一种线缆行走除冰机器人及其跨塔方法与流程
1.本发明涉及一种线缆行走除冰机器人及其跨塔方法。
背景技术:
2.在野外的寒冷恶劣环境中,线缆上会容易结冰存在安全隐患,需要一种可以进行除冰作业的机器人。在作业时,机器人需要进行跨塔作业,所以在塔头与线缆连接处设置了跨塔旁轨。机器人可从跨塔旁轨驶过绕过塔头实现跨塔作业目的。有些线缆设有防震锤,防震锤通常布置在塔头附近,因此防震锤与跨塔旁轨距离也会较近,增加了跨塔作业的难度。因此需要设计一种线缆行走除冰机器人跨塔方法。
技术实现要素:
3.为解决上述技术问题,本发明提供一种线缆行走除冰机器人。
4.本发明另一个目的是提供一种应用于前述线缆行走除冰机器人的跨塔方法。
5.本发明采用以下技术方案:一种线缆行走除冰机器人,其用于在设有防震锤和跨塔旁轨的线缆上行走作业,所述跨塔旁轨的两端通过旁轨连接块和所述线缆连接,所述线缆行走除冰机器人包括可在线缆上行进的左行走机构和右行走机构,所述左行走机构和所述右行走机构通过展臂连接,所述左行走机构和所述右行走机构均和所述展臂传动连接,所述左行走机构和所述右行走机构设有用于驱使其在线缆上行进的行走机构,所述左行走机构和所述右行走机构均设有可升降的压紧机构,所述展臂设有超声波模块,通过所述超声波模块检测其到所述线缆的距离变化识别所述防震锤和/或跨塔旁轨、判断是否跨过所述防震锤和/或所述跨塔旁轨,所述线缆行走除冰机器人设有电控箱,所述超声波模块和所述电控箱信号连接,所述电控箱根据所述超声波模块的检测数据控制所述左行走机构、所述右行走机构、所述展臂以及所述压紧机构动作跨过所述防震锤和/或所述跨塔旁轨。
6.可选地,所述展臂通过第一驱动机构驱动所述左行走机构和所述右行走机构相向运动或背向运动。
7.可选地,所述电控箱可活动的设于所述展臂上以调节所述线缆行走除冰机器人的重心位置。
8.可选地,所述左行走机构和所述右行走机构通过第二驱动机构驱动所述压紧机构升降。
9.可选地,所述左行走机构和所述右行走机构设有用于记录所述线缆行走除冰机器人行走距离的里程计。
10.可选地,所述左行走机构和/或所述右行走机构通过举升机构连接有除冰机构。
11.应用于上述任一项所述的线缆行走除冰机器人的跨塔方法,定义l4为所述左行走机构和所述右行走机构之间间隔距离为a时超声波模块到所述右行走机构左侧边的距离,l5为所述左行走机构和所述右行走机构之间间隔距离为a时
所述左行走机构的压紧机构到所述右行走机构的压紧机构之间的距离,l6为所述防震锤和所述旁轨连接块的距离,l7为所述压紧机构的宽度,l9为所述线缆行走除冰机器人的右行走机构跨过所述旁轨连接块时所述超声波模块和所述旁轨连接块下部的距离,l11为所述线缆行走除冰机器人的右行走机构跨过所述跨塔旁轨时所述超声波模块和所述跨塔旁轨的距离,l14为所述旁轨连接块的斜边和顶边长度之和,l16为所述防震锤的长度;l6=3*l7;a=1.5*l16;所述跨塔方法包括:步骤1:所述线缆行走除冰机器人在无障碍物的线缆段上行走时,所述第一驱动机构驱动所述左行走机构和所述右行走机构间隔至距离a处,所述超声波模块实时检测其自身到上方线缆的距离并计算平均值l1;步骤2:当所述超声波模块检测到l1发生跳变时,判断所述线缆行走除冰机器人在经过障碍物,开始计算在所述线缆行走除冰机器人继续行走距离x1cm的过程中,所述超声波模块检测其自身到上方障碍物的距离计算平均值l2;步骤3:比较l1和l2,若l1-l2≥7cm,则判断障碍物为防震锤,此时所述线缆行走除冰机器人停止行进,所述右行走机构的压紧机构下降,待所述右行走机构的压紧机构下降到位后,所述线缆行走除冰机器人继续行进;步骤4:当所述超声波模块检测其自身到上方物体距离从l2跳变为l1
±
10%时,开始计算在所述线缆行走除冰机器人继续行走距离x1cm的过程中,所述超声波模块检测其自身到上方物体距离计算平均值l3;步骤5:判断l3与l1,若l3与l1的偏差在
±
