一种可飞行的高压线巡检装置的制作方法
1.本发明涉及一种可飞行的高压线巡检装置。
背景技术:
2.高压输电线路是电力系统的动脉,其安全运行越来越受到各级部门的重视;输电线路不仅要承受固有机械载荷和电力负荷的内部压力,而且还要经受自然环境中雨水、强风、腐蚀、雷击等各种外部侵害,随着时间的日积月累,势必导致线路上出现接触电阻增大、导线断股、避雷线断裂、绝缘子闪烁、金具脱落等故障,如不及时发现和消除,将对电力系统造成灾难性的危害;为保证输电线路安全稳定运行,需要对输电线路进行巡检以防止意外情况发生。
3.在我国超高压输电线路的巡检、维护基本上采用人工沿线逐塔巡视的作业方式,劳动强度大、费用多且危险性较高;电力部门迫切需要可以取代人力进行线路维护的巡检设备;研制巡检装置应用于超高压输电线路的巡检作业,不仅可以减轻巡检作业的劳动强度,降低费用,而且可以提高巡检作业质量和管理技术水平;迄今为止,国内外对于超高压输电线巡检装置的研究还处于研制阶段,尚无成熟的产品应用于输电线路巡检作业。
4.随着电力体制改革和电力运营市场化程度的提高,研制技术先进,性能优越的输电线路巡检装置已成为急需解决的问题,因而超高压输电线路的巡检装置具有强烈的市场需求,产业化前景广阔。
技术实现要素:
5.为解决现有技术的不足,本发明的目的在于提供一种可飞行的高压线巡检装置,能有效翻越间隔板的阻挡,提高巡线效率,减轻巡检人员的劳动强度并降低巡线成本。
6.本发明采取的技术方案为:一种可飞行的高压线巡检装置,其特征在于:主体四周对称设置有四个旋翼,每个旋翼中均设有一个可高速转动并提供升力的三叶桨,四个三叶桨的转速可单独调节,从而可使巡检装置实现在空中的移动和转动,主体下侧设有两个圆形凹槽;主体上侧前后两端各安装有两个支杆,四个支杆均可左右移动,每个支杆上端的斜板结构上均安装有一个电机和驱动轮,其中电机可实现对应驱动轮的转动和锁止定位,每个驱动轮上均安装有一个可自由转动的杆盘,驱动轮翻越间隔板时,杆盘可为巡检装置提供支撑;第四齿轮与主体前端的两个支杆均构成齿轮齿条啮合,第五齿轮与主体后端的两个支杆均构成齿轮齿条啮合,两个外轴分别转动安装于主体下侧的两个圆形凹槽中,两个內轴分别同轴安装于两个外轴内部,两个螺旋弹簧作为蓄能部件分别安装于两对內轴和外轴之间;第五电机通过齿轮啮合关系可同时驱动两个內轴的转动,两个內轴又可通过两个螺旋弹簧蓄能后分别驱动两个外轴的转动,两个外轴通过两个同步带可分别驱动第四齿轮和第五齿轮的转动,从而实现四个支杆的左右移动,进而使四个驱动轮实现对高压线路的夹持和放开;两个摄像头分别安装于主体前后两端,每个摄像头中均集成了光学高清镜头和红外高清镜头,可使巡检装置不受外界环境光线的限制;数据处理系统可将两个摄像头
采集的图像数据进行自动筛查和分析,并将可疑损伤点进行标注,供人工复查和分析。
7.优选地,四个驱动轮的结构相同,均为圆弧槽轮结构。
8.优选地,每个杆盘上侧周向均布设有六个外端向上倾斜的直杆。
9.优选地,每个直杆外端均安装有一个可自由转动的导向轮。
10.优选地,每个支杆上端斜板结构的外端均向上倾斜,从而使每个杆盘中旋转至下位的直杆始终为水平状态。
11.优选地,摄像头中两个镜头的视野角度均可进行电动调整。
12.本发明的有益效果:
①
四个旋翼的设置可使巡检装置具有较好的空中机动能力,能够飞到高压线路下侧的安装工位并进行自动安装和卸载,并不需要人工攀爬杆塔进行安装,减轻了巡检人员的工作强度,也能提高巡检人员的工作效率;
②
在线路上行走的巡检方式比全时滞空飞行的巡检方式能够节省更多的电量,并不需要旋翼时刻消耗电能来抵抗重力,因此本发明采用线路上行走的巡检方式可以有效延长工作时间,提高巡检效率,并降低巡检成本;
③
本发明中的巡检装置可以翻越高压线路中常见的间隔板,若遇到无法翻越的障碍时,可采用飞行模式对局部线路进行巡检,从而可实现对全线路无阻碍的巡检;
④
