式为:
[0013][0014]
根据选定的一组激光点云坐标点(x1,y1)(x2,y2)
…
(xn,yn),将其进行拟合成一条线段,线段可根据直线的数学表达式得到:
[0015]
y=a0+a1x
[0016]
选定将残差的平方和sr最小作为“最佳”拟合准则,计算公式为:
[0017][0018]
然后从拟合的直线中判断是否有符合充电桩的“v”形结构的两条线段,充电桩线段的判断准则如下:
[0019]
拟合的线段如果小于0.1米,认为此线段不是充电桩线段;
[0020]
拟合的线段如果大于0.25米,认为此线段不是充电桩线段;
[0021]
拟合线段上的点到激光雷达的距离小于0.1米,认为此线段不是充电桩线段;
[0022]
拟合线段上的点到激光雷达的距离大于1.2米,认为此线段不是充电桩线段;
[0023]
如果线段上的点少于20个,认为此线段不是充电桩线段;
[0024]
如果线段上的点大于600个,认为此线段不是充电桩线段;
[0025]
根据以上充电桩线段判断规则,可以得到两条符合充电桩“v”形特征线段,设两条线段line_0和line_1的两个点坐标为(p0,p1)和(q0,q1),斜率分别为k0和k1,设goal_point为充电桩目标点,corner_point为充电桩“v”形结构角点,目标点goal_point到corner_point的距离dis_goal为0.25米,可以计算corner_point点坐标(l0,l1)为:
[0026][0027][0028]
充电桩目标点坐标(x,y)和位姿θ0为:
[0029][0030][0031][0032]
作为优选:所述步骤二具体为:
[0033]
采用单线激光雷达和红外传感器判断机器人与充电桩的相对位置和姿态,并控制机器人移动,完成充电对接;
[0034]
在识别充电桩和得到充电桩的位置信息之后,此时能够通过订阅机器人的当前位置和姿态信息,并不断调整机器人的位姿,使机器人正对充电桩,具体调整方案分为三个步骤。
[0035]
2.1:机器人从充电点位开始移动,向前行驶,靠近充电桩,在距离充电桩前方约0.5米处停止运动;然后订阅机器人的姿态,如果机器人有姿态误差,则机器人原地左右旋转调整机器人姿态,确保机器人正对充电桩,即机器人的姿态和充电桩的姿态相同;
[0036]
2.2:在第一阶段结束后,此时机器人的头部是正对着充电桩,将机器人原地旋转180
°
,若机器人尾部的红外传感器接收到充电桩的红外数据,则机器人停止旋转;
[0037]
2.3:在第二阶段结束后,机器人的尾部正对着充电桩,此时控制机器人后退,直到与充电桩的电极对接,完成充电任务。
[0038]
在激光雷达坐标系下,已知充电桩的坐标(x,y),则机器人与充电桩之间的距离d和位姿θ计算公式:
[0039][0040][0041]
作为优选:所述步骤三具体为:
[0042]
3.1开始;
[0043]
3.2判断充电桩识别是否成功,是则进入下一步,否则进入步骤3.6;
[0044]
3.3判断充电桩前后是否有障碍物,是否进入下一步,是则进入步骤3.6;
[0045]
3.4判断是否有红外线信号,是则进入下一步,否则进入步骤3.6
[0046]
3.5执行充电任务,充电完成,结束;
[0047]
3.6机器人停止运动,发出报警信息,人工介入。
[0048]
一种轻载室内巡检机器人自主充电方法的系统,设置有下位机控制器,该下位机控制器的第一控制端与电机系统连接,电池管理端与电池单元连接,第一采集端与激光雷达单元连接,第二采集端与红外传感器单元连接,通信端与上位机控制器连接。
[0049]
作为优选:所述下位机控制器与电机系统通过can协议进行通讯;所述下位机控制器与电池单元通过rs232进行通讯,红外传感器与下位机控制器通过单片机的io口控制;激光雷达通过udp协议给上位机控制器传输数据;下位机控制器与上位机控制器之间通过tcp协议进行数据传输。
[0050]
作为优选:所述电机系统中的电机选型为zllg65asm250-l中菱无刷直流轮毂电机,电机系统包括轮子、电机、减速机和编码器;电池单元中锂电池选型为ls-dl-24-40c松下锂电池;下位机控制器选型为stm32f407单片机;激光雷达选型为simo-ls-10h星秒单线激光雷达;红外传感器选型为yiya xlhw500cm光电对管;上位机控制器选型为i310代的工控机。
[0051]
本发明的有益效果为:环境适应能力强,不管是白天还是黑夜,能够24小时完成执行自主充电任务;充电效率高,采用单线激光雷达和红外传感器结合的方式,能够精确、快速识别充电桩,精准对接充电桩电极,提高充电效率;稳定性好,且方法简单、参数调试方便,有利于产品的快速开发;充电安全性高,设计了相应的决策控制与安全策略模块,使自主充电更加安全可靠;
附图说明
[0052]
图1为本发明的结构示意图。
[0053]
图2为发明机中巡检器人结构示意图。
[0054]
图3为本发明中充电桩的结构示意图。
[0055]
图4为本发明中决策控制流程示意图。
[0056]
图5为本发明中安全策略流程示意图。
[0057]
图6为本发明中流程示意图。
具体实施方式
[0058]
下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0059]
