一种基于优化BP神经网络的永磁同步电机参数辨识方法
一种基于优化bp神经网络的永磁同步电机参数辨识方法
技术领域
1.本发明属于电机参数辨识技术领域,尤其涉及一种基于优化bp神经网络的永磁同步电机参数辨识方法。
背景技术:
2.永磁同步电机因具有高效率、高转矩电流比、高功率密度、可靠性等优点,已在电动汽车、航空工业等领域得到了广泛应用。在永磁同步电机的控制过程中,闭环控制、减小运行损耗方法以及无传感器控制等方面,都比较依赖永磁同步电机自身参数,输入不准确参数的控制会导致永磁同步电机闭环控制效果差,系统波动大;引起减小运行损耗方法效果不佳导致电机损耗增大;无传感器控制中如果电机参数输入不准确,会引起电机运行不畅甚至无法运行。因此高精度的永磁同步电机参数辨识方法是很有必要的。
3.目前多采用参数辨识方法包括最小二乘法、模型参考自适应法、神经网络法等。其中,最小二乘法的参数辨识无法实现多参数同时辨识,在辨识某一参数时,其他参数是假定为已知值,因此最小二乘法参数辨识的辨识效果较差,在对电机参数有较高要求的领域难以胜任;模型参考自适应法一定程度上解决了最小二乘法无法同时实现多参数辨识的问题,且参数辨识精度更高,但是需要进行大量的公式推导和计算,同时还需要人工调节模型参考自适应的自适应律以及搭建精准的电机控制参考模型和可调模型,使用不够便捷;神经网络法无需进行复杂的公式推导及计算,也无需搭建精准的电机模型,使用方便,且电机参数辨识结果远好于其他方法,但是存在辨识初始阶段波动较大,鲁棒性较差,辨识速度慢等问题。
技术实现要素:
4.本发明所要解决的技术问题是提供一种基于改进鲸鱼优化算法优化bp神经网络的永磁同步电机参数辨识方法,以解决现有技术中存在的无法进行多参数辨识、需要进行复杂的公式推导及运算、人工调节自适应律、需要搭建精确模型等问题。
5.为解决以上技术问题,本发明的技术方案为:提供一种基于优化bp神经网络的永磁同步电机参数辨识方法,其创新点在于:具体包括以下步骤:
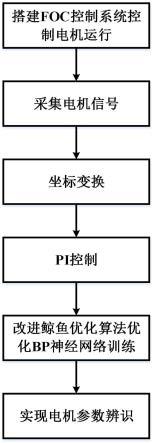
6.(1)搭建foc控制系统控制已知参数永磁同步电机运行:根据永磁同步电机foc矢量控制方法搭建foc控制系统,并控制电机在小于该电机最大转矩、最大转速的工况下运行;
7.(2)采集电机运行信号:通过电流传感器检测永磁同步电机的三相电流ia、ib、ic;通过转速传感器检测电机的机械角速度ωm,通过计算得到电机电角速度ωe;通过位置传感器检测电机机械角度θm,通过计算得到电机电角度θe;
8.(3)坐标变换:将步骤(2)得到的电机的三相电流ia、ib、ic通过clarke变换转化为静止坐标系下的电流i
α
、i
β
,再通过park变换转化为同步旋转坐标系下的电流id、iq;
9.(4)pi控制:将步骤(2)得到的电角速度ωe和参考转速ω
e_ref
输入速度环pi模块,
速度环pi模块输出q轴电流参考值至q轴电流环pi模块;将参考电流i
d_ref
输入d轴电流环pi模块,同时将步骤(3)得到的同步旋转坐标系下的电流id、iq分别输入d轴电流环pi模块以及q轴电流环pi模块进行计算,d轴电流环pi模块以及q轴电流环pi模块分别输出d轴电压ud和q轴电压uq;
10.(5)改进鲸鱼优化算法优化bp神经网络训练:改进鲸鱼优化算法优化bp神经网络tcwoa-bpnn,bp神经网络tcwoa-bpnn由输入层、隐含层及输出层构成,使用改进的鲸鱼优化算法获取bp神经网络的初始权值和阈值,将步骤(3)所得到的d、q轴电流id、iq、步骤(4)得到的d、q轴电压ud、uq以及步骤(2)得到的电机电角速度ωe作为tcwoa-bpnn的输入,将步骤(1)中所述的已知参数的永磁同步电机参数作为输出,进行训练,获得用于永磁同步电机参数辨识的bp神经网络tcwoa-bpnn;