两个摄像头中均集成有光学高清镜头和红外高清镜头,在环境光线良好的条件下可采用光学高清镜头进行巡检,在环境光线昏暗的条件下可采用红外高清镜头进行巡检,从而可有效增强巡检装置的适应能力;
⑤
数据处理系统可将两个摄像头采集的图像数据进行自动筛查和分析,并将可疑损伤点进行标注,供人工复查和分析,极大地提高了巡检效率,降低巡检人员的工作负担,也能减少人为不确定因素对巡检结果的影响。
附图说明
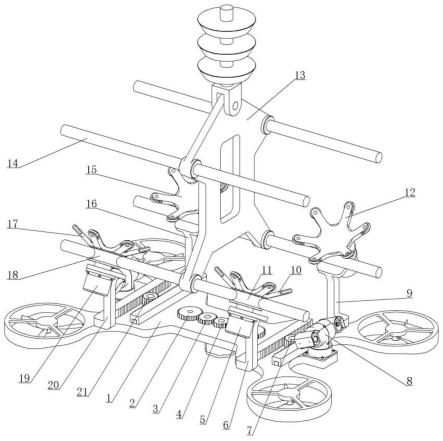
13.图1为本发明的整体结构示意图。
14.图2为本发明的整体结构示意图。
15.图3为本发明的前向局部剖面结构示意图。
16.图4为本发明的俯视局部剖面结构示意图。
17.图5为本发明的仰视整体结构示意图。
18.图6为驱动轮翻越间隔板时的示意图。
19.附图标号:1主体、1.1第一导轨、1.2第二导轨、1.3第三导轨、1.4第四导轨、2第三齿轮、3第二惰轮、4第一齿轮、5第二电机、6第二支杆、7第四齿轮、7.1第一带轮、8第一摄像头、9第一支杆、10第二杆盘、11第二驱动轮、12第一杆盘、13间隔板、14高压线、15第三杆盘、16第三支杆、17第四杆盘、18第四驱动轮、19第四电机、20第四支杆、21第五齿轮、21.1第四带轮、22第一惰轮、23第二齿轮、24第一电机、25第一驱动轮、26第三电机、27第三驱动轮、28第二摄像头、29第五电机、30第二內轴、31第二螺旋弹簧、32第一內轴、33第一外轴、33.1第二带轮、34第一螺旋弹簧、35第二外轴、35.1第三带轮、36第一同步带、37第二同步带。
具体实施方式
20.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
21.如图1、图2所示,一种可飞行的高压线巡检装置,主要包括主体1、第一支杆9、第二
支杆6、第三支杆16、第四支杆20、第一驱动轮25、第二驱动轮11、第三驱动轮27、第四驱动轮18、第一杆盘12、第二杆盘10、第三杆盘15、第四杆盘17、第一內轴32、第二內轴30、第一外轴33、第二外轴35、第一螺旋弹簧34、第二螺旋弹簧31、第一摄像头8、第二摄像头28,其中,主体1四周对称设置有四个旋翼,每个旋翼中均设有一个三叶桨,三叶桨在电机的驱动下可高速转动并为巡检装置提供向上的升力,四个三叶桨的转速可单独调节,从而可使巡检装置实现在空中的移动和转动,主体1上侧前端设有第一导轨1.1和第二导轨1.2,第一导轨1.1和第二导轨1.2为两个横向平行的导轨,主体1上侧后端设有第三导轨1.3和第四导轨1.4,第三导轨1.3和第四导轨1.4为两个横向平行的导轨,主体1下侧设有两个圆形凹槽。
22.如图2、图3所示,所述的第一支杆9下端为横向设置的横杆结构,横杆结构内部设有导槽,横杆结构后侧设有齿条结构,第一支杆9上端为竖杆结构,竖杆结构的顶端设有斜板结构,斜板结构的外端向上倾斜,第一支杆9下端的导槽与第一导轨1.1配合安装,从而第一支杆9可左右移动;第一电机24固定安装于第一支杆9顶端斜板结构的下侧,第一电机24内部集成有编码器和刹车结构,可实现精确的转动和刹车定位,第一驱动轮25为圆弧槽轮结构,第一驱动轮25安装于第一支杆9顶端斜板结构的上侧,并且第一驱动轮25与第一电机24的输出轴同轴紧固连接,从而第一电机24可实现第一驱动轮25的转动和锁止定位;第一杆盘12上侧周向均布设有六个直杆,且每个直杆外端均向上倾斜,每个直杆外端均安装有一个可自由转动的导向轮,第一杆盘12同轴安装于第一驱动轮25上端并构成转动副,从而第一杆盘12中旋转至下位的直杆始终为水平状态。
