一种MMC阻抗模型建立方法、装置、存储介质及设备与流程
一种mmc阻抗模型建立方法、装置、存储介质及设备
技术领域
1.本技术涉及电力系统技术领域,特别是涉及一种mmc阻抗模型建立方法、装置、存储介质及电力设备。
背景技术:
2.模块化多电平换流器(modular multilevel converter,mmc)凭借其易于扩展、低谐波注入和功率因数可控等优点在高压直流输电系统中得到了广泛的应用。传统的mmc采用电流矢量控制,并依靠锁相环采集并网点电压相位保持与电网间的同步,但其具有无法为系统提供有效的电压和频率支撑,以及接入弱电网时传输功率受限甚至不能正常工作的问题。基于上述原因,功率同步控制方式被提出。功率同步控制的核心思想是使mmc模拟同步发电机的特性,采用功率同步环取代锁相环实现与电网间的同步。另外,功率同步控制还可以使mmc具备惯性支撑能力,因而具有广阔的应用前景。
3.然而,mmc作为具有宽频响应特性的电力电子装置,其与电网中其他装置的交互可能会使系统在宽频段内出现谐振不稳定问题。为了分析mmc接入电网后的谐振稳定性问题,通常需要建立mmc的阻抗模型。目前,对mmc的阻抗建模主要集中在传统的控制方式下,如定功率控制和定直流电压控制等。
4.因此,亟需提供一种功率同步控制方式下mmc的阻抗模型建立方法,以保障工程安全的稳定运行。
技术实现要素:
5.基于此,有必要针对上述技术问题,提供一种能够在功率同步控制方式下,保障工程安全的稳定运行的mmc阻抗模型建立方法、装置、存储介质及电力设备。
6.本发明实施例提供了一种mmc阻抗模型建立方法,适用于一高压直流输电的控制系统,所述方法包括以下步骤:
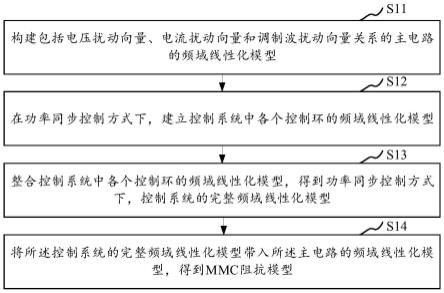
7.构建包括电压扰动向量、电流扰动向量和调制波扰动向量关系的主电路的频域线性化模型;
8.在功率同步控制方式下,建立控制系统中各个控制环的频域线性化模型;
9.整合控制系统中各个控制环的频域线性化模型,得到功率同步控制方式下,控制系统的完整频域线性化模型;
10.将所述控制系统的完整频域线性化模型带入所述主电路的频域线性化模型,得到mmc阻抗模型。
11.进一步地,所述方法还包括:
12.根据所述mmc阻抗模型得到频域中mmc的端口导纳矩阵;
13.选取所述端口导纳矩阵中对应扰动频率的元素,根据对应扰动频率的元素,得到该频率下mmc的端口阻抗。
14.进一步地,所述主电路的频域线性化模型为:
[0015][0016]
其中,δu
pcc
为mmc并网点电压的扰动量,δu
dc
为mmc直流电压的扰动量,δi
ac
为并网点电流的扰动量,δi
cm
为内部环流的扰动量,δm
dm
和δm
cm
分别为调制波扰动量的差模分量和共模分量,在频域中上述各变量均为矩阵;δu
pcc
和δu
dc
构成电压扰动量向量δu,δi
ac
和δi
cm
构成电流扰动量向量δi,δm
dm
和δm
cm
构成调制波扰动量向量δm,ki为并网点电流的扰动量和内部环流的扰动量之间的系数矩阵,km为调制波扰动量的差模分量和共模分量之间的系数矩阵,具体表达式如下:
[0017][0018][0019]
式中,r0,l0,c分别为mmc桥臂等效电阻、等效电感和子模块电容,l
t
为换流变压器漏电感,n为每个桥臂所包含的子模块数,i
ac
为并网点电流稳态量,i
cm
为内部环流稳态量,m
dm
和m
cm
分别为调制波稳态量的差模分量和共模分量,u
cdm
和u
ccm
分别为子模块平均电容电压的差模分量和共模分量,e为单位矩阵,d为频域中表示微分运算的矩阵。
[0020]
进一步地,所述控制系统中的控制环包括有功率同步环、无功-电压控制环、输出电流跟踪控制环和环流抑制控制环。
[0021]
进一步地,所述功率同步环的频域线性化模型为:
[0022]
δθ=-g
psl
δp
[0023]