11.(6)实现电机参数识别:将未知参数的永磁同步电机使用foc控制系统控制运行,重复步骤(2)、步骤(3)和步骤(4),将得到的数据id、iq、ud、uq、ωe输入至步骤(5)得出的bp神经网络tcwoa-bpnn中,即可输出永磁同步电机pmsm的各项参数,则完成对永磁同步电机的参数识别。
12.进一步的,所述步骤(1)中根据永磁同步电机foc矢量控制方法搭建foc控制系统包括速度环pi模块、q轴电流环pi模块、d轴电流环pi模块、clarke变换模块、park变换模块,svpwm模块、逆park变换模块,逆变器、永磁同步电机pmsm模块、电流传感器、速度/位置传感器、tcwoa-bpnn参数辨识模块;还包括需要给定速度环pi模块的参考转速ω
e_ref
以及d轴电流环pi模块的参考电流i
d_ref
;
13.所述逆变器和永磁同步电机pmsm模块连接来驱动永磁同步电机pmsm模块运行,所述电流传感器模块设于逆变器和永磁同步电机pmsm模块之间来采集逆变器输出到永磁同步电机pmsm模块的三相电流ia、id、ic并输出到clark变换模块进行运算;
14.所述clark变换模块分别和park变换模块、速度/位置传感器连接,用于将三相电流ia、id、ic通过clark变换模块得到的静止坐标系下的电流i
α
、i
β
分别输入park变换模块、速度/位置传感器中;
15.所述速度/位置传感器分别与速度环pi模块、park变换模块、逆park变换模块、永磁同步电机pmsm模块连接,从永磁同步电机pmsm模块采集永磁同步电机机械角速度ωm并计算得到电角速度ωe,输入速度环pi模块对永磁同步电机转速进行控制;从永磁同步电机pmsm模块采集永磁同步电机机械角度θm并计算得到电角度θe,分别输入park变换模块、逆park变换模块参与计算;
16.所述速度环pi模块将永磁同步电机电角速度ωe以及参考转速ω
e_ref
进行运算得到q轴电流参考值iq*,输入到q轴电流环pi模块;
17.所述park变换模块分别与q轴电流环pi模块、d轴电流环pi模块连接;所述park变换模块将静止坐标系下的电流i
α
、i
β
以及速度/位置传感器得到的电角度θe输入进行运算转换为同步旋转坐标系下的电流id、iq;将id、iq分别输入到d轴电流环pi模块以及q轴电流环pi模块,完成永磁同步电机d、q轴电流控制;
18.所述q轴电流环pi模块将q轴电流参考值iq*以及iq进行运算得到uq,所述d轴电流环pi模块将输入的参考电流i
d_ref
以及id进行运算得到ud;
19.所述逆park变换模块分别与q轴电流环pi模块、d轴电流环pi模块、svpwm模块连
接,用于将从q轴电流环pi模块和d轴电流环pi模块输出的uq、ud以及速度/位置传感器得到的电角度θe输入进行运算,得到静止坐标系下的电压u
α
、u
β
并输入svpwm模块;
20.所述svpwm模块和逆变器模块连接,用于将静止坐标系下的电压u
α
、u
β
输入到svpwm模块运算,得到三相电压ua、ub、uc,并输入到逆变器模块;
21.所述tcwoa-bpnn参数辨识模块与park变换模块、d轴电流环pi模块、q轴电流环pi模块以及速度/位置传感器模块连接,将id、iq、ud、uq、ωe输入tcwoa-bpnn参数辨识模块中,tcwoa-bpnn参数辨识模块计算输出永磁同步电机的线电阻rs、d轴电感ld、q轴电感lq以及磁链ψf。
22.进一步的,所述逆park变换描述如下:
23.通过逆park变换将同步旋转坐标系下的电压ud、uq转化为静止坐标系下的电压u
α
、u
β
,具体方法为:
24.u
α
=udcosθ
e-uqsinθe25.u
β