10%以内,则判断超声波模块已过防震锤,然后所述线缆行走除冰机器人继续行进距离l4使所述右行走机构位于防震锤与旁轨连接块之间,然后控制所述右行走机构的压紧机构上升压紧线缆、控制所述左行走机构的压紧机构下降松开线缆;步骤6:所述线缆行走除冰机器人继续行进,若所述超声波模块检测其自身到上方物体距离跳变到l9
±
10%,则触发开始计算在所述线缆行走除冰机器人继续行走距离x1cm的过程中,所述超声波模块检测其自身到上方物体距离平均值l10;步骤7:判断l10与l9,若l10与l9的偏差在
±
10%以内,则判断超声波模块已位于所述旁轨连接块下方;步骤8:控制所述线缆行走除冰机器人行走距离l4-l7-2*x1cm后停止行进,控制所述右行走机构锁定,控制所述左行走机构相对所述右行走机构运动,使所述左行走机构向所述右行走机构方向移动至间距b,判断所述左行走机构和所述右行走机构均位于所述防震锤和所述旁轨连接块之间;步骤9:然后控制所述左行走机构的压紧机构上升压紧线缆,控制所述右行走机构的压紧机构下降松开线缆,然后控制所述左行走机构的锁定,控制所述右行走机构相对所述左行走机构背向移动至间距a,判断所述右行走机构驶上跨塔旁轨;步骤10:所述右行走机构的压紧机构上升压紧跨塔旁轨,所述左行走机构的压紧机构下降松开线缆;步骤11:然后所述线缆行走除冰机器人行进,计算所述线缆行走除冰机器人的行进距离,当所述线缆行走除冰机器人行进6l7距离时,判断所述左行走机构驶上跨塔旁轨,然后所述左行走机构的压紧机构上升压紧所述跨塔旁轨,然后控制所述线缆行走除冰机器
人继续行进;步骤12:当所述超声波模块检测其自身到上方物体距离跳变到l11
±
10%时,则控制所述线缆行走除冰机器人停止行进,计算所述线缆行走除冰机器人的行进距离,然后计算在所述线缆行走除冰机器人继续行进距离x1cm的过程中,所述超声波模块检测其自身到上方物体距离计算平均值l12;步骤13:判断l12与l11,若l12与l11的偏差在
±
10%以内,则判断所述超声波模块已到达所述跨塔旁轨出口处;步骤14:控制所述线缆行走除冰机器人停止行进,使所述右行走机构的压紧机构下降松开所述跨塔旁轨;步骤15:控制所述线缆行走除冰机器人行进,开始计算所述线缆行走除冰机器人行进距离,当行进距离为l14+l7+x1cm时,则判断所述右行走机构驶上线缆;步骤16:然后控制所述线缆行走除冰机器人停止行进,所述右行走机构的压紧机构上升夹紧线缆,所述左行走机构的压紧机构下降松开跨塔旁轨;步骤17:控制所述线缆行走除冰机器人行进,计算所述线缆行走除冰机器人行进距离,当所述线缆行走除冰机器人行进距离l7时,停止行进;步骤18:然后控制所述右行走机构锁定,此时所述右行走机构距所述旁轨连接块距离为l15=l6-2l7-2x1cm,控制所述左行走机构向所述右行走机构方向移动至间距b,判断所述左行走机构驶上线缆;步骤19:控制所述左行走机构停止移动,控制所述左行走机构的压紧机构上升夹紧线缆,所述右行走机构的压紧机构下降松开线缆;步骤20:控制所述线缆行走除冰机器人行进,同时开始计算所述除冰线缆行走除冰机器人行进距离,当所述除冰线缆行走除冰机器人行进距离l15+l7,则控制所述线缆行走除冰机器人停止行进;步骤21:然后控制所述左行走机构锁定,控制所述右行走机构相对所述左行走机构背向移动至间距a,判断所述右行走机构驶过所述防震锤;步骤22:控制所述右行走机构的压紧机构上升压紧线缆,所述左行走机构的压紧机构下降松开线缆;步骤23:控制所述线缆行走除冰机器人开始行进,同时开始计算所述线缆行走除冰机器人行进距离,当所述线缆行走除冰机器人行进距离l16+3*l7时,则判断所述左行走机构驶过所述防震锤,然后控制所述左行走机构的压紧机构上升压紧线缆,则线缆行走除冰机器人完成跨塔作业。
12.可选地,所述步骤4中,通过设置在所述左行走机构里的里程计计算所述线缆行走除冰机器人的行进距离;所述步骤6中,通过设置在所述右行走机构里的里程计计算所述线缆行走除冰机器人的行进距离;所述步骤7中,当判断超声波模块已位于所述旁轨连接块下方后,所述右行走机构里的里程计清零;所述步骤8中,通过设置在所述右行走机构里的里程计计算所述线缆行走除冰机器人的行进距离;