如图4、图5和图6所示:一种轻载室内巡检机器人自主充电方法,采用步骤为:
[0060]
步骤一:机器人导航至充电点位,识别充电桩并计算出充电桩在地图中的位置和姿势信息;
[0061]
采用单线激光雷达识别充电桩,如果检测机器人电量较低,则首先导航至充电桩前方的充电点位,订阅单线激光雷达的点云坐标数据(xn,yn);得到点云数据之后,寻找两点之间距离最近的一组点,经过筛选并采用最小二乘法拟将这些点合成线段,两个点云之间的距离d_poin计算公式为:
[0062][0063]
根据选定的一组激光点云坐标点(x1,y1)(x2,y2)
…
(xn,yn),将其进行拟合成一条线段,线段可根据直线的数学表达式得到:
[0064]
y=a0+a1x
[0065]
选定将残差的平方和sr最小作为“最佳”拟合准则,计算公式为:
[0066][0067]
然后从拟合的直线中判断是否有符合充电桩的“v”形结构的两条线段,充电桩线段的判断准则如下:
[0068]
拟合的线段如果小于0.1米,认为此线段不是充电桩线段;
[0069]
拟合的线段如果大于0.25米,认为此线段不是充电桩线段;
[0070]
拟合线段上的点到激光雷达的距离小于0.1米,认为此线段不是充电桩线段;
[0071]
拟合线段上的点到激光雷达的距离大于1.2米,认为此线段不是充电桩线段;
[0072]
如果线段上的点少于20个,认为此线段不是充电桩线段;
[0073]
如果线段上的点大于600个,认为此线段不是充电桩线段;
[0074]
根据以上充电桩线段判断规则,可以得到两条符合充电桩“v”形特征线段,设两条线段line_0和line_1的两个点坐标为(p0,p1)和(q0,q1),斜率分别为k0和k1,设goal_point为充电桩目标点,corner_point为充电桩“v”形结构角点,目标点goal_point到corner_point的距离dis_goal为0.25米,可以计算corner_point点坐标(l0,l1)为:
[0075][0076]
[0077]
充电桩目标点坐标(x,y)和位姿θ0为:
[0078][0079][0080][0081]
步骤二:根据机器人和充电桩的位置和姿势信息,调整机器人位置和姿势,使机器人的正负极对准充电桩的正负极;
[0082]
采用单线激光雷达和红外传感器判断机器人与充电桩的相对位置和姿态,并控制机器人移动,完成充电对接;
[0083]
在识别充电桩和得到充电桩的位置信息之后,此时能够通过订阅机器人的当前位置和姿态信息,并不断调整机器人的位姿,使机器人正对充电桩,具体调整方案分为三个步骤。
[0084]
2.1:机器人从充电点位开始移动,向前行驶,靠近充电桩,在距离充电桩前方约0.5米处停止运动;然后订阅机器人的姿态,如果机器人有姿态误差,则机器人原地左右旋转调整机器人姿态,确保机器人正对充电桩,即机器人的姿态和充电桩的姿态相同;
[0085]
2.2:在第一阶段结束后,此时机器人的头部是正对着充电桩,将机器人原地旋转180
°
,若机器人尾部的红外传感器接收到充电桩的红外数据,则机器人停止旋转;
[0086]
2.3:在第二阶段结束后,机器人的尾部正对着充电桩,此时控制机器人后退,直到与充电桩的电极对接,完成充电任务。
[0087]
在激光雷达坐标系下,已知充电桩的坐标(x,y),则机器人与充电桩之间的距离d和位姿θ计算公式:
[0088][0089][0090]
步骤三:检测充电过程是否出现异常情况,是则机器人停止运动,发出报警信息,否则进入下一步;
[0091]
3.1开始;
[0092]
3.2判断充电桩识别是否成功,是则进入下一步,否则进入步骤3.6;
[0093]
3.3判断充电桩前后是否有障碍物,是否进入下一步,是则进入步骤3.6;
[0094]
3.4判断是否有红外线信号,是则进入下一步,否则进入步骤3.6
[0095]
3.5执行充电任务,充电完成,结束;
[0096]
3.6机器人停止运动,发出报警信息,人工介入。
[0097]
步骤四:上位机发出控制信号,控制电机移动,执行自主充电。
[0098]
如图1、图2和图3所示:一种轻载室内巡检机器人自主充电方法的系统,设置有下位机控制器,该下位机控制器的第一控制端与电机系统连接,电池管理端与电池单元连接,第一采集端与激光雷达单元连接,第二采集端与红外传感器单元连接,通信端与上位机控
制器连接。
[0099]
所述下位机控制器与电机系统通过can协议进行通讯;所述下位机控制器与电池单元通过rs232进行通讯,红外传感器与下位机控制器通过单片机的io口控制;激光雷达通过udp协议给上位机控制器传输数据;下位机控制器与上位机控制器之间通过tcp协议进行数据传输。
[0100]
所述电机系统中的电机选型为zllg65asm250-l中菱无刷直流轮毂电机,电机系统包括轮子、电机、减速机和编码器;电池单元中锂电池选型为ls-dl-24-40c松下锂电池;下位机控制器选型为stm32f407单片机;激光雷达选型为simo-ls-10h星秒单线激光雷达;红外传感器选型为yiya xlhw500cm光电对管;上位机控制器选型为i310代的工控机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1