=udsinθe+uqcosθe。
26.进一步的,所述步骤(1)中已知参数永磁同步电机所需要已知的参数包括同步旋转坐标系下的d轴电感ld、q轴电感lq、永磁同步电机极对数p、永磁同步电机线电阻rs、永磁同步电机磁链ψf、永磁同步电机的转动惯量j、阻尼系数b。
27.进一步的,所述步骤(2)中转速传感器检测电机的机械角速度ωm,通过计算得到的电机电角速度ωe的具体方法为:
28.ωe=p*ωm29.通过位置传感器检测电机机械角度θm,并通过计算得到的电机电角度θe,其具体方法为:
30.θe=p*θm31.其中,p表示永磁同步电机pmsm极对数。
32.进一步的,所述步骤(3)中,clarke变换、park变换描述如下:
33.将电机的三相电流ia、ib、ic通过clarke变换转化为静止坐标系下的电流i
α
、i
β
的具体方法为:
[0034][0035][0036]
将静止坐标系下的电流i
α
、i
β
通过park变换转化为同步旋转坐标系下的电流id、iq的具体方法为:
[0037]
id=i
α
cosθe+i
β
sinθe[0038]iq
=-i
α
sinθe+i
β
cosθe。
[0039]
进一步的,所述步骤(5)中,改进鲸鱼优化算法优化bp神经网络训练tcwoa-bpnn,使用改进的鲸鱼优化算法获取bp神经网络的初始权值和阈值具体步骤如下:
[0040]
a、鲸鱼优化算法的改进包括tent混沌映射以及精英学习机制,tent混沌映射表示为:
[0041][0042]
式中x0为鲸鱼优化算法种群中的初始个体,xn和x
n+1
为种群中生成的第n个个体和第n+1个个体,rand[0,1]表示从0到1之间取随机数,精英学习机制表示为:
[0043]
xc=j
·k·
[x
i-x
*
]
[0044][0045]
式中xc为鲸鱼优化算法生成的精英个体,j和k为随机参数值,xi为当前鲸鱼优化算法种群中的个体,x
*
为种群中当前位置最优个;
[0046]
b、由于改进鲸鱼优化算法用于找到bp神经网络训练结果偏差最小的值,自变量数量为1,则设置改进鲸鱼优化算法的自变量维度为1,种群规模为n,最大迭代次数设置为t次;
[0047]
c、设置概率p1=0.5为种群会按当前最优值继续寻优,设置概率p2=0.5为种群会从头开始寻优;
[0048]
d、设置改进鲸鱼优化算法再得到的bp神经网络训练误差小于等于2%或迭代达到最大迭代次数时停止,改进鲸鱼优化算法停止工作后,得到的bp神经网络训练结果偏差最小的值对应的初始权值j0和阈值k0,将初始权值j0和阈值k0赋予bp神经网络作为初始权值和阈值进行训练。
[0049]
进一步的,所述步骤(5)中,改进鲸鱼优化算法优化bp神经网络训练,bp神经网络的参数设置如下:
[0050]
a、bp神经网络的输入数据集为{id、iq、ud、uq、ωe},则设置bp神经网络的输入数为5;输出数据集为{rs、ld、lq、ψf},则设置输出数为4;
[0051]
b、bp神经网络的隐含层数量选择m层,隐含层神经元数量根据经验及实践确定为n个。
[0052]
进一步的,所述步骤(6)中,输出未知参数的永磁同步电机各项参数,具体可输出的参数包括:永磁同步电机线电阻rs、d轴电感ld、q轴电感lq以及磁链ψf。
[0053]
与现有技术相比,本发明具有以下优点:
[0054]
1.本发明提出的永磁同步电机参数辨识方法通过引入的一种改进的鲸鱼优化算法与bp神经网络的相结合,相比传统的参数辨识方法,其优势是收敛速度快,无需进行公式推导和计算,模型搭建简便快捷,鲁棒性强,辨识精度高,辨识结果波动小。
[0055]
2.本发明提出的一种基于改进鲸鱼优化算法优化bp神经网络的永磁同步电机参数辨识方法,相比最小二乘参数辨识法,能够直接进行多个参数的辨识,且辨识精度比最小二乘法高。
