基于磁链控制的构网型双馈风电机组自同步并网方法
1.本发明涉及风力发电领域,具体涉及一种优化双馈风电机组弱电网稳定运行与主动支撑能力的控制方法。
背景技术:
2.随着我国能源结构优化不断深入,风能作为清洁可再生能源得到广泛开发与利用,在风力发电建设中双馈风电机组由于低成本、高效率等优势应用广泛。然而在高比例风电集中并网、升压外送场景,较长的输电线路造就双馈风电机组并网点呈现高阻抗的弱电网特征,并网点电压波动频繁;同时基于电力电子接口的高比例风电并网降低系统等效惯量,电网频率稳定性降低。传统双馈风电机组跟随外界电网状态运行,对电网电压/频率支撑的能力不足,同时弱电网下双馈风电机组振荡失稳风险增加,威胁风力发电系统运行稳定与电网电压/频率稳定,双馈风电机组的弱电网稳定性与主动支撑能力亟待提升。
3.针对双馈风电机组并网控制在主动支撑以及弱电网稳定性提升方面存在的难题,现有的解决方案是在双馈风电机组有功功率指令中引入与电网频率变化率相关的附加有功指令,基于附加惯量控制降低电网频率变化速率。然而弱电网下锁相环频率检测受复杂干扰影响,必须对检测电网频率变化率进行低通滤波,影响主动支撑速度。此外,弱电网下双馈风电机组转子电流控制与锁相环动态耦合加剧,机组小干扰振荡风险增加,因此难以满足主动支撑速度与弱电网稳定性两方面的要求。为此,需要重新构建弱电网稳定性与主动支撑能力兼备的双馈风电机组并网控制方案。
技术实现要素:
4.本发明为克服现有技术存在的不足之处,提出一种基于磁链控制的构网型双馈风电机组自同步并网方法,以期在保障双馈风电机组弱电网稳定性的同时,削弱电网中谐波电压与异常电压波动对双馈风电机组运行状态的干扰,使其能依据并网点的电压/频率波动自适应输出有功、无功功率,从而能优化系统主动支撑能力。
5.本发明为达到上述发明目的,采用如下技术方案:
6.本发明一种基于磁链控制的构网型双馈风电机组自同步并网方法的特点是应用于由双馈风机、转子侧变流器所组成的双馈风力发电系统中,并按如下步骤进行:
7.步骤1、采集双馈风机定子电流i
sa
、i
sb
、i
sc
与定子电压u
sa
、u
sb
、u
sc
,将带入式(1)所示的坐标变换环节,获得定子电流在同步旋转坐标系下的直流分量i
sd
、i
sq
以及定子电压在同步旋转坐标系下的直流分量u
sd
、u
sq
,并依据式(2)对上述直流分量进行运算,得到双馈风机定子侧输出的瞬时有功功率ps与瞬时无功功率qs:
8.[0009][0010]
式(1)和式(2)中,θ为坐标变换的定向角度,xa、xb、xc代表双馈风机在三相静止坐标系下的定子电压/电流,xd、xq代表定子电压/电流在同步旋转坐标系下的直流分量;
[0011]
步骤2、采集双馈风机的转子电流i
ra
、i
rb
、i
rc
与转子电角速度θm,将其带入式(3)所示的坐标变换环节,获得转子电流在同步旋转坐标系下的直流分量i
rd
、i
rq
:
[0012][0013]
式(3)中,θ为坐标变换的定向角度;
[0014]
步骤3、利用式(4)对定子电流与转子电流的直流分量i
sd
、i
sq
、i
rd
、i
rq
进行线性叠加运算,得到双馈风机的定子磁链ψ
sd
、ψ
sq
,对ψ
sd
进行微分计算获得微分信号dψ
sd
/dt,再利用式(5)获得转子电流内环的补偿指令δi
rd*
:
[0015][0016][0017]
式(4)和式(5)中,ls、lm分别为双馈风机在同步旋转坐标系下的定子自感与定转子互感,rs为定子电阻,kd为补偿系数,τ为低通滤波时间常数;s表示拉普拉斯算子;