其中,δθ为功率同步环输出角度的扰动量,g
psl
为对应功率同步环的传递函数矩阵,δp为mmc输出有功功率的扰动量,可以表示为:
[0024]
δp=u
pccα
δi
acα
+u
pccβ
δi
acβ
+i
acα
δu
pccα
+i
acβ
δu
pccβ
[0025]
式中,变量的下标α和β分别表示对应变量的α轴分量和β轴分量,由克拉克变换产生,其变换过程可以表示为:
[0026][0027]
式中,t
α
和t
β
表示克拉克变换中到α轴和β轴的变换矩阵,δx为任意频域变量;
[0028]
所述无功-电压控制环的频域线性化模型为:
[0029]
δu
ref
=-g
q-u
δq
[0030]
其中,δu
ref
为电压指令值扰动量,是根据换流器输出无功功率的扰动量δq生成的,g
q-u
为由无功-电压下垂系数构成的对角矩阵,而δq可以表示为:
[0031]
δq=u
pccβ
δi
acα-u
pccα
δi
acβ-i
acβ
δu
pccα
+i
acα
δu
pccβ
[0032]
电压指令值扰动量δu
ref
的dq轴电流指令值扰动量δi
dref
和δi
qref
为:
[0033][0034]
其中,g
uac
对应电压控制中所用pi控制器的传递函数矩阵,δu
pccd
和δu
pccq
分别表示并网点电压扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0035][0036]
式中,u
′
d+
和u
′
q+
分别表示扰动角度与并网点电压扰动量的dq轴分量之间的系数,t
d+
和t
q+
分别表示派克变换中到d轴和q轴的变换矩阵;
[0037]
所述输出电流跟踪控制的频域线性化模型为:
[0038][0039]
式中,g
iac
对应输出电流跟踪控制中所用pi控制器的传递函数矩阵,ki为所用的dq轴解耦系数,δi
acd
和δi
acq
分别表示并网点电流扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0040][0041]
式中,i
′
d+
和i
′
q+
分别表示扰动角度与并网点电流扰动量的dq轴分量之间的系数;
[0042]
所述环流抑制控制的频域线性化模型为:
[0043][0044]
其中,gc对应环流抑制控制中所用pi控制器的传递函数矩阵,kc为所用的dq轴解耦系数,δi
cmd
和δi
cmq
分别表示内部环流扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0045][0046]
式中,i
′
cmd+
和i
′
cmq+
分别表示扰动角度与内部环流扰动量的dq轴分量之间的系数,t
d+(-2)
和t
q+(-2)
为环流抑制控制所用的派克变换中到d轴和q轴的变换矩阵。
[0047]
进一步地,所述控制系统的完整频域线性化模型为:
[0048][0049]
其中,gi表示整合各个控制环节频域线性化模型后,并网点电流的扰动量和内部环流的扰动量之间的系数矩阵,gu表示整合各个控制环节频域线性化模型后,调制波扰动量的差模分量和共模分量之间的系数矩阵,其元素具体为:
[0050][0051][0052][0053]
式中,t
d-和t
q-为对差模调制波扰动量的dq轴分量δm
dmd
、δm
dmq
施加派克反变换,并得到最终的差模调制波扰动量δm
dm
时用到的变换矩阵,m
′
dmd-和m
′
dmq-表示派克反变换时变换角度的扰动量δθ对δm
dm
的影响;t
d-(-2)
和t
q-(-2)
为对共模调制波扰动量的dq轴分量δm
cmd
、δm
cmq
施加派克反变换,并得到最终的共模调制波扰动量δm
cm
时用到的变换矩阵,m
′
cmd-和m
′
cmq-表示了派克反变换时变换角度的扰动量δθ对δm
cm
的影响。