[0056]
3.本发明提出的一种基于改进鲸鱼优化算法优化bp神经网络的永磁同步电机参数辨识方法,相比模型参考自适应参数辨识法,辨识精度更高,且无需进行大量的公式推导和计算,同时省略了人工调节模型参考自适应的自适应律以及搭建精准的电机控制参考模
型和可调模型的步骤,使用起来更加方便。
[0057]
4.本发明提出的一种基于改进鲸鱼优化算法优化bp神经网络的永磁同步电机参数辨识方法,相比传统神经网络参数辨识法,辨识初始阶段波动小,鲁棒性较好,辨识速度更快。
附图说明
[0058]
以下附图是本发明利用foc控制系统所得出的部分仿真结果图,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,以下实施例为了更直观表现本发明对永磁同步电机参数辨识的效果,加入了未作改进的鲸鱼优化算法优化bp神经网络(woa-bpnn)以及未做优化的bp神经网络(bpnn)两种辨识法的对比,在正常运用时,无需进行对比。
[0059]
图1是一种高精度的永磁同步电机的参数辨识方法流程图。
[0060]
图2是本发明的基于改进鲸鱼优化算法优化bp神经网络的永磁同步电机参数辨识方法的结构框图。
[0061]
图3为永磁同步电机电阻、d轴、q轴电感以及磁链变化情况。
[0062]
图4是给定工况下,永磁同步电机线电阻rs基于tcwoa-bpnn、woa-bpnn与bpnn的辨识结果对比。
[0063]
图5是给定工况下,永磁同步电机d轴电感ld基于tcwoa-bpnn、woa-bpnn与bpnn的辨识结果对比。
[0064]
图6是给定工况下,永磁同步电机q轴电感lq基于tcwoa-bpnn、woa-bpnn与bpnn的辨识结果对比。
[0065]
图7是给定工况下,永磁同步电机磁链ψf基于tcwoa-bpnn、woa-bpnn与bpnn的辨识结果对比。
具体实施方式
[0066]
为了说明本发明所述的技术方案,结合附图进一步说明本发明。
[0067]
本发明提供基于改进鲸鱼优化算法优化bp神经网络的永磁同步电机参数辨识方法,如图1和2所示,包括以下步骤:
[0068]
(1)搭建foc控制系统控制已知参数永磁同步电机运行:根据永磁同步电机foc矢量控制方法搭建foc控制系统,并控制电机在小于本电机最大转矩、最大转速的工况下运行;在本发明的实施方式中,本发明使用matlab/simulink软件进行foc控制系统搭建,通过所使用的永磁同步电机的型号获取永磁同步电机同步旋转坐标系下的d轴电感ld、q轴电感lq、永磁同步电机极对数p、永磁同步电机线电阻rs、永磁同步电机磁链ψf、永磁同步电机的转动惯量j、阻尼系数b。使用matlab/simulink软件搭建速度环pi模块、q轴电流环pi模块、d轴电流环pi模块、clarke变换模块、park变换模块,svpwm模块、逆park变换模块,逆变器模块、永磁同步电机pmsm模块、电流传感器、速度/位置传感器、woa-bpnn参数辨识模块,并给定速度环pi模块的参考转速ω
e_ref
以及d轴电流环pi模块的参考电流i
d_ref
,其中clarke变换模块、park变换模块,svpwm模块、逆park变换模块、永磁同步电机pmsm模块以及woa-bpnn
参数辨识模块使用matlab/simulink中的s-function进行程序编写,其余模块则是使用matlab/simulink模块库自带的模块;使用matlab/simulink软件搭建的foc控制系统的具体如下:
[0069]
逆变器模块和永磁同步电机pmsm模块连接来驱动永磁同步电机pmsm模块运行,电流传感器模块设于逆变器和永磁同步电机pmsm模块之间采集逆变器输出到永磁同步电机pmsm模块的三相电流ia、ib、ic并输出到clark变换模块进行运算;