[0018]
步骤4、计算有功指令p
ref
与输出瞬时有功功率ps的偏差δp,并将偏差δp输入有功功率控制器apc,获得定子磁链矢量控制角θ
ref
,将θ
ref
作为所述坐标变换的定向角度θ;
[0019]
步骤5、计算无功指令q
ref
与输出瞬时无功功率qs的偏差δq,并将偏差δq输入无功功率控制器rpc,获得定子磁链幅值指令ψ
ref
,令定子磁链外环指令满足式(6):
[0020][0021]
式(6)中,ψ
sd*
、ψ
sq*
分别为d轴、q轴定子磁链外环的指令信号;
[0022]
步骤6、将d轴定子磁链指令ψ
sd*
与d轴定子磁链ψ
sd
的偏差、q轴定子磁链指令ψ
sq*
与q轴定子磁链ψ
sq
的偏差分别输入定子磁链外环的pi调节器,获得dq坐标系下的转子电流内环的指令i
rd*
、i
rq*
,再将d轴定子磁链外环pi调节器输出的指令i
rd*
与补偿指令δi
rd*
叠加后获得新的转子电流指令i
rd1*
;
[0023]
步骤7、计算dq坐标系下新的转子电流指令i
rd1*
与转子电流反馈i
rd
之间的偏差以及指令i
rq*
与i
rq
之间的偏差,并分别输入转子电流内环的pi调节器中,相应得到dq坐标系下的转子电压指令u
rd*
、u
rq*
,再经过svpwm环节的调制后,生成转子侧变流器开关管控制信号s1-s6,从而实现双馈风电机组的自同步并网控制。
[0024]
与现有技术相比,本发明达到的有益效果是:
[0025]
1、本发明提出一种采用定子磁链外环-转子电流内环的双闭环结构,能够保障转子电流以及并网电流质量,同时精准控制定子磁链矢量的幅值相位。相比于传统方案能够
更好抵抗弱电网下的并网点电压谐波干扰,从而提升了双馈风机并网电压质量。
[0026]
2、本发明在构建定子磁链-转子电流双闭环结构的同时,结合功率控制器apc、rpc实现双馈风电机组的自同步并网控制。相比传统方案弱电网稳定性更好,同时提供适应电网频率/电压状态的有功、无功支撑。
[0027]
3、本发明在转子电流指令中引入定子d轴磁链的微分负反馈信号,可以抑制双馈风电机组在无功指令阶跃下的无功振荡与冲击,优化系统在弱电网下的阻尼特性,从而进一步提升了双馈风电机组的弱电网稳定裕度。
附图说明
[0028]
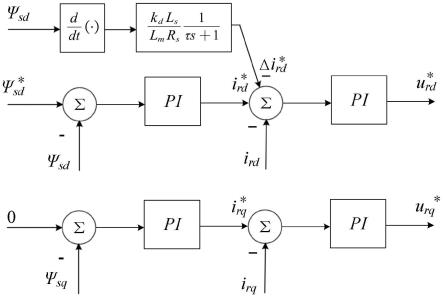
图1为本发明双馈风力发电系统中定子磁链-转子电流双闭环结构对应控制框图;
[0029]
图2为本发明定子磁链-转子电流双闭环结构作用于转子侧变流器控制的结构示意图。
具体实施方式
[0030]
下面结合附图对本发明的具体实施方式作进一步的详细说明。
[0031]
本实施例中,一种基于磁链控制的构网型双馈风电机组自同步并网方法,是应用于由双馈风机、转子侧变流器所组成的双馈风力发电系统中,用于提升双馈风电机组的弱电网稳定裕度与主动支撑能力,并按如下步骤进行:
[0032]
步骤1、如图2所示,采集双馈风机定子电流i
sa
、i
sb
、i
sc
与定子电压u
sa
、u
sb
、u
sc
,将带入式(1)所示的坐标变换环节,获得定子电流在同步旋转坐标系下的直流分量i
sd
、i
sq
以及定子电压在同步旋转坐标系下的直流分量u
sd
、u
sq
,并依据式(2)对上述直流分量进行运算,得到双馈风机定子侧输出的瞬时有功功率ps与瞬时无功功率qs:
[0033][0034][0035]