[0054]
进一步地,所述mmc阻抗模型的获取方法包括:
[0055]
将所述控制系统的完整频域线性化模型带入所述主电路的频域线性化模型,消除调制波扰动向量,得到电压扰动向量和电流扰动向量之间的关系;其中,电压扰动向量和电流扰动向量之间的关系为:
[0056]
δi=(ki+k
mgi
)-1
(e-k
mgu
)δu=yδu
[0057]
其中,y为mmc的端口导纳矩阵,mmc在扰动频率ω
p
处的端口阻抗为:
[0058][0059]
式中y(h+1,h+1)表示y矩阵中第h+1行第h+1列的元素。
[0060]
本发明的另一实施例提出一种mmc阻抗模型建立装置,所述装置包括:
[0061]
主电路模型创建模块,用于构建包括电压扰动向量、电流扰动向量和调制波扰动向量关系的主电路的频域线性化模型;
[0062]
控制系统模型创建模块,用于在功率同步控制方式下,建立控制系统中各个控制环的频域线性化模型;
[0063]
控制环模型整合模块,用于整合控制系统中各个控制环的频域线性化模型,得到功率同步控制方式下,控制系统的完整频域线性化模型;
[0064]
端口导纳获取模块,用于将所述控制系统的完整频域线性化模型带入所述主电路的频域线性化模型,得到mmc阻抗模型。
[0065]
本发明的另一个实施例还提出一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序;其中,所述计算机程序在运行时控制所述计算机可读存储介质所在的设备执行如上所述的mmc阻抗模型建立方法。
[0066]
本发明的另一个实施例还提出一种电力设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现如上所述的mmc阻抗模型建立方法。
[0067]
上述mmc阻抗模型建立方法,首先构建包括电压扰动向量、电流扰动向量和调制波扰动向量关系的主电路的频域线性化模型;在功率同步控制方式下,建立控制系统中各个控制环的频域线性化模型;整合控制系统中各个控制环的频域线性化模型,得到功率同步控制方式下,控制系统的完整频域线性化模型;将所述控制系统的完整频域线性化模型带入所述主电路的频域线性化模型,得到mmc阻抗模型。相比现有技术,本发明考虑了完整的控制环节,所建立的阻抗模型可以准确地反映功率同步控制下mmc的等效阻抗。阻抗建模过程采用了分块处理的方式,分别形成了每个控制环节的频域线性化模型,可以方便地确定具体控制环节对mmc整体阻抗特性的影响,为保障工程安全稳定运行提供必要条件,满足了实际应用需求。
附图说明
[0068]
图1为本发明实施例提供的mmc阻抗模型建立方法的一种流程示意图;
[0069]
图2为mmc主电路拓扑结构图;
[0070]
图3为功率同步控制的控制框图;
[0071]
图4为本实施示例中所建立的功率同步控制方式下mmc阻抗模型与仿真扫频实验的结果对比图;
[0072]
图5为本发明实施例提供的mmc阻抗模型建立装置的结构框图;
[0073]
图6为本发明实施例提供的电力设备的结构图。
具体实施方式
[0074]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本技术领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0075]
需要说明的是,文中的步骤编号,仅为了方便具体实施例的解释,不作为限定步骤执行先后顺序的作用。本实施例提供的方法可以由相关的服务器执行,且下文均以服务器作为执行主体为例进行说明。
[0076]
如图1至图3所示,本发明实施例提供的mmc阻抗模型建立方法,适用于一高压直流输电的控制系统,所述方法包括步骤s11至步骤s14:
[0077]
步骤s11,构建包括电压扰动向量、电流扰动向量和调制波扰动向量关系的主电路的频域线性化模型。