[0070]
clark变换模块分别和park变换模块、速度/位置传感器连接,将三相电流ia、ib、ic通过clark变换模块得到的静止坐标系下的电流i
α
、i
β
分别输入park变换模块、速度/位置传感器中;
[0071]
速度/位置传感器分别与速度环pi模块、park变换模块、逆park变换模块、永磁同步电机pmsm模块连接,从永磁同步电机pmsm模块采集永磁同步电机机械角速度ωm并计算得到电角速度ωe,输入速度环pi模块对永磁同步电机转速进行控制;从永磁同步电机pmsm模块采集永磁同步电机机械角度θm并计算得到电角度θe,分别输入park变换模块、逆park变换模块参与计算;
[0072]
速度环pi模块将永磁同步电机电角速度ωe以及参考转速ω
e_ref
进行运算得到q轴电流参考值iq*,输入到q轴电流环pi模块;
[0073]
park变换模块分别与q轴电流环pi模块、d轴电流环pi模块连接;park变换模块将静止坐标系下的电流i
α
、i
β
以及速度/位置传感器得到的电角度θe输入进行运算转换为同步旋转坐标系下的电流id、iq;将id、iq分别输入到d轴电流环pi模块以及q轴电流环pi模块,完成永磁同步电机d、q轴电流控制;
[0074]
q轴电流环pi模块将q轴电流参考值iq*和iq进行运算得到uq,d轴电流环pi模块将输入的参考电流i
d_ref
和id进行运算得到ud;
[0075]
逆park变换模块分别与q轴电流环pi模块、d轴电流环pi模块、svpwm模块连接,将分别从q轴电流环pi模块和d轴电流环pi模块得到的uq、ud以及速度/位置传感器得到的电角度θe输入进行运算,得到静止坐标系下的电压u
α
、u
β
并输入svpwm模块;
[0076]
svpwm模块和逆变器模块连接,用于将静止坐标系下的电压u
α
、u
β
输入到svpwm模块运算,得到三相电压ua、ub、uc,并输入到逆变器模块;
[0077]
woa-bpnn参数辨识模块与park变换模块、d轴电流环pi模块、q轴电流环pi模块以及速度/位置传感器模块连接,将id、iq、ud、uq、ωe输入woa-bpnn参数辨识模块中,计算输出永磁同步电机的线电阻rs、d轴电感ld、q轴电感lq以及磁链ψf。
[0078]
通过逆park变换将同步旋转坐标系下的电压ud、uq转化为静止坐标系下的电压u
α
、u
β
,具体方法为:
[0079]uα
=udcosθ
e-uqsinθe[0080]uβ
=udsinθe+uqcosθe。
[0081]
(2)采集电机运行信号:通过电流传感器检测永磁同步电机的三相电流ia、ib、ic;通过转速传感器检测电机的机械角速度ωm,通过计算得到电机电角速度ωe;通过位置传感器检测电机机械角度θm,通过计算得到电机电角度θe;
[0082]
转速传感器检测电机的机械角速度ωm,并通过计算得到的电机电角速度ωe的具体方法为:
[0083]
ωe=p*ωm[0084]
位置传感器检测电机机械角度θm,并通过计算得到的电机电角度θe,其具体方法为:
[0085]
θe=p*θm[0086]
其中,p表示极对数。
[0087]
(3)坐标变换:将步骤(2)得到的电机的三相电流ia、ib、ic通过clarke变换转化为静止坐标系下的电流i
α
、i
β
,再通过park变换转化为同步旋转坐标系下的电流id、iq;
[0088]
将电机的三相电流ia、ib、ic通过clarke变换转化为静止坐标系下的电流i
α
、i
β
的具体方法为:
[0089][0090][0091]
将静止坐标系下的电流i
α
、i
β