所述步骤11中,通过设置在所述右行走机构里的里程计计算所述线缆行走除冰机器人的行进距离;所述步骤12中,通过设置在所述左行走机构里的里程计计算所述线缆行走除冰机器人的行进距离;所述步骤15中,通过设置在所述左行走机构里的里程计计算所述线缆行走除冰机器人的行进距离;所述步骤17中,通过设置在所述右行走机构里的里程计计算所述线缆行走除冰机器人的行进距离;所述步骤20中,通过设置在所述左行走机构里的里程计计算所述线缆行走除冰机器人的行进距离;所述步骤23中,通过设置在所述右行走机构里的里程计计算所述线缆行走除冰机器人的行进距离。
13.可选地,所述间距a是所述左行走机构和所述右行走机构的最大间距,所述间距b是所述左行走机构和所述右行走机构的最小间距。
14.可选地,x1=5cm。
15.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:采用上述技术方案,通过检测距离的变化判断线缆行走除冰机器人所处的位置,然后以此控制压紧机构上升或下降来避障,进而完成跨塔作业,使线缆行走除冰机器人可实现自主跨塔;本发明还提供了一种线缆行走除冰机器人。
附图说明
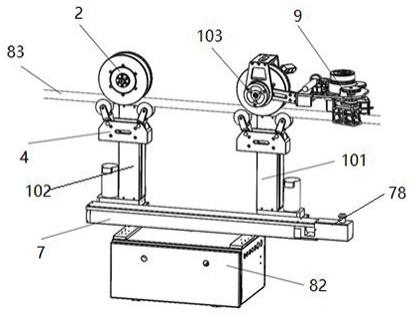
16.图1为本发明线缆行走除冰机器人的示意图之一;图2为本发明行走机构的示意图;图3为本发明行走机构和附加功能组件的剖视图;图4为本发明压紧组件的爆炸图;图5为本发明压紧组件的剖视图;图6为本发明线缆行走除冰机器人的爆炸图;图7为本发明线缆行走除冰机器人的剖视图;图8为本发明线缆行走除冰机器人的示意图之二;图9为本发明线缆行走除冰机器人和线缆结合的示意图;图10-图20为本发明线缆行走除冰机器人跨塔作业的过程图。
17.示意图中的标号说明:1、双臂组件;11、第一连接臂;111、第一铰接件;112、第三壳;1121、滑轨;1122、滑块;1123、竖向滑槽;12、第二连接臂;2、行走机构;21、驱动器;22、行走电机;23、电机固定盘;24、电机壳;241、连接座;25、电机壳盖;26、行走轮;261、轮毂;262、轮胎;27、第一法兰;28、第二法兰;29、第一轴承;3、支撑架;31、左支撑臂;32、横臂;33、右支撑臂;331、感应电导电轮;34、附加电机壳;35、第三法兰;36、第四法兰;37、摆件;38、第二轴承;39、附加电机;4、压紧机构;41、基座;411、充电触头;42、摆臂;43、压紧轮;44、第一弹性件;45、第一滑杆;451、容置槽;452、防脱件;453、透过孔;46、第二滑杆;461、防脱钉;462、保护件;5、第一感应
器;51、第一壳;511、第一滑孔;52、第一传感器;521、触发弹片;53、撞击缓冲件;531、第一滑柱;532、触发挡板;54、第二弹性件;6、丝杆升降机构;61、第一升降件;62、第一丝杆;63、第一进给螺母;64、第一电机;7、展臂;71、第二电机;72、第二丝杆;73、第二进给螺母;731、筒状部;732、固定挡板;75、第一移动件;751、容纳槽;752、弯折连接部;7521、弯折槽;753、平板部;76、第三电机;77、第二壳;78、超声波模块;81、锁臂伸缩电机;82、电控箱;83、线缆;832、跨塔旁轨;833、旁轨连接块;9、除冰机构;10、防震锤;101、右行走机构;102、左行走机构;103、举升机构。
具体实施方式
18.为进一步了解本发明的内容,结合附图1-20及实施例对本发明作详细描述。
19.结合附图1-20,本实施例的一种线缆行走除冰机器人,其用于在设有防震锤10和跨塔旁轨832的线缆83上行走作业,跨塔旁轨832的两端通过旁轨连接块833和线缆83连接。