[0078]
请参阅图2所示的mmc主电路拓扑结构图,首先根据所述mmc主电路拓扑结构图,建立mmc主电路的时域方程,然后将mmc主电路的时域方程转化到频域,进行线性化,得到频域中mmc主电路的线性化模型,即主电路的频域线性化模型,并将所述主电路的频域线性化模型转化为电压扰动向量δu,电流扰动向量δi和调制波扰动向量δm之间的关系。
[0079]
所述主电路的频域线性化模型为:
[0080][0081]
其中,δu
pcc
为mmc并网点电压的扰动量,δu
dc
为mmc直流电压的扰动量,δi
ac
为并网点电流的扰动量,δi
cm
为内部环流的扰动量,δm
dm
和δm
cm
分别为调制波扰动量的差模分量和共模分量,在频域中上述各变量均为矩阵;δu
pcc
和δu
dc
构成电压扰动量向量δu,δi
ac
和δi
cm
构成电流扰动量向量δi,δm
dm
和δm
cm
构成调制波扰动量向量δm,ki为并网点电流的扰动量和内部环流的扰动量之间的系数矩阵,km为调制波扰动量的差模分量和共模分量之间的系数矩阵,具体表达式如下:
[0082]
[0083][0084]
式中,r0,l0,c分别为mmc桥臂等效电阻、等效电感和子模块电容,l
t
为换流变压器漏电感,n为每个桥臂所包含的子模块数,i
ac
为并网点电流稳态量,i
cm
为内部环流稳态量,m
dm
和m
cm
分别为调制波稳态量的差模分量和共模分量,u
cdm
和u
ccm
分别为子模块平均电容电压的差模分量和共模分量,e为单位矩阵,d为频域中表示微分运算的矩阵。
[0085]
步骤s12,在功率同步控制方式下,建立控制系统中各个控制环的频域线性化模型。
[0086]
请参阅图3所示的功率同步控制的控制框图,根据mmc采用功率同步控制时的控制系统框图,建立控制系统中每个控制环节的频域线性化模型。mmc采用功率同步控制时,控制系统中包含的具体控制环包括有功率同步环、无功-电压控制环、输出电流跟踪控制环和环流抑制控制环。
[0087]
所述功率同步环的频域线性化模型为:
[0088]
δθ=-g
psl
δp
[0089]
其中,δθ为功率同步环输出角度的扰动量,g
psl
为对应功率同步环的传递函数矩阵,δp为mmc输出有功功率的扰动量,可以表示为:
[0090]
δp=u
pccα
δi
acα
+u
pccβ
δi
acβ
+i
acα
δu
pccα
+i
acβ
δu
pccβ
[0091]
式中,变量的下标α和β分别表示对应变量的α轴分量和β轴分量,由克拉克变换产生,其变换过程可以表示为:
[0092][0093]
式中,t
α
和t
β
表示克拉克变换中到α轴和β轴的变换矩阵,δx为任意频域变量;
[0094]
所述无功-电压控制环的频域线性化模型为:
[0095]
δu
ref
=-g
q-u
δq
[0096]
其中,δu
ref
为电压指令值扰动量,是根据换流器输出无功功率的扰动量δq生成的;g
q-u
由无功-电压下垂系数g
q-u
构成的对角矩阵,而δq可以表示为:
[0097]
δq=u
pccβ
δi
acα-u
pccα
δi
acβ-i
acβ
δu
pccα
+i
acα
δu
pccβ
[0098]
电压指令值扰动量δu
ref
的dq轴电流指令值扰动量δi
dref
和δi
qref
为:
[0099][0100]
其中,g
uac
对应电压控制中所用pi控制器的传递函数矩阵,δu
pccd
和δu
pccq
分别表示并网点电压扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0101][0102]
其中,u
′
d+
和u
′
q+
分别表示扰动角度与并网点电压扰动量的dq轴分量之间的系数,t
d+
和t
q+
分别表示派克变换中到d轴和q轴的变换矩阵;
[0103]
所述输出电流跟踪控制的频域线性化模型为:
