一种旋转型压电超声电机及其驱动方法
1.本发明属于精密驱动元件技术领域,特别涉及一种旋转型压电超声电机及其驱动方法。
背景技术:
2.超声电机与传统电机相比,具有以下特点:结构简单、紧凑、转矩/体积比值大、低速大转矩、无需齿轮减速机构、可实现直接驱动、响应快(毫秒级)、断电自锁、分辨率高、在闭环控制下能获得高精度、不产生磁场、不受外界磁场干扰、形状可以多样化(圆的、方的、空心的、杆状的),等等。由于其独特的性能,超声电机在很多场合优于电磁电机,拥有广阔的应用前景,尤其是在需要快速响应和高精度位置控制的应用领域(譬如医学成像系统中光学元件的精密驱动),超声电机在运动行程、驱动力、驱动精度、响应速度和功率消耗等性能方面已显示出明显的优越性。在工业控制的领域,超声电机也逐渐得到更多的应用。美国专利us 4562374中公开的旋转型压电超声电机利用在环形弹性体中激发超声波频段的弯曲行波而驱动与之接触的转子产生旋转运动,弹性体定子的所有表面质点都作同等幅度的椭圆运动,其摩擦驱动界面的面积较大,因此能产生较大的驱动力矩,已被应用于驱动照相机镜头实现自动聚焦功能。这种环形定子中的弯曲行波由空间上相差1/4波长和相位相差90
°
的两个等幅的弯曲驻波叠加而产生。然而行波型超声电机定子的摩擦驱动界面上质点的椭圆运动轨迹形状不能随意调节(切向振幅和法向振幅的比值由定子几何尺寸决定),切向振幅和法向振幅只能同比例的增加或减小,导致电机在低速运行时不稳定,难以对其进行高精度的控制。
3.为了满足科学仪器、生物医疗、航空航天等产品对高精度致动器的需要,有必要发明一种新的旋转型压电超声电机及驱动方法。
技术实现要素:
4.本发明的目的在于:针对旋转型压电超声电机在实际使用中存在的各种弊端,提供一种新的旋转型压电超声电机及其驱动方法;能够对摩擦头的切向振幅和法向振幅分别独立调节,以提高控制精度。
5.本发明旋转型压电超声电机,采用的技术方案如下:
6.一种旋转型压电超声电机,包括定子、转子、轴承,定子包括底座、安装于底座上表面并沿圆周方向均匀分布的至少6个矩形截面柱状压电振子,每个压电振子上端设置一个凸起作为摩擦头所述定子中央位置设有轴向的通孔,通孔内安装轴承;
7.所述转子包括转盘、自转盘向下延伸的转轴,转轴套于轴承中,转盘下表面与定子上的所有摩擦头接触;
8.定子具有两个近似相等的共振频率的振动模态,为b-mode模态及l-mode模态;
9.当处于b-mode模态时,相邻两个压电振子作相互反向的弯曲振动;弯曲方向为沿所述圆周的切向;
10.当处于l-mode模态时,相邻两个压电振子作相互反向的纵向伸缩振动。
11.进一步的,所述每个压电振子的结构相同,压电振子包括金属弹性体、分别覆盖于金属弹性体内侧面及外侧面的两个压电片;压电片与金属弹性体粘接的一面为全覆盖的内表面电极,压电片背对金属弹性体的一面为2个中间分隔开的金属电极区,该2个金属电极区作为第二电极和第三电极,压电片被第二电极和第三电极覆盖的部分都沿厚度方向同向极化;同一个压电振子的2个压电片的极化方向相反;内表面电极与底座导通作为接地电极;当第二电极和第三电极施加同相位的接近于共振频率的交流电压时激发出定子l-mode模态,当第二电极和第三电极施加反相的接近共振频率的交流电压时激发出定子b-mode模态。
12.进一步的,所述每个压电振子的结构相同,压电振子包括压电陶瓷与金属电极共烧形成的叠层压电陶瓷柱及位于叠层压电陶瓷柱顶端的摩擦头;该叠层压电陶瓷柱包括若干个并排排列的片状压电陶瓷,两个相邻片状压电陶瓷之间夹有第一电极或电极组,电极组包括中间分隔开的第二电极与第三电极,若干第一电极与若干电极组交错的插入在若干片状压电陶瓷之间,其中第一电极接地,当第二电极和第三电极施加同相位的接近于共振频率的交流电压时激发出定子l-mode模态,当第二电极和第三电极施加反相的接近共振频率的交流电压时激发出定子b-mode模态。
13.进一步的,所述柱状压电振子的数量为偶数2n,n≥3。
14.有益效果:本发明提供的旋转型压电超声电机的定子摩擦驱动头的切向振幅和法向振幅可分别独立调节;当需要电机低速运转时,应控制定子的振动使其摩擦头切向振幅减小,而同时维持法向振动的幅值,即在降低速度的同时能保持较大的驱动力;能改善超声电机的低速运行稳定性,提高运动控制的精度。