20.线缆行走除冰机器人包括行走机构2、双臂组件1、压紧机构4、行走转向组件、锁臂组件、附加功能组件和展臂组件。行走机构2设有两组并且间隔设置在线缆83上。双臂组件1包括连接臂,连接臂设有两个分别是第一连接臂11和第二连接臂12,第一连接臂11和第二连接臂12上端对应各设置一组行走机构2,行走机构2用于驱使线缆行走除冰机器人在线缆83上移动。压紧机构4设有两个分别设在第一连接臂11和第二连接臂12上,第一连接臂11和第二连接臂12均设有可使压紧机构4升降的机构。行走转向组件设于行走机构2和连接臂之间用于控制行走机构2和连接臂的转动活动度。展臂组件包括展臂7,展臂7设有可调节第一连接臂11第二连接臂12之间距离的机构。锁臂组件设于连接臂和展臂组件之间用于调节连接臂和展臂组件之间的转动活动度。行走机构2通过举升机构103连接有除冰机构9/感应电导电轮331。附加功能组件包括举升机构103和除冰机构9/感应电导电轮331,本实施例中,举升机构103包括附加电机39和摆件37。
21.行走机构2包括驱动器21、行走电机22、电机固定盘23、电机壳24、电机壳盖25和行走轮26。第一连接臂11和第二连接臂12的结构相同,以下以第一连接臂11为例进行说明。
22.电机壳24、电机壳盖25和电机固定盘23围成了用于容置驱动器21和行走电机22的容置空间。驱动器21和行走电机22电连接,行走电机22和行走轮26传动连接。行走电机22固定于电机固定盘23,电机固定盘23固定于电机壳24,电机壳24的端部和电机壳盖25固定连接。
23.行走电机22的输出轴伸出于电机固定盘23外,行走电机22的输出轴固定连接有第一法兰27,第一法兰27固定连接有第二法兰28,第二法兰28和行走轮26固定连接。电机固定盘23的部分结构为筒状结构,第二法兰28的部分结构为筒状结构使第二法兰28可套设于电机固定盘23外,第二法兰28和电机固定盘23之间通过第一轴承29连接,使行走轮26可相对于电机固定盘23转动。行走轮26包括轮毂261和轮胎262,轮毂261套设于第二法兰28外并和第二法兰28固定连接。轮毂261的横断面为v字型结构,相应的轮胎262的横断面为v字型结构,线缆83设于轮胎262的v字型的夹缝里。工作时,驱动器21发送电信号给行走电机22,行走电机22通过第一法兰27和第二法兰28带动行走轮26转动。具体应用时,轮胎262采用高弹性、高摩擦的聚氨脂材料,以增加轮胎262和线缆83之间的摩擦力,使行走轮26在线缆83上转动时不打滑。第一法兰27采用合金钢材料,第二法兰28和轮毂261采用轻质铝合金材料。
24.结合附图2和3,还包括支撑架3,支撑架3一端和电机壳24固定连接,支撑架3另一端连接有附加电机壳34,支撑架3包括左支撑臂31、右支撑臂33和横臂32,左支撑臂31和电机壳24固定连接,右支撑臂33和附加电机壳34固定连接,横臂32设于左支撑臂31和右支撑臂33之间。附加电机壳34内固定有附加电机39,附加电机39的输出轴固定连接有第三法兰35,第三法兰35固定连接有第四法兰36,第四法兰36固定连接有摆件37,第四法兰36和第一法兰27之间通过第二轴承38连接。附加电机39转动可驱动摆件37摆动。摆件37端部可转动的设有感应电导电轮331,具体应用时,感应电导电轮331采用耐磨铜合金或石墨材料。本实施例中,摆件37设有两个,另一个摆件37可转动的设于电机固定盘23上,一个摆件37端部设有感应电导电轮支架右,另一个摆件37端部设有感应电导电轮支架左,感应电导电轮支架右和感应电导电轮支架左之间设有转动轴,感应电导电轮331设于转动轴上。感应电导电轮331可使线缆行走除冰机器人整体与线缆83形成等电位以避免引起电击危险。支撑架3为用于规避行走轮26的龙门结构或拱门结构,行走轮26位于左支撑臂31和右支撑臂33之间。
25.结合附图6和7,行走转向组件包括转向电机,电机壳24固定有连接座241,转向电机设于连接座241和连接臂之一,转向电机轴和另一个连接,可驱动连接座241和连接臂之间相对转动或相对锁定不能转动;或者,第一连接臂11和连接座241可转动的连接,具体应用时,通过轴承可转动的连接。连接座241可以为壳体或者块状物。