通过park变换转化为同步旋转坐标系下的电流id、iq的具体方法为:
[0092]
id=iacosθe+i
β
sinθe[0093]iq
=-i
α
sinθe+i
β
cosθe。
[0094]
(4)pi控制:使用matlab/simulink中的pid模块搭建速度环pi模块、d轴电流环pi模块以及q轴电流环pi模块;将步骤(2)得到的电角速度ωe和参考转速ω
e_ref
输入速度环pi模块,速度环pi模块输出q轴电流参考值至q轴电流环pi模块;将参考电流i
d_ref
输入d轴电流环pi模块,同时将步骤(3)得到的同步旋转坐标系下的电流id、iq分别输入d轴电流环pi模块以及q轴电流环pi模块进行计算,d轴电流环pi模块以及q轴电流环pi模块分别输出d轴电压ud和q轴电压uq;
[0095]
(5)改进鲸鱼优化算法优化bp神经网络训练:改进鲸鱼优化算法优化bp神经网络tcwoa-bpnn,由输入层、隐含层及输出层构成,将步骤(3)所得到的d、q轴电流id、iq、步骤(4)得到的d、q轴电压ud、uq以及步骤(2)得到的电机电角速度ωe作为tcwoa-bpnn的输入,将步骤(1)中所述的已知参数的永磁同步电机参数作为输出,进行训练,获得用于永磁同步电机参数辨识的改进鲸鱼优化算法优化bp神经网络;其中改进鲸鱼优化算法的参数设置如下:
[0096]
a、鲸鱼优化算法的改进包括tent混沌映射(tent chaotic map)以及精英学习机制(cream learning mechanism)。tent混沌映射表示为:
[0097][0098]
式中x0为鲸鱼优化算法种群中的初始个体,xn和x
n+1
为种群中生成的第n个个体和第n+1个个体,rand[0,1]表示从0到1之间取随机数。精英学习机制表示为:
[0099]
xc=j
·k·
[x
i-x
*
]
[0100][0101]
式中xc为鲸鱼优化算法生成的精英个体,j和k的取值为0-1之间的随机数,xi为当前鲸鱼优化算法种群中的个体,x
*
为种群中当前位置最优个体。
[0102]
b、改进鲸鱼优化算法在于找到bp神经网络训练结果偏差最小的值,自变量数量为1,则设置改的鲸鱼优化算法的自变量维度等于1,设种群规模为n,最大迭代次数设置为t次,本实施方式中的n取值50,t取值30;
[0103]
c、设置概率p1=0.5为种群会按当前最优值继续寻优,设置概率p2=0.5为种群会从头开始寻优;
[0104]
d、设置改进鲸鱼优化算法再得到的bp神经网络训练误差小于等于2%或迭代达到最大迭代次数时停止,改进鲸鱼优化算法停止工作后,将得到的bp神经网络训练结果偏差最小的值对应的初始权值j0和阈值k0赋予bp神经网络作为初始权值和阈值进行训练。
[0105]
bp神经网络的参数设置如下:
[0106]
a、bp神经网络的输入数据集为{id、iq、ud、uq、ωe},因此设置bp神经网络的输入数为5;输出数据集为{rs、ld、lq、ψf},因此设置输出数为4;
[0107]
b、bp神经网络的隐含层数量设置为m层,隐含层神经元数量选择n个,本实施方式中m取值为1,n取值为6。
[0108]
(6)实现电机参数识别:将未知参数的永磁同步电机使用foc控制系统控制运行,重复步骤(2)、步骤(3)和步骤(4),将得到的数据id、iq、ud、uq、ωe输入至步骤(5)得出的改进鲸鱼优化算法优化bp神经网络中,输出永磁同步电机pmsm的线电阻rs、d轴电感ld、q轴电感lq以及磁链ψf。
[0109]
使用matlab/simulink仿真软件运行4s,为了验证本发明所提出的一种基于鲸鱼优化算法优化bp神经网络的永磁同步电机参数辨识方法的鲁棒性,所有实施例在运行的前两秒的负载t
l
=1n
·
m,后两秒的负载t
l
=3n