式中,θ为坐标变换的定向角度,xa、xb、xc代表双馈风机在三相静止坐标系下的定子电压/电流,xd、xq代表定子电压/电流在同步旋转坐标系下的直流分量;
[0036]
步骤2、采集图2所示双馈风机的转子电流i
ra
、i
rb
、i
rc
与转子电角速度θm,将其输入式(3)所示的坐标变换环节,获得转子电流在同步旋转坐标系下的直流分量i
rd
、i
rq
:
[0037][0038]
式(3)中,θ为坐标变换的定向角度;
[0039]
步骤3、将步骤1、2中获得的定子电流与转子电流的直流分量i
sd
、i
sq
、i
rd
、i
rq
进行式(4)所示的线性叠加运算,得到双馈风机的定子磁链ψ
sd
、ψ
sq
,对ψ
sd
进行微分计算获得微分信号dψ
sd
/dt,并利用式(5)获得转子电流内环的补偿指令δi
rd*
:
[0040][0041][0042]
式(4)和式(5)中,ls、lm分别为双馈风机在同步旋转坐标系下的定子自感与定转子互感,rs为定子电阻,kd为补偿系数,τ为低通滤波时间常数;s表示拉普拉斯算子。这里计算得到的转子电流补偿指令δi
rd*
与定子磁链ψ
sd
的微分信号呈负相关关系,目的是当定子磁链幅值产生振荡时利用呈相反趋势变化的转子电流平衡定子磁链波动,低通滤波环节“1/(τs+1)”用于消除定转子电流检测与定子磁链微分运算中产生的噪声干扰;
[0043]
步骤4、计算有功指令p
ref
与输出瞬时有功功率ps的偏差δp,将偏差δp输入有功功率控制器apc,图2所示,可在apc输出端口叠加前馈频率信号ω
s0
获得参考频率指令ω
ref
,用于提升有功响应动态,ω
ref
经积分运算得到定子磁链矢量控制角θ
ref
,将θ
ref
作为式(1)和式(3)所示坐标变换的定向角度θ;
[0044]
步骤5、计算无功指令q
ref
与输出瞬时无功功率qs的偏差δq,将偏差δq输入无功功率控制器rpc,如图2所示,可在rpc输出端口叠加前馈磁链信号ψ
s0
获得参考定子磁链指令ψ
ref
,用于提升无功响应动态,令定子磁链外环指令满足:
[0045][0046]
式中,ψ
sd*
、ψ
sq*
分别为d轴、q轴定子磁链外环的指令信号;
[0047]
步骤6、将d轴定子磁链指令ψ
sd*
与d轴定子磁链ψ
sd
的偏差、q轴定子磁链指令ψ
sq*
与q轴定子磁链ψ
sq
的偏差分别输入定子磁链外环的pi调节器,获得dq坐标系下的转子电流内环的指令i
rd*
、i
rq*
,再将d轴定子磁链外环pi调节器输出的指令i
rd*
与补偿指令δi
rd*
叠加后获得新的转子电流指令i
rd1*
;
[0048]
步骤7、比较dq坐标系下的转子电流指令i
rd1*
、i
rq*
与转子电流反馈i
rd
、i
rq
,将其偏差分别输入转子电流内环的pi调节器,得到dq坐标系下的转子电压指令u
rd*
、u
rq*
,经svpwm环节进行调制,生成转子侧变流器开关管控制信号s1-s6,实现双馈风电机组自同步并网控制.
[0049]
图1即为步骤3、步骤6、步骤7所得定子磁链-转子电流双闭环结构的控制框图,转子电流内环的两个pi控制器用于实现转子电流的快速无静差跟踪控制,q轴定子磁链外环中的pi用于实现定子磁链矢量相位对指令角度θ
ref
的无静差跟踪,d轴定子磁链外环中的pi用于实现定子磁链幅值与输出无功控制,其中输出叠加的转子电流补偿指令δi
rd*
用于抑制定子磁链振荡现象。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1