26.结合附图4和5,压紧机构4用于和行走机构2配合压紧线缆83。压紧机构4包括基座41、摆臂42和压紧轮43,摆臂42和基座41可转动的连接,压紧轮43设于摆臂42的端部,线缆83位于行走轮26和压紧轮43之间。压紧轮43的表面为凹弧面,使压紧轮43表面中部比两侧低用于和行走轮26的v字型结构相互配合,以防止线缆83脱出。摆臂42设有两个,两个摆臂42之间设有第一弹性件44,两摆臂42相对设置,两摆臂42的中部均和基座41铰接,两压紧轮43可转动的各设于两摆臂42的一端,两摆臂42另一端之间设有第一弹性件44。两摆臂42呈张开的v字型结构,两摆臂42都具有弯折结构,使两摆臂42背向弯折形成v字型结构。工作时,两摆臂42形成的v字型结构的张开口和线缆83相对使压紧轮43压紧线缆83,当线缆83上有凸出的障碍物时,两摆臂42之间会发生扩张,第一弹性件44使两摆臂42之间可弹性扩张,使两压紧轮43始终压紧在线缆83上,防止线缆行走除冰机器人从线缆83上脱落。压紧轮43上设有用于计程的里程计,里程计检测压紧轮43在线缆83上的行程。
27.具体应用时,其中一个摆臂42另一端铰接有第一滑杆45,另一个摆臂42另一端铰接有第二滑杆46,第一滑杆45设有用于容置第二滑杆46一端的容置槽451以使第一滑杆45和第二滑杆46之间可滑动的连接。第一弹性件44套设于第二滑杆46上,容置槽451端部设有防脱件452,防脱件452设有使第二滑杆46一端伸入的透过孔453,第二滑杆46一端设有防脱钉461,防脱钉461的尺寸大于透过孔453的尺寸以防止第二滑杆46从容置槽451内脱出。第二滑杆46设有保护件462,第一弹性件44一端抵接防脱件452,第一弹性件44另一端抵接保护件462。本实施例中第一弹性件44为压缩弹簧。在其他实施方式中,第一弹性件44设于摆臂42和基座41之间,第一弹性件44为设于摆臂42和基座41铰接点处的扭转弹簧。
28.基座41具体应用时为壳体,基座41左右两侧边均设有用于检测障碍物的第一感应器5。第一感应器5包括和基座41固定连接的第一壳51。第一壳51内具有容置第一传感器52的空间。第一壳51可滑动的设有撞击缓冲件53,撞击缓冲件53设有第一滑柱531,第一壳51设有第一滑孔511,第一滑柱531伸进第一滑孔511内,使撞击缓冲件53可相对于第一壳51滑
动,第一滑柱531和第一壳51之间设有第二弹性件54。第一传感器52设有触发弹片521,第一滑柱531设有触发挡板532,触发挡板532设于第一壳51内。当撞击缓冲件53撞击到线缆83上的障碍物时,第一滑柱531滑动使触发挡板532撞击触发弹片521,触发弹片521变形可触发第一传感器52,第一传感器52通过控制器控制整个第一连接臂11后移。第一连接臂11后移以后,在第二弹性件54的作用下撞击缓冲件53恢复到初始位置,使触发挡板532和触发弹片521相分离。基座41上还设有用于给整个线缆行走除冰机器人充电的充电触头411,线缆83上间隔的设置有多个充电机构,当线缆行走除冰机器人移动到充电机构的位置时,充电触头411可以和充电机构电接触。
29.结合附图6和7,第一连接臂11包括第三壳112,第三壳112上可滑动的设有第一升降件61,第一升降件61和基座41可转动的连接,使压紧机构4可稍微前后的摆动。第三壳112内设有滑轨1121,第一升降件61连接有和滑轨1121配合的滑块1122,第三壳112还设有使第一升降件61可进入内部和滑块1122连接的竖向滑槽1123。第一升降件61和第一连接臂11之间设有丝杆升降机构6。丝杆升降机构6包括可转动的设于第三壳112内的第一丝杆62、和第一丝杆62配合的第一进给螺母63以及第一电机64,第一进给螺母63和第一升降件61固定连接,第一电机64通过齿轮组/同步带和第一丝杆62传动连接。第三壳112下端设有第一电机安装座,第一电机64安装于第一电机安装座。