·
m;此外,实施例为验证本发明所述的参数辨识方法应对电机参数发生变化时的可靠性,设置电机参数随时间发生变化,其中线电阻rs由初始值0.180ω,逐渐上升至0.209ω;d轴电感ld由初始值0.0893h,逐渐上升至0.103h;q轴电感lq由初始值0.205h,逐渐上升至0.236h;磁链ψf由初始值0.0160wb,逐渐下降至0.0136h,参数具体变化情况如图3所示;此外,电机转动惯量j=0.003kg
·
m2,阻尼系数b=0.008,极对数p=2;所有实施例运行时都设置参考转速为1000r/min,d轴参考电流i
d_ref
=0。仿真结果图如图4、5、6、7所示。
[0110]
为兼顾辨识的速度和精度,本实施例中,输入数据集{id、iq、ud、uq、ωe}中的每个元素进行了随机采样,共采样1000个数据样本,取600个样本进行tcwoa-bpnn训练,剩下400个样本作为测试。
[0111]
根据附图4对比bpnn、woa-bpnn以及tcwoa-bpnn三个参数辨识方法对永磁同步电机定子电阻rs的辨识效果,在辨识初期以及负载发生变化时,bpnn的辨识误差极大,woa-bpnn与tcwoa-bpnn则有较好的辨识精度,在负载发生变化时,bpnn产生的波动约为0.035ω,woa-bpnn产生的波动约为0.02ω,tcwoa-bpnn产生的波动约为0.01ω,并且从图中可以看出在稳态时,tcwoa-bpnn的定子电阻稳态辨识误差最小。
[0112]
根据附图5对比bpnn、woa-bpnn以及tcwoa-bpnn三个参数辨识方法对永磁同步电机d轴电感ld的辨识效果,在辨识初期以及负载发生变化时,bpnn的辨识误差极大,woa-bpnn与tcwoa-bpnn则有较好的辨识精度,在负载发生变化时,bpnn产生的波动约为0.01h,woa-bpnn产生的波动约为0.005ω,而tcwoa-bpnn则几乎未产生波动,并且从图中可以看出在稳态时,tcwoa-bpnn的d轴电感稳态辨识误差最小。
[0113]
根据附图6对比bpnn、woa-bpnn以及tcwoa-bpnn三个参数辨识方法对永磁同步电机q轴电感lq的辨识效果,在辨识初期以及负载发生变化时,bpnn的辨识误差极大,woa-bpnn与tcwoa-bpnn则有较好的辨识精度,在负载发生变化时,bpnn产生的波动约为0.05h,woa-bpnn产生的波动约为0.03h,而tcwoa-bpnn产生的波动约为0.02h,并且从图中可以看出在稳态时,tcwoa-bpnn的q轴电感稳态辨识误差最小。
[0114]
根据附图7对比bpnn、woa-bpnn以及tcwoa-bpnn三个参数辨识方法对永磁同步电机磁链ψf的辨识效果,在辨识初期以及负载发生变化时,bpnn的辨识误差极大,woa-bpnn与tcwoa-bpnn则有较好的辨识精度,在负载发生变化时,bpnn产生的波动约为0.0035wb,woa-bpnn产生的波动约为0.002wb,而tcwoa-bpnn几乎不存在波动,并且从图中可以看出在稳态时,tcwoa-bpnn的磁链稳态辨识误差最小。
[0115]
综合对附图4、5、6、7的对比分析可得,基于tcwoa-bpnn永磁同步电机参数辨识方法的辨识效果相较于bp神经网络(bpnn)以及未作改进的鲸鱼优化算法优化bp神经网络(woa-bpnn)精度更高,辨识过程中波动更小,在辨识初期就有较好的辨识效果,并且在负载发生突变时,产生的辨识波动也远小于其他两种方法。因此可以验证本发明提出的一种基于改进鲸鱼优化算法优化bp神经网络的永磁同步电机参数辨识方法,辨识精度高,辨识系统的鲁棒性好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1