[0104][0105]
其中,g
iac
对应输出电流跟踪控制中所用pi控制器的传递函数矩阵;ki为所用的dq轴解耦系数,δi
acd
和δi
acq
分别表示并网点电流扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0106][0107]
式中,i
′
d+
和i
′
q+
分别表示扰动角度与并网点电流扰动量的dq轴分量之间的系数;
[0108]
所述环流抑制控制的频域线性化模型为:
[0109][0110]
其中,gc对应环流抑制控制中所用pi控制器的传递函数矩阵,kc为所用的dq轴解耦系数,δi
cmd
和δi
cmq
分别表示内部环流扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0111][0112]
式中,i
′
cmd+
和i
′
cmq+
分别表示扰动角度与内部环流扰动量的dq轴分量之间的系数,t
d+(-2)
和t
q+(-2)
为环流抑制控制所用的派克变换中到d轴和q轴的变换矩阵。
[0113]
步骤s13,整合控制系统中各个控制环的频域线性化模型,得到功率同步控制方式下,控制系统的完整频域线性化模型。
[0114]
如上所述,根据控制系统中不同控制环间的关系,对所述各个控制环的频域线性化模型进行整合计算,形成功率同步控制方式下,控制系统的完整频域线性化模型,即把控制系统输出的调制波扰动向量δm用电压扰动向量δu和电流扰动向量δi表示。
[0115]
所述控制系统的完整频域线性化模型为:
[0116][0117]
其中,gi表示整合各个控制环节频域线性化模型后,并网点电流的扰动量和内部环流的扰动量之间的系数矩阵,gu表示整合各个控制环节频域线性化模型后,调制波扰动量的差模分量和共模分量之间的系数矩阵,其元素具体为:
[0118][0119][0120][0121]
式中,t
d-和t
q-为对差模调制波扰动量的dq轴分量δm
dmd
、δm
dmq
施加派克反变换,并得到最终的差模调制波扰动量δm
dm
时用到的变换矩阵,m
′
dmd-和m
′
dmq-表示派克反变换时变换角度的扰动量δθ对δm
dm
的影响;t
d-(-2)
和t
q-(-2)
为对共模调制波扰动量的dq轴分量δm
cmd
、δm
cmq
施加派克反变换,并得到最终的共模调制波扰动量δm
cm
时用到的变换矩阵,m
′
cmd-和m
′
cmq-表示了派克反变换时变换角度的扰动量δθ对δm
cm
的影响。
[0122]
步骤s14,将所述控制系统的完整频域线性化模型带入所述主电路的频域线性化模型,得到mmc阻抗模型。
[0123]
如上所述,将所述的控制系统的完整频域线性化模型代入所述主电路的频域线性化模型,消去调制波扰动向量δm,得到mmc阻抗模型,即得到电压扰动向量δu和电流扰动向量δi之间的关系;然后根据所述mmc阻抗模型得到频域中mmc的端口导纳矩阵y;选取所述端口导纳矩阵y中对应扰动频率的元素,根据对应扰动频率的元素,得到该频率下mmc的端口阻抗。
[0124]
其中,mmc阻抗模型,即电压扰动向量和电流扰动向量之间的关系为:
[0125]
δi=(ki+k
mgi
)-1
(e-k
mgu
)δu=yδu
[0126]
式中,y为mmc的端口导纳矩阵,mmc在扰动频率ω
p
处的端口阻抗为:
[0127]
[0128]
式中y(h+1,h+1)表示y矩阵中第h+1行第h+1列的元素。
[0129]
进一步地,下面以基本参数如表1所示的采用功率同步控制的mmc为例,对本发明的应用进行介绍。
[0130]
表1
[0131][0132]
根据本发明所述建模步骤,对表1中所示的mmc进行阻抗建模,其在1hz-1000hz频段内的端口阻抗曲线如附图4中的实线所示,附图4中的圆圈为在电磁暂态仿真软件中对表1所示的mmc进行仿真扫描所得的阻抗结果。可以看出,本发明所述建模方法得到的结果与仿真扫描得到的实际结果高度吻合,验证了本方法所建立模型的准确性。