15.而上述旋转型压电超声电机的驱动方法可采用以下技术方案:
16.将接地电极接地,第二电极和第三电极分别施加接近于共振频率的交流电压v1=vsin(2πfdt)和压电振子上端的摩擦头产生微幅椭圆运动,由于摩擦力的作用导致转子转动;其中v为电压的幅值,fd为频率,t为时刻,为相位差。
17.通过改变所施加电压的幅值v、频率fd、和相位差来调整摩擦头椭圆运动的振幅,从而改变电机的驱动力和转速。
附图说明
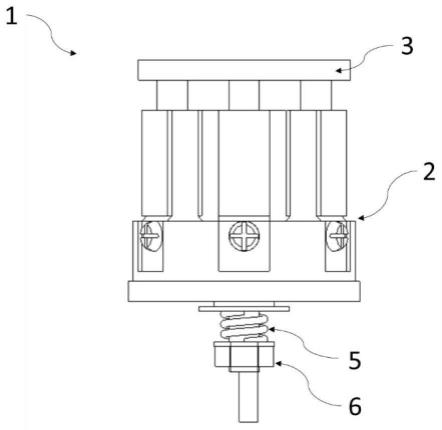
18.图1为本发明实施例旋转型压电超声电机的整体结构示意图。
19.图2为图1中旋转型压电超声电机的分解图。
20.图3为所述电机定子的整体结构示意图。
21.图4为图3中电机定子的分解图。
22.图5为所述电机定子的固有振动模态b-mode的侧视仿真示意图。
23.图6为所述电机定子的固有振动模态b-mode的俯视仿真示意图。
24.图7为所述电机定子的固有振动模态l-mode的侧视仿真示意图。
25.图8为所述电机定子的固有振动模态l-mode的俯视仿真示意图。
26.图9为所述一种压电振子的结构示意图。
27.图10为所述压电片表面电极的示意图。
28.图11为本发明旋转型压电超声电机的驱动方法示意图。
29.图12为另一种压电振子的结构示意图。
30.图13为图12中叠层压电陶瓷柱的内部层间电极和外侧面电极示意图。
31.图14为图12中压电振子外侧面电极及接地示意图。
32.图15为利用叠层压电陶瓷柱的超声电机的驱动方法示意图。
33.图16为电机定子振幅随驱动电压频率变化的关系的示意图。
34.图17是用矢量表示施加于压电元件的电压与振动模式之间的关系的示意图。
35.图18为电机定子振幅随驱动电压|v1+v2|和|v
1-v2|变化的关系的示意图(驱动频率不变)。
36.图19是电机定子摩擦头端部的运动轨迹在zθ平面内的投影的示意图。
具体实施方式
37.为了使本发明的技术方法和优点更加清楚,下面将结合附图对本发明做进一步的详细说明。
38.如图1及图2所示,本发明提供一种旋转型压电超声电机1,包括一个定子2、一个转子3、两个轴承4、和预压力装置。
39.如图3及图4所示,为所述定子2的结构,包括底座21、安装于底座上表面沿圆周方向均匀分布的6个矩形截面柱状压电振子22-1、22-2、22-3、22-4、22-5、22-6,每个压电振子上端设置一个凸起作为摩擦头224并与转子3接触。
40.在本实施方式中,采用6个柱状压电振子的设置。而在其他实施方式中,柱状压电振子的数量可以为2n,n≥3个,即大于等于6个的偶数个柱状压电振子均可以用于实施本发明的技术方案。在本实施例中,以6个柱状压电振子的设置为较佳实施例进行技术方案的说明。
41.所述定子2有一个轴向的通孔,其下端部安装一个轴承4-1,其上端部安装一个轴承4-2。
42.所述转子3包括一个转盘31和一根转轴32。转轴32插入所述的两个轴承4中,转盘31与所述定子2上的6个摩擦头224接触。
43.所述弹性预压力装置为一个弹簧5和一个螺母6,螺母6安装于转子3的轴上,套在转子轴上并被压缩的弹簧5位于轴承4-1和螺母6之间。弹簧5的作用力使转子3与定子2保持接触。
44.通过设置压电振子22的尺寸使其弯曲振动模态和纵向伸缩振动模态具有重合的共振频率。相应地,定子2具有两个振动模态,其中一个共振频率为fb的模态(b-mode)的振形(见图5和图6)第1、3、5个压电振子22-1、22-3、22-5和第2、4、6个压电振子22-2、22-4、22-6作反向的弯曲振动(弯曲方向沿圆周切向,摩擦头端部的振幅切向分量如图6中a
θ
所示),另一个共振频率为f
l
的模态(l-mode)的振形(见图7和图8)第1、3、5个压电振子22-1、22-3、22-5和第2、4、6个压电振子22-2、22-4、22-6作反向的纵向伸缩振动(摩擦头端部的振幅轴向分量如图7中az所示),这两个共振频率近似相等(fb≈f
l
)。
45.图9为所述压电振子22的结构,包括一个金属弹性体221(由磷青铜等高机械品质因子的材料制成)和2个压电片222(由压电陶瓷或压电单晶材料制成),压电片222与金属弹
性体221粘接组装。