23.所述第二支杆6的结构与第一支杆9相同但安装方向成左右相反,第二支杆6下端的导槽与第二导轨1.2配合安装,从而第二支杆6可左右移动;第二电机5固定安装于第二支杆6顶端斜板结构的下侧,第二电机5内部集成有编码器和刹车结构,可实现精确的转动和刹车定位,第二驱动轮11为圆弧槽轮结构,第二驱动轮11安装于第二支杆6顶端斜板结构的上侧,并且第二驱动轮11与第二电机5的输出轴同轴紧固连接,从而第二电机5可实现第二驱动轮11的转动和锁止定位;第二杆盘10与第一杆盘12的结构相同,并且第二杆盘10同轴安装于第二驱动轮11上端并构成转动副,从而第二杆盘10中旋转至下位的直杆始终为水平状态。
24.如图2、图5所示,所述的第四齿轮7安装于主体1上侧前端并构成转动副,第四齿轮7位于第一支杆9下端的横杆结构和第二支杆6下端的横杆结构之间,且第四齿轮7同时与第一支杆9下端和第二支杆6下端的齿条结构啮合构成齿轮齿条传动结构;从而第四齿轮7顺时针转动可使第一支杆9和第二支杆6同时向中间移动,并使第一驱动轮25和第二驱动轮11对下侧两股平行的高压线路进行夹持;第四齿轮7逆时针转动可使第一支杆9和第二支杆6同时向两侧移动,并使第一驱动轮25和第二驱动轮11放开对下侧两股平行高压线路的夹持;第四齿轮7下端设有第一带轮7.1,第一带轮7.1为同步带轮结构并位于主体1下侧。
25.如图2所示,所述第三支杆16的结构与第一支杆9相同,第三支杆16下端的导槽与第三导轨1.3配合安装,从而第三支杆16可左右移动;第三电机26固定安装于第三支杆16顶端斜板结构的下侧,第三电机26内部集成有编码器和刹车结构,可实现精确的转动和刹车定位,第三驱动轮27为圆弧槽轮结构,第三驱动轮27安装于第三支杆16顶端斜板结构的上侧,并且第三驱动轮27与第三电机26的输出轴同轴紧固连接,从而第三电机26可实现第三驱动轮27的转动和锁止定位;第三杆盘15与第一杆盘12的结构相同,并且第三杆盘15同轴
安装于第三驱动轮27上端并构成转动副,从而第三杆盘15中旋转至下位的直杆始终为水平状态。
26.所述第四支杆20的结构与第三支杆16相同但安装方向成左右相反,第四支杆20下端的导槽与第四导轨1.4配合安装,从而第四支杆20可左右移动;第四电机19固定安装于第四支杆20顶端斜板结构的下侧,第四电机19内部集成有编码器和刹车结构,可实现精确的转动和刹车定位,第四驱动轮18为圆弧槽轮结构,第四驱动轮18安装于第四支杆20顶端斜板结构的上侧,并且第四驱动轮18与第四电机19的输出轴同轴紧固连接,从而第四电机19可实现第四驱动轮18的转动和锁止定位;第四杆盘17与第三杆盘15的结构相同,并且第四杆盘17同轴安装于第四驱动轮18上端并构成转动副,从而第四杆盘17中旋转至下位的直杆始终为水平状态。
27.如图2、图5所示,所述的第五齿轮21安装于主体1上侧后端并构成转动副,第五齿轮21位于第三支杆16下端的横杆结构和第四支杆20下端的横杆结构之间,且第五齿轮21同时与第三支杆16下端和第四支杆20下端的齿条结构啮合构成齿轮齿条传动结构;从而第五齿轮21顺时针转动可使第三支杆16和第四支杆20同时向中间移动,并使第三驱动轮27和第四驱动轮18对下侧两股平行的高压线路进行夹持;第五齿轮21逆时针转动可使第三支杆16和第四支杆20同时向两侧移动,并使第三驱动轮27和第四驱动轮18放开对下侧两股平行高压线路的夹持;第五齿轮21下端设有第四带轮21.1,第四带轮21.1为同步带轮结构并位于主体1下侧。
28.如图2、图4、图5所示,所述的第一外轴33为圆盘结构,第一外轴33下端设有第二带轮33.1,第二带轮33.1为同步带轮结构,第一外轴33通过一个轴承安装于主体1下侧前方的圆形凹槽中并构成转动副,第一外轴33内侧圆柱面上竖向设有一个矩形插口;所述的第一同步带36安装于第二带轮33.1与第一带轮7.1之间构成同步带传动结构;所述的第一內轴32同轴安装于第一外轴33内部并与主体1构成转动副,第一內轴32的外侧圆柱面上竖向设有一个矩形插口;所述的第一螺旋弹簧34安装于第一內轴32与第一外轴33之间的空隙中,并且第一螺旋弹簧34的两端分别固定安装于第一外轴33内侧的矩形插口和第一內轴32外侧的矩形插口中;所述的第二齿轮23安装于主体1上侧,并且第二齿轮23与第一內轴32上端同轴紧固连接,从而第二齿轮23与第一內轴32构成一个运动整体。