30.第一电机安装座铰接有第一铰接件111,第一铰接件111和展臂7之间设有第一丝杆驱动机构。展臂7包括第二壳77,第一丝杆驱动机构包括安装于第二壳77的第二电机71、可转动的设于第二壳77内的第二丝杆72、和第二丝杆72配合的第二进给螺母73。第二电机71通过齿轮组/同步带和第二丝杆72传动连接,第二进给螺母73和第一铰接件111之间通过第一移动件75固定连接。第一移动件75一端设有容纳槽751结构,第二进给螺母73包括筒状部731和固定挡板732,筒状部731设于容纳槽751内,固定挡板732抵在容纳槽751的端面和第一移动件75螺钉连接。第一移动件75中间部设有弯折连接部752,弯折连接部752设有弯折槽7521,第二壳77的边沿设于弯折槽7521内使第一移动件75和第二壳77可滑动的连接。第一移动件75另一端设有平板部753,平板部753设于第一铰接件111的底部并和第一铰接件111螺钉连接。
31.第一连接臂11和第二连接臂12与同一展臂7连接,第二连接臂12的另一端铰接有第二铰接件,第一丝杆62还设有第三进给螺母,第三进给螺母通过第二移动件和第二铰接件固定连接,第三进给螺母和第二进给螺母73的结构相同,第二移动件的结构第一移动件75的结构相同。不同点在于,第一进给螺母63和第二进给螺母73内的螺纹螺旋方向相反,使第二丝杆72向一侧转动时,第一铰接件111和第二铰接件相靠近,第二丝杆72反向转动时,第一铰接件111和第二铰接件相分离。展臂7底部还设有电控箱82,展臂7和电控箱82之间设有第二丝杆驱动机构(图中未示出)。第二丝杆驱动机构包括可转动的设于展臂7的第三丝杆、第三电机76、和第三丝杆配合的第四进给螺母,第三电机76和第三丝杆传动连接,第四进给螺母和电控箱82固定连接,电控箱82和展臂7可滑动的连接。第三电机76安装于展臂7外。
32.第一连接臂11和第二连接臂12大致平行设置,当经过线缆83水平段时,此时线缆83、第一连接臂11、第二连接臂12和展臂7大致组成一方形结构。在线缆83水平段,行走机构2行进较快,当加速或减速时由于惯性原因第一连接臂11、第二连接臂12和展臂7会晃动。为
了提高线缆行走除冰机器人的稳定性,在第一铰接件111和第一连接臂11之间设置锁臂组件,相同的第二连接臂12和第二铰接件之间也设有锁臂组件。具体的,锁臂组件包括安装于第一铰接件111和第一连接臂11之一的锁臂伸缩电机81。锁臂伸缩电机81具有可伸缩的伸缩轴(图中未示出),另一个设有锁定孔(图中未示出),锁定孔为非圆孔,伸缩轴为与锁定孔配合的非圆轴,伸缩轴伸进锁定孔内锁定第一连接臂11和第一铰接件111的相对位置;锁臂组件还包括安装于第二铰接件和第二连接臂之一的锁臂伸缩电机和设于另一个的锁定孔,第二连接臂相对第二铰接件转动固定角度后伸缩轴伸进锁定孔内锁定第二连接臂和第二铰接件的相对位置。锁臂伸缩电机81可使第一连接臂11、第二连接臂12和展臂7保持上述方形结构。当经过线缆83倾斜段时,线缆行走除冰机器人做爬坡或下坡运动,控制锁臂组件解锁,使第一铰接件11和第一连接臂11之间、第二铰接件和第二连接臂12之间可相对转动,由于重力原因第一铰接件11和第一连接臂11之间、第二铰接件和第二连接臂12之间被动旋转,此时上述方形结构变为一平行四边形结构。
33.行走机构2和连接臂之间的转动方向、连接臂和展臂组件之间的转动方向相互垂直。行走机构2和连接臂之间可轴向转动,连接臂和展臂组件之间可水平方向转动。
34.第一连接臂11和第二连接臂12上均设有用于限制压紧机构4最低位置的限位开关。电控箱82内设有电连接的供电电池和控制器,控制器和限位开关、第一传感器52、充电触头411、行走电机22、第一电机64、第二电机71、第三电机76、附加电机39、锁臂伸缩电机81和转向电机电连接。