46.图10为所述压电片222表面电极(一层薄的导电金属)的示意图。压电片222与金属弹性体221粘接的一面为全覆盖的电极222a,另一面为2个分隔开的金属电极区222b,压电片两个部分都沿厚度方向同向极化。压电材料的极化处理属于材料预处理,是通过在铁电型压电材料表面金属电极上施加直流高电压并保持一段时间,使电偶极子转向为一致排列,经处理后压电材料发生了永久变化。
47.图11为本发明实施例旋转型压电超声电机1的驱动方法。所述压电片222的极化方向如图中箭头方向所示,同一个压电振子21的2个压电片的极化方向相反,相邻两个压电振子21的压电片的极化方向相反。所有压电片222与金属弹性体221粘接的内表面电极222a(共12个)都与定子底座21(由金属材料制成)导通,定义为第一电极,驱动时接地。压电片222的外表面电极区222b(共24个)按左右方位分为2组,分别定义为第二电极和第三电极。第二和第三电极施加同相位的接近于共振频率的交流电压时能激发出定子l-mode,当施加反相(相位差为180
°
)的接近共振频率的交流电压时能激发出定子b-mode。驱动所述旋转型压电超声电机1工作时,将第一电极接地,第二和第三电极分别施加接近于共振频率的交流电压v1=vsin(2πfdt)和压电振子上端的摩擦头产生微幅椭圆运动,由于摩擦力的作用导致转子转动。
48.图12显示了本发明的另一种实施方法:压电振子22包括叠层压电陶瓷柱223和摩擦头224,摩擦头224与叠层压电陶瓷柱223粘接组装。摩擦头224由耐磨材料(譬如高致密al2o3、zro2陶瓷等)制成。叠层压电陶瓷振子22与所述金属底座21粘接组装成所述的超声电机定子2。叠层压电陶瓷振子22与图9所示实施例金属弹性体-压电片复合振子22的区别在于:叠层压电陶瓷柱223是由许多压电陶瓷薄片(譬如pb(zr,ti)o3陶瓷,几十至几微米厚)堆叠组成,可通过陶瓷/金属内电极低温共烧技术制备,具有驱动电压低、电致应变大、能在低频非谐振状态工作的优点,但共烧制备的陶瓷层间结合强度较低,在大幅度振动下容易损坏。
49.图13和图14分别为图12所示叠层压电陶瓷柱223的内部层间电极和外侧面电极示意图。外侧面电极与内部层间电极导通,按物理连接可分为3组电极,其中一个电极接地。
50.图15为利用所述利用叠层压电陶瓷柱223的超声电机的驱动方法示意图,与图11所示驱动方法类似。叠层压电陶瓷柱223的极化方向用符号“+”和
“‑”
标示(单层陶瓷沿厚度方向极化,由“+”电极指向
“‑”
电极)。
51.图16为电机定子振幅a随驱动电压频率fd变化的关系的示意图。实线为定子摩擦头l-mode振幅轴向分量az,虚线为定子摩擦头b-mode振幅沿圆周切向的分量a
θ
。驱动频率fd稍高于共振频率f
l
和fb,δf为驱动频率可用带宽。
52.图17是用矢量表示施加于压电元件的电压与振动模式之间的关系的示意图。v1+v2代表激励l-mode振动模式的电压,v
1-v2代表激励b-mode振动模式的电压。按照之前的描述,所施加的两个交流电压具有相等的幅值,则v1+v2和v
1-v2两矢量将保持正交(即相位差为90
°
)。v1+v2的幅值为的幅值为v
1-v2的幅值为
53.图18为电机定子振幅随驱动电压|v1+v2|和|v
1-v2|变化的关系的示意图(驱动频率不变)。振幅随电压增加而变大,图中的直线段反映低电压范围的线性比例关系,高电压
范围内振幅逐渐饱和(图中未画出)。实线为定子摩擦头l-mode振幅轴向分量az=k
l
(f)|v1+v2|,虚线为定子摩擦头b-mode振幅沿圆周切向的分量a
θ
=kb(f)|v
1-v2|,k
l
(f)和kb(f)是与驱动频率有关的常数。相应的,摩擦头端部的运动轨迹为一个椭圆,其在zθ平面内的投影如图19所示。从以上分析可知,可通过改变所施加电压的幅值v、频率fd、和相位差来调整摩擦头椭圆运动的振幅,从而改变电机的驱动力和转速。当需要电机低速运转时,应控制定子的振动使其摩擦头切向振幅a
θ
减小,而同时维持法向振动的幅值az,即在降低速度的同时能保持大的驱动力。结合本发明的压电超声电机和驱动方法,可控制电压的幅值v和相位差保持不变,即能维持法向振动的幅值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1