29.所述的第二外轴35为圆盘结构,第二外轴35下端设第三带轮35.1,第三带轮35.1为同步带轮结构,第二外轴35通过一个轴承安装于主体1下侧后方的圆形凹槽中并构成转动副,第二外轴35内侧圆柱面上竖向设有一个矩形插口;所述的第二同步带37安装于第三带轮35.1与第四带轮21.1之间构成同步带传动结构;所述的第二內轴30同轴安装于第二外轴35内部并与主体1构成转动副,第二內轴30的外侧圆柱面上竖向设有一个矩形插口;所述的第二螺旋弹簧31安装于第二內轴30与第二外轴35之间的空隙中,并且第二螺旋弹簧31的两端分别固定安装于第二外轴35内侧的矩形插口和第二內轴30外侧的矩形插口中;所述的第三齿轮2安装于主体1上侧,并且第三齿轮2与第二內轴30上端同轴紧固连接,从而第三齿轮2与第二內轴30构成一个运动整体。
30.如图2、图5所示,所述的第五电机29固定安装于主体1下侧中间位置,第一齿轮4安装于主体1上侧并与第五电机29的输出轴同轴紧固连接,第一惰轮22安装于主体1上侧并构成转动副,第一惰轮22与第一齿轮4和第二齿轮23同时啮合构成齿轮传动结构;第二惰轮3
安装于主体1上侧并构成转动副,第二惰轮3与第一齿轮4和第三齿轮2同时啮合构成齿轮传动结构;从而第五电机29驱动第一齿轮4顺时针转动时,在第一惰轮22的传动作用下,第二齿轮23顺时针转动,使第一螺旋弹簧34内端顺时针转动,第一螺旋弹簧34蓄能后带动第一外轴33顺时针转动,并通过第一同步带36驱动第四齿轮7顺时针转动,使第一驱动轮25和第二驱动轮11对下侧两股平行的高压线路进行夹持,与此同时,在第二惰轮3的传动作用下,第三齿轮2顺时针转动,使第二螺旋弹簧31内端顺时针转动,第二螺旋弹簧31蓄能后带动第二外轴35顺时针转动,并通过第二同步带37驱动第五齿轮21顺时针转动,使第三驱动轮27和第四驱动轮18对下侧两股平行的高压线路进行夹持;相反地,第五电机29驱动第一齿轮4逆时针转动后,四个驱动轮会放开对高压线路的夹持。
31.如图2所示,所述的第一摄像头8固定安装于主体1前端,第一摄像头8中集成了两个镜头,分别为光学高清镜头和红外高清镜头,两个镜头的视野角度均可进行电动调整,第二摄像头28的型号与第一摄像头8相同并固定安装于主体1后端。
32.巡检装置的安装过程:首先第五电机29逆时针旋转,使四个支杆分别向两侧移动,并使第一杆盘12和第二杆盘10的间距大于下侧两股平行高压线路的间距,同时第三杆盘15和第四杆盘17的间距大于下侧两股平行高压线路的间距;然后通过无线操控装置控制巡检装置飞临目标高压线路的下方,之后第五电机29顺时针转动,使四个驱动轮实现对下侧两股平行高压线路的夹持;巡检装置的卸载过程与安装过程步骤相反。
33.实施例:如图6所示,当第一驱动轮25和第二驱动轮11翻越间隔板13时,第一驱动轮25和第二驱动轮11会被间隔板13向两侧撑开,也即是第一支杆9和第二支杆6会向两侧移动,从而通过齿轮齿条传动结构和同步带传动结构使第一外轴33逆时针转动,使第一螺旋弹簧34的弹性势能增加,在巡检装置向前移动的过程中,第一杆盘12和第二杆盘10上直杆前端的导向轮接触到间隔板13后发生转动,使相邻两个直杆之间的间隙跨过间隔板13,其目的是在第一驱动轮25和第二驱动轮11失去对下侧两股平行高压线路的夹持作用后,第一杆盘12和第二杆盘10可通过其上设置的直杆勾住下侧两股平行高压线路,从而为巡检装置提供支撑力;当第一驱动轮25和第二驱动轮11越过间隔板13后,在第一螺旋弹簧34弹力的作用下,第一驱动轮25和第二驱动轮11会迅速向中间移动并继续夹持下侧两股平行高压线路;第三驱动轮27和第四驱动轮18翻越间隔板13的原理与上述相同。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1