35.结合附图8-20,第一连接臂11和设置于其上端的行走机构2组成了左行走机构102,第二连接臂12和设置于其上端的行走机构2组成了右行走机构101。左行走机构102和右行走机构101通过展臂7连接,展臂7通过第一驱动机构驱动左行走机构102和右行走机构101相向运动或背向运动,第一驱动机构为第一丝杆驱动机构。左行走机构102和/或右行走机构101通过第二驱动机构驱动压紧机构升降,第二驱动机构为丝杆升降机构6。展臂7设有超声波模块78,通过超声波模块78检测其到线缆的距离变化识别防震锤10和/或跨塔旁轨832、判断是否跨过防震锤10和/或跨塔旁轨832,超声波模块78和电控箱82信号连接,电控箱82根据超声波模块78的检测数据控制左行走机构102、右行走机构101、展臂7以及压紧机构4动作跨过防震锤10和/或跨塔旁轨832。
36.线缆行走除冰机器人在线缆83上或跨塔时,至少有一个压紧机构4压紧线缆83,否则线缆行走除冰机器人将处于脱落风险状态。
37.定义l1为所述超声波模块78到所述线缆83的距离,l2为所述超声波模块78到所述防震锤10的距离,l4为所述左行走机构102和所述右行走机构101之间间隔距离最大时超声波模块78到所述右行走机构101左侧边的距离,l5为所述左行走机构102和所述右行走机构101之间间隔距离最大时所述左行走机构102的压紧机构到所述右行走机构101的压紧机构之间的距离,l6为所述防震锤10和所述旁轨连接块833的距离,l7为压紧机构的宽度,l9为所述线缆行走除冰机器人的右行走机构101跨过所述旁轨连接块833时所述超声波模块78和所述旁轨连接块833下部的距离,l11为所述线缆行走除冰机器人的右行走机构101跨过所述跨塔旁轨832时所述超声波模块78和所述跨塔旁轨832的距离,l14为旁轨连接块833的斜边和顶边长度之和,l16为防震锤10的长度;l6=3*l7;a=1.5*l16;跨塔方法包括:
步骤1:在跨塔之前,第一驱动机构驱动左行走机构102和右行走机构101间隔至最大距离处,超声波模块78实时检测其自身到上方线缆83的距离并计算平均值为l1;步骤2:线缆行走除冰机器人以速度v行进,当超声波模块78检测其自身到上方物体距离数值从l1发生跳变时,右行走机构101的里程计开始计数,线缆行走除冰机器人继续行走距离5cm,这过程中,超声波模块78检测其自身到上方物体距离计算平均值为l2,若l1-l2≥7cm,则判断上方物体为防震锤10,然后控制线缆行走除冰机器人停止行进;步骤3:举升机构103带动除冰机构9举升脱离线缆83,并且右行走机构101的压紧机构下降,然后线缆行走除冰机器人以速度0.2v行进。
38.步骤4:当超声波模块78检测其自身到上方物体距离从l2跳变为l1
±
10%时,左行走机构102的里程计开始计数,线缆行走除冰机器人继续行走距离5cm,这过程中,超声波模块78检测其自身到上方物体距离计算平均值为l3,若l3与l1的偏差在
±
10%以内,则判断超声波模块78已过防震锤10,然后使线缆行走除冰机器人继续行进距离l4,行进完毕后右行走机构101位于防震锤10与旁轨连接块833之间;步骤5:然后控制右行走机构101的压紧机构上升压紧线缆83,然后控制左行走机构102的压紧机构下降松开线缆83;步骤6:控制线缆行走除冰机器人以速度0.2v继续行进,若超声波模块78检测其自身到上方物体距离跳变到l9
±
10%,则右行走机构101的里程计开始计数,线缆行走除冰机器人继续行走距离5cm,在这过程中,超声波模块78检测其自身到上方物体距离平均值为l10,若l10与l9的偏差在
±
10%以内,则判断超声波模块78已位于旁轨连接块833下方并且使右行走机构101的里程计清零。
39.步骤7:右行走机构101的里程计计数,当线缆行走除冰机器人行走距离为l4-l7-10cm时,控制线缆行走除冰机器人停止行进;步骤8:然后控制右行走机构101的驱动轮锁定处于不可转动状态,控制左行走机构102的驱动轮处于可转动状态;步骤9:控制第一驱动机构驱动左行走机构102和右行走机构101相对运动,由于右行走机构101的驱动轮被锁定,所以右行走机构101停留不动,左行走机构102向右行走机构101方向移动至最小间距,移动后左行走机构102和右行走机构101均位于防震锤10和旁轨连接块833之间。