[0133]
上述mmc阻抗模型建立方法,首先建立主电路的频域线性化模型,并将所述主电路的频域线性化模型,转化为电压扰动向量δu、电流扰动向量δi和调制波扰动向量δm之间的关系;建立功率同步控制方式下,控制系统中各个控制环的频域线性化模型;整合控制系统中各个控制环的频域线性化模型,得到功率同步控制方式下,控制系统的完整频域线性化模型;将所述控制系统的完整频域线性化模型带入所述主电路的频域线性化模型,得到
mmc阻抗模型。相比现有技术,本发明考虑了完整的控制环节,所建立的阻抗模型可以准确地反映功率同步控制下mmc的等效阻抗。阻抗建模过程采用了分块处理的方式,分别形成了每个控制环节的频域线性化模型,可以方便地确定具体控制环节对mmc整体阻抗特性的影响,为保障工程安全稳定运行提供必要条件,满足了实际应用需求。
[0134]
应该理解的是,虽然上述流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,上述流程图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0135]
请参阅图5,本发明提供还提供了一种mmc阻抗模型建立装置,适用于如上所述mmc阻抗模型建立方法,所述装置包括:
[0136]
主电路模型创建模块21,用于构建包括电压扰动向量、电流扰动向量和调制波扰动向量关系的主电路的频域线性化模型。
[0137]
进一步地,所述主电路的频域线性化模型为:
[0138][0139]
其中,δu
pcc
为mmc并网点电压的扰动量,δu
dc
为mmc直流电压的扰动量,δi
ac
为并网点电流的扰动量,δi
cm
为内部环流的扰动量,δm
dm
和δm
cm
分别为调制波扰动量的差模分量和共模分量,在频域中上述各变量均为矩阵;δu
pcc
和δu
dc
构成电压扰动量向量δu,δi
ac
和δi
cm
构成电流扰动量向量δi,δm
dm
和δm
cm
构成调制波扰动量向量δm,ki为并网点电流的扰动量和内部环流的扰动量之间的系数矩阵,km为调制波扰动量的差模分量和共模分量之间的系数矩阵,具体表达式如下:
[0140]
[0141][0142]
式中,r0,l0,c分别为mmc桥臂等效电阻、等效电感和子模块电容,l
t
为换流变压器漏电感,n为每个桥臂所包含的子模块数,i
ac
为并网点电流稳态量,i
cm
为内部环流稳态量,m
dm
和m
cm
分别为调制波稳态量的差模分量和共模分量,u
cdm
和u
ccm
分别为子模块平均电容电压的差模分量和共模分量,e为单位矩阵,d为频域中表示微分运算的矩阵。
[0143]
控制系统模型创建模块22,用于在功率同步控制方式下,建立控制系统中各个控制环的频域线性化模型。其中,所述控制系统中的控制环包括有功率同步环、无功-电压控制环、输出电流跟踪控制环和环流抑制控制环。
[0144]
进一步地,所述功率同步环的频域线性化模型为:
[0145]
δθ=-g
psl
δp
[0146]
其中,δθ为功率同步环输出角度的扰动量,g
psl
为对应功率同步环的传递函数矩阵,δp为mmc输出有功功率的扰动量,可以表示为:
[0147]
δp=u
pccα
δi
acα
+u
pccβ
δi
acβ
+i
acα
δu
pccα
+i
acβ
δu
pccβ
[0148]
式中,变量的下标α和β分别表示对应变量的α轴分量和β轴分量,由克拉克变换产生,其变换过程可以表示为:
[0149][0150]
式中,t
α
和t
β
表示克拉克变换中到α轴和β轴的变换矩阵,δx为任意频域变量。
[0151]
进一步地,所述无功-电压控制环的频域线性化模型为:
[0152]
δu
ref
=-g
q-u
