一种应用于电机驱动的H桥自适应衰减控制系统的制作方法
一种应用于电机驱动的h桥自适应衰减控制系统
技术领域
1.本发明涉及电机驱动技术领域,具体为一种应用于电机驱动的h桥自适应衰减控制系统。
背景技术:
2.在h桥驱动电路中如图1所示,四个mos管(101~104)组成了驱动电机线圈的h桥。当h桥工作时,如果mos管101与mos管104同时导通,则电流方向如图中实线箭头107所示。由于电机负载为绕组线圈,其呈现电感特性。当h桥驱动达到所需电流后将会关断mos管101与mos管104,但由于电感特性,其电流将按照原方向继续流动(续流特性),此时有两种续流方式:第一种是关闭上部mos管101、mos管103,打开下部mos管102、mos管104,此时电流方向如虚线箭头106所示。由于其工作特性,这种续流方式的电流较小,所以负载两端的电压差下降也较为缓慢,被称之为慢衰减;第二种是关闭原工作的mos管101、mos管104,打开反向mos管102、mos管103,此时电流方向如虚线箭头105所示。这种续流方式的电流较大,所以负载两端的电压差下降也较快,被称之为快衰减。
3.以上描述的电流与快/慢衰减的关系如图2所示,其中200是h桥驱动负载的pwm周期中的一个。周期201为上述h桥工作时,通过h桥向负载输出电流的时间段,这个时间段中mos管101、mos管104打开,电流呈上升趋势;当电流达到目标值后,mos管101、mos管104关闭,h桥进入衰减阶段202、203。202阶段为上述的快衰减阶段,图中可以看出电流下降速度较203阶段(慢衰减)更快。如果在供电周期201之外,全部为快衰减周期202,称之为快衰减模式;如果在供电周期201之外,全部为慢衰减周期203,则称之为慢衰减模式;当然也有像图2中所示兼有快/慢衰减,这种情况被称之为混合衰减模式。
4.快衰减和慢衰减各有优点,其中快衰减能让电流尽快衰减,避免由于电流波形变化太快引发的波形失真,但是这种快速变化会呈现出更大的电流波动,对于电机的平稳运行不利;而慢衰减则相反,在电流波形变化快的时候容易失真,但是慢速变化会表现出更加平顺的电流波形及电机运行状态;一般来讲,混合衰减综合了快衰减和慢衰减的优势,很大程度上改善了h桥衰减的性能。但是,由于h桥驱动电机的工况变化很大:速度变化、输出力矩变化等。这就造成固定比例的混合衰减模式无法满足全工况条件下的高性能要求。
技术实现要素:
5.为了解决现有h桥工作状态和外部器件环境无法实时自适应调节h桥驱动信号的快/慢衰减比例,影响h桥电路驱动的电机性能问题,其能够根据外部因素实时自适应调节快/慢衰减的比例,从而确保h桥在各种工作状态下均能保持较好的性能,从而提高h桥电路驱动的电机性能。
6.其技术方案是这样的:一种应用于电机驱动的h桥自适应衰减控制系统,其包括h
桥,其特征在于,其还包括数字控制模块、模拟比较器和数模转换器,所述数字控制模块的控制信号输出端连接所述h桥的输入端、数字信号输出端连接所述数模转换器的输入端,所述数模转换器的输出端连接所述模拟比较器的一个输入端,所述h桥的输出端连接所述模拟比较器的另一个输入端和尾电流感应电阻,所述模拟比较器比较尾电流大小与所述数字控制模块的预设电流值,并将比较结果发送到所述数字控制模块,所述h桥将根据所述数字控制模块给出的比较信号翻转来调整衰减模式。
7.其进一步特征在于,在一个pwm驱动波形的工作周期中,当尾电流处于电流目标值与电流容差值之间时,h桥采用快衰减模式,当尾电流小于电流容差值时,h桥采用慢衰减模式;当尾电流没有在电流目标值获得期内达到电流预设值时,所述数字控制模块调整电流容差值实现所述h桥快、慢衰减模式的比例;在包含至少两个pwm驱动波形的工作周期中,设mos管启动后所述数字控制模块对所述模拟比较器的输出结果没有响应的一个时间段为禁止期,当上一个工作周期的衰减不足时,尾电流在禁止期内大于电流目标值,则所述数字控制模块降低电流容差值而提高电流容差值和电流目标值的差异,快衰减比例增大,快衰减翻转点向后移动直到落入电流目标值获得期内;当上一个工作周期的衰减过大或电流波形发生较大变化时,尾电流在电流目标值获得期结束时也没有达到电流目标值,则所述数字控制模块增大电流容差值而降低电流容差值和电流目标值的差异,慢衰减比例增大,快衰减翻转点向前移动直到落入电流目标值获得期内;当上一个工作周期的衰减正常时,尾电流在电流目标值获得期达到电流目标值,如达到时刻没有落在预设的最佳目标点上,则数字控制模块增大或减小电流容差值来调节快、慢衰减的比例,快衰减翻转点逐步向最佳目标点接近直至达到控制误差范围内。
8.采用本发明后,利用数字控制模块对尾电流大小与预设电流值比较的结果进行处理,然后控制h桥翻转来调整衰减模式,实现了根据外部因素实时自适应调节快/慢衰减的比例,从而确保h桥在各种工作状态下均能保持较好的性能,从而提高h桥电路驱动的电机性能。