40.步骤10:然后控制左行走机构102的压紧机构上升压紧线缆83,控制右行走机构101的压紧机构下降松开线缆83;步骤11:然后控制左行走机构102的驱动轮锁定处于不可转动状态,控制右行走机构101的驱动轮处于可转动状态;步骤12:第一驱动机构驱动左行走机构102和右行走机构101背向运动,由于左行走机构102的驱动轮被锁定,所以左行走机构102停留不动,右行走机构101背向左行走机构102移动至最大间距,移动后右行走机构101驶上跨塔旁轨832。
41.步骤13:右行走机构101的压紧机构上升压紧跨塔旁轨832,左行走机构102的压紧机构下降松开线缆83;步骤14:然后控制线缆行走除冰机器人行进,同时右行走机构101的里程计计数,当线缆行走除冰机器人行进6l7距离时,判断左行走机构102驶上跨塔旁轨832,然后左行走
机构102的压紧机构上升压紧跨塔旁轨832,然后控制线缆行走除冰机器人继续行进;步骤15:当超声波模块78检测其自身到上方物体距离跳变到l11
±
10%时,则控制线缆行走除冰机器人停止行进,然后控制左行走机构102的里程计开始计数,然后控制线缆行走除冰机器人继续行进距离5cm,在这过程中,超声波模块78检测其自身到上方物体距离计算平均值为l12,若l12与l11的偏差在
±
10%以内,则判断超声波模块78已到达跨塔旁轨832出口处。
42.步骤16:控制线缆行走除冰机器人停止行进,使右行走机构101的压紧机构下降松开跨塔旁轨832;步骤17:控制线缆行走除冰机器人行进,左行走机构102里程计开始计数,当线缆行走除冰机器人行进距离为l14+l7+5cm时,则判断右行走机构101驶上线缆83,然后控制线缆行走除冰机器人停止行进,右行走机构101的压紧机构上升夹紧线缆83,左行走机构102的压紧机构下降松开跨塔旁轨832;步骤18:控制线缆行走除冰机器人行进,同时右行进机构的里程计开始计数,当线缆行走除冰机器人行进距离l7时,控制线缆行走除冰机器人停止转动,然后控制右行走机构101的驱动轮锁定处于不可转动状态,控制左行走机构102的驱动轮处于可转动状态,此时右行进机构距旁轨连接块833距离为l15=l6-2*l7-10cm=l7-10cm。
43.步骤19:控制第一驱动机构驱动左行走机构102和右行走机构101相对运动,由于右行走机构101的驱动轮处于锁定状态,所以右行走机构101停留不动,左行走机构102向右行走机构101方向移动至最小间距,然后控制左行走机构102的驱动轮停止转动,判断左行走机构102驶上线缆83;步骤20:然后控制左行走机构102的压紧机构上升夹紧线缆83,右行走机构101的压紧机构下降松开线缆83;步骤21:控制线缆行走除冰机器人行进,同时左行走机构102的里程计开始计数,当除冰线缆行走除冰机器人行进距离l15+l7,则控制线缆行走除冰机器人停止行进;然后控制左行走机构102的驱动轮锁定处于不可转动状态,右行走机构101的驱动轮处于可转动状态。
44.步骤22:控制第一驱动机构驱动左行走机构102和右行走机构101背向运动,由于左行走机构102的驱动轮被锁定,所以左行走机构102停留不动,右行走机构101背向左行走机构102移动至最大间距,判断右行走机构101驶过防震锤10;步骤23:控制右行走机构101的压紧机构上升压紧线缆83,左行走机构102的压紧机构下降松开线缆83;步骤24:控制线缆行走除冰机器人开始行进,同时右行走机构101的里程计开始计数,当线缆行走除冰机器人行进距离l16+3*l7时,则判断左行走机构102驶过防震锤10,然后控制左行走机构102的压紧机构上升压紧线缆83,则线缆行走除冰机器人完成跨塔作业。
45.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1