一种单相无刷直流电机的控制电路及控制方法
1.本发明属于电机驱动控制技术领域,公开了一种单相无刷直流电机用单相i/f电流幅值加功率因数补偿控制法。
背景技术:
2.无刷直流电机凭借其运行效率高、调速性能好等优点,广泛应用于电动汽车、民用家电、军事行业等领域。一方面,单相无刷直流电机由于定子绕组数的减小,控制电路的功率器件数量也随之减小,且本体结构的简化,使得控制系统的成本大大降低,在风机、泵类应用场合占据着绝对优势。
3.另一方面,无位置传感器控制技术可以克服位置传感器在体积结构、成本、温度、可靠性等方面带来的限制,满足小型单相无刷直流风机的技术特点,并进一步拓宽无刷直流电机在航空航天、军用工业的应用范围。
4.反电势法检测是目前无刷直流电机无位置传感器控制运用最为成熟的方法,由于单相电机在运行时无不通电绕组,无法直接测得反电势,已知技术中提出基于相电流分时复用的方法来实现对转子位置的检测,需提前关断功率开关管,使相电流归零并持续一段时间,容易使得电机电磁转矩产生波动,降低电机性能。
5.磁链观测法,通过相电压、电流积分得到磁链来估计转子位置,该方法要求主控芯片不断计算当前磁链并进行查表,将占用芯片大量的计算时间和内存,且易受电机参数变化影响,难以满足高低温的实验需求。
6.电流幅值/频率(i/f)控制与传统恒压频比(v/f)控制相比,增加了电流环,改善了电流响应,可防止起动阶段电流失控。然而,开环i/f控制无法保持调速及稳态情况下反电势与电流相位同步一致,存在易振荡、易失步、稳定性较差的缺点。
技术实现要素:
7.本发明提出一种单相无刷直流电机用单相i/f电流幅值加功率因数补偿控制法,其中i/f电流幅值控制方法是开环控制,通过离线给定电流幅值和斜坡转速下的位置角度,产生旋转的电磁场和电磁转矩,拖动转子运动。电流环采用了相电流幅值作为反馈,相对于相电流瞬时值反馈,可有效抑制反馈脉动带来的振荡。初始状态下,电压矢量v
δ
为0,此时δ轴与d轴重合、电流矢量与d轴重合,此时不产生电磁转矩;当电流环初始给定i
*
为一正值,同时给定位置角度给定θ
*
时,根据电流控制环方程,电压矢量ν
δ
增大,在电机绕组中产生旋转的电流矢量,此时功角逐渐增大,电磁转矩逐渐增大,电磁转矩大于负载转矩时电机开始旋转。由于风机类负载的起动负载转矩较小,采用电流幅值控制可以大大改善起动时的电流响应。
8.i/f控制有着算法简单,不依赖电机参数,电流响应良好等优势,但为使电机在受到干扰时拥有足够的稳定裕量,该