δq
[0153]
其中,δu
ref
为电压指令值扰动量,是根据换流器输出无功功率的扰动量δq生成的,g
q-u
由无功-电压下垂系数g
q-u
构成的对角矩阵,而δq可以表示为:
[0154]
δq=u
pccβ
δi
acα-u
pccα
δi
acβ-i
acβ
δu
pccα
+i
acα
δu
pccβ
[0155]
电压指令值扰动量δu
ref
的dq轴电流指令值扰动量δi
dref
和δi
qref
为:
[0156][0157]
式中,g
uac
对应电压控制中所用pi控制器的传递函数矩阵,δu
pccd
和δu
pccq
分别表示并网点电压扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0158][0159]
式中,u
′
d+
和u
′
q+
分别表示扰动角度与并网点电压扰动量的dq轴分量之间的系数,
t
d+
和t
q+
分别表示派克变换中到d轴和q轴的变换矩阵。
[0160]
进一步地,所述输出电流跟踪控制的频域线性化模型为:
[0161][0162]
其中,g
iac
对应输出电流跟踪控制中所用pi控制器的传递函数矩阵,ki为所用的dq轴解耦系数,δi
acd
和δi
acq
分别表示并网点电流扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0163][0164]
式中,i
′
d+
和i
′
q+
分别表示扰动角度与并网点电流扰动量的dq轴分量之间的系数。
[0165]
进一步地,所述环流抑制控制的频域线性化模型为:
[0166][0167]
式中,gc对应环流抑制控制中所用pi控制器的传递函数矩阵,kc为所用的dq轴解耦系数,δi
cmd
和δi
cmq
分别表示内部环流扰动量的d轴分量和q轴分量,由派克变换产生,其变换过程可以表示为:
[0168][0169]
式中,i
′
cmd+
和i
′
cmq+
分别表示扰动角度与内部环流扰动量的dq轴分量之间的系数,t
d+(-2)
和t
q+(-2)
为环流抑制控制所用的派克变换中到d轴和q轴的变换矩阵。
[0170]
控制环模型整合模块23,用于整合控制系统中各个控制环的频域线性化模型,得到功率同步控制方式下,控制系统的完整频域线性化模型。
[0171]
进一步地,所述控制系统的完整频域线性化模型为:
[0172][0173]
其中,gi表示整合各个控制环节频域线性化模型后,并网点电流的扰动量和内部环流的扰动量之间的系数矩阵,gu表示整合各个控制环节频域线性化模型后,调制波扰动量的差模分量和共模分量之间的系数矩阵,其元素具体为:
[0174]
[0175][0176][0177]
式中,t
d-和t
q-为对差模调制波扰动量的dq轴分量δm
dmd
、δm
dmq
施加派克反变换,并得到最终的差模调制波扰动量δm
dm
时用到的变换矩阵,m
′
dmd-和m
′
dmq-表示派克反变换时变换角度的扰动量δθ对δm
dm
的影响;t
d-(-2)
和t
q-(-2)
为对共模调制波扰动量的dq轴分量δm
cmd
、δm
cmq
施加派克反变换,并得到最终的共模调制波扰动量δm
cm
时用到的变换矩阵,m
′
cmd-和m
′
cmq-表示了派克反变换时变换角度的扰动量δθ对δm
cm
的影响。
[0178]
端口导纳获取模块24,用于将所述控制系统的完整频域线性化模型带入所述主电路的频域线性化模型,得到mmc阻抗模型。
[0179]
进一步地,所述mmc阻抗模型的获取方法包括:
[0180]
将所述的控制系统的完整频域线性化模型代入所述主电路的频域线性化模型,消去调制波扰动向量δm,得到mmc阻抗模型,即得到电压扰动向量δu和电流扰动向量δi之间的关系;然后根据所述mmc阻抗模型得到频域中mmc的端口导纳矩阵y;选取所述端口导纳矩阵y中对应扰动频率的元素,根据对应扰动频率的元素,得到该频率下mmc的端口阻抗。