附图说明
9.图1为现有h桥驱动电路原理图;图2为现有h桥驱动电路衰减模式曲线图;图3为本发明控制系统示意图;图4为本发明h桥衰减工作状态曲线图;图5为数字控制模块增内部运行逻辑图。
具体实施方式
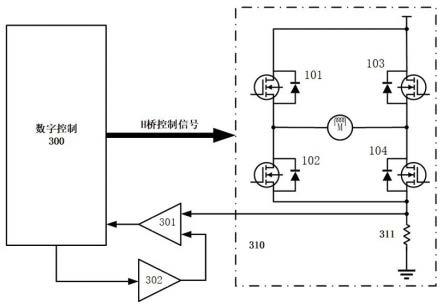
10.见图3至图5所示,一种应用于电机驱动的h桥自适应衰减控制系统,其包括h桥、数字控制模块300、模拟比较器301和数模转换器302,h桥由mos管101、mos管102、mos管103、mos管104、负载电机构成,数字控制模块300的控制信号输出端连接h桥的输入端、数字信号输出端连接数模转换器302的输入端,数模转换器302的输出端连接模拟比较器301的一个
输入端,h桥的输出端连接模拟比较器301的另一个输入端和尾电流感应电阻311,模拟比较器301比较尾电流大小与数字控制模块300的预设电流值,并将比较结果发送到数字控制模块300,h桥将根据数字控制模块300给出的比较信号翻转来调整衰减模式。数字控制模块300提供给数模转换器302的数字信号会随着其内部状态的不同而不同,从而可以让模拟比较器301完成对多种电平值的比较,主要依据h桥的尾电流的状态判断和调整h桥衰减工作状态,本实施例中是给出来尾电流感应电阻311,有可能包含附属的滤波器件,为了简化没有示出,对本发明原理描述没有影响。
11.根据图4,电流目标值409、电流容差值410均为数字控制模块300根据工作状态发送给数模转换器302的数字值,h桥将根据模拟比较器301给出的比较信号翻转来调整其衰减模式,在一个pwm驱动波形的工作周期中,当尾电流处于电流目标值与电流容差值之间时,h桥采用快衰减模式,当尾电流小于电流容差值时,h桥采用慢衰减模式。
12.当尾电流没有在电流目标值获得期内达到电流预设值时,数字控制模块300调整电流容差值实现h桥快、慢衰减模式的比例,下面详细进行说明:根据图4,周期400为h桥的一个pwm驱动波形的工作周期,其余周期与此类似;其中402为禁止期,由于h桥的尾电流在mos开关切换的过程中容易产生脉冲,为了避免这些脉冲对于控制系统的不利影响,在h桥的mos管101、mos管104打开后将有一个短时间的禁止期,在此期间数字控制模块300对模拟比较器的输出结果没有响应;401是电流目标值获得期,数字控制模块300预设h桥尾电流应该在此周期内达到电流预设值,即模拟比较器302比较信号将在此周期内进行翻转,如果没有,数字控制模块300将调整电流容差值410,即变化电流容差值410与电流目标值409的差异407。由于数字控制模块300对于差异407的调整等同于调整h桥快/慢衰减的比例,由图4看出这个比例可以在0%~100%之间进行调整,这种调整将导致模拟比较器302的比较结果翻转点411、412在时间轴上水平移动,翻转点411为快衰减翻转点、412为慢衰减翻转点。
13.在包含至少两个pwm驱动波形的工作周期中,当上一个工作周期的衰减不足时,尾电流在禁止期402内大于电流目标值,则数字控制模块300降低电流容差值410而提高电流容差值410和电流目标值409的差异,让快衰减比例增大,快衰减翻转点411向后移动(即时间轴上向右移动)直到落入电流目标值获得期401内;当上一个工作周期的衰减过大或电流波形发生较大变化时,尾电流在电流目标值获得期401结束时也没有达到电流目标值409,则数字控制模块300增大电流容差值410而降低电流容差值410和电流目标值409的差异,慢衰减比例增大,快衰减翻转点411向前移动直到落入电流目标值获得期401内;当上一个工作周期的衰减正常时,尾电流在电流目标值获得期401达到电流目标值109,如达到时刻没有落在预设的最佳目标点408上,则数字控制模块300增大或减小电流容差值410来调节快、慢衰减的比例,快衰减翻转点411逐步向最佳目标点408接近直至达到控制误差范围内,由于这个调整的量级较小,所以数字控制模块300在这个过程中将采用较小的调整步进,从而达到微调的效果。
14.数字控制模块300的内部运行逻辑如图5所示,基本上存在两个检测/调整环路,每次判断/调整将使用一个pwm周期;然后在下一个周期重复整个判断流程;系统在第一个周期将使用预先设定的初始值,这些初始值包括:电流目标值409、电流容差值410、禁止期402时间长度、电流目标值获得期401时间长度及最佳目标点408的位置,其中电流目标值409根据电机控制系统给出的当前时刻值进行调整,剩余值将根据前一个周期的值进行迭代调
整;通过以上机制可以保证本发明的自适应衰减控制系统能够实时根据h桥环境、工作状态的特征进行调整,最大限度的保证h桥采取最优的衰减方式,以达到最优的工作性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1