[0181]
其中,mmc阻抗模型,即电压扰动向量和电流扰动向量之间的关系为:
[0182]
δi=(ki+k
mgi
)-1
(e-k
mgu
)δu=yδu
[0183]
式中,y为mmc的端口导纳矩阵,mmc在扰动频率ω
p
处的端口阻抗为:
[0184][0185]
式中y(h+1,h+1)表示y矩阵中第h+1行第h+1列的元素。
[0186]
本发明实施例所提供的mmc阻抗模型建立装置,首先建立主电路的频域线性化模型,并将所述主电路的频域线性化模型,转化为电压扰动向量δu、电流扰动向量δi和调制波扰动向量δm之间的关系;建立功率同步控制方式下,控制系统中各个控制环的频域线性化模型;整合控制系统中各个控制环的频域线性化模型,得到功率同步控制方式下,控制系统的完整频域线性化模型;将所述控制系统的完整频域线性化模型带入所述主电路的频域
线性化模型,得到mmc阻抗模型。相比现有技术,本发明考虑了完整的控制环节,所建立的阻抗模型可以准确地反映功率同步控制下mmc的等效阻抗。阻抗建模过程采用了分块处理的方式,分别形成了每个控制环节的频域线性化模型,可以方便地确定具体控制环节对mmc整体阻抗特性的影响,为保障工程安全稳定运行提供必要条件,满足了实际应用需求。
[0187]
本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序;其中,所述计算机程序在运行时控制所述计算机可读存储介质所在的设备执行如上所述的mmc阻抗模型建立方法。
[0188]
本发明实施例还提供了一种电力设备,参见图6所示,是本发明提供的一种电力设备的一个优选实施例的结构框图,所述电力设备包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现如上所述的mmc阻抗模型建立方法。
[0189]
优选地,所述计算机程序可以被分割成一个或多个模块/单元(如计算机程序1、计算机程序2、
······
),所述一个或者多个模块/单元被存储在所述存储器中,并由所述处理器执行,以完成本发明。所述一个或多个模块/单元可以是能够完成特定功能的一系列计算机程序指令段,该指令段用于描述所述计算机程序在所述电力设备中的执行过程。
[0190]
所述处理器可以是中央处理单元(central processing unit,cpu),还可以是其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现成可编程门阵列(field-programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等,通用处理器可以是微处理器,或者所述处理器也可以是任何常规的处理器,所述处理器是所述电力设备的控制中心,利用各种接口和线路连接所述电力设备的各个部分。
[0191]
所述存储器主要包括程序存储区和数据存储区,其中,程序存储区可存储操作系统、至少一个功能所需的应用程序等,数据存储区可存储相关数据等。此外,所述存储器可以是高速随机存取存储器,还可以是非易失性存储器,例如插接式硬盘,智能存储卡(smart media card,smc)、安全数字(secure digital,sd)卡和闪存卡(flash card)等,或所述存储器也可以是其他易失性固态存储器件。
[0192]
需要说明的是,上述电力设备可包括,但不仅限于,处理器、存储器,本领域技术人员可以理解,图6结构框图仅仅是电力设备的示例,并不构成对电力设备的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件。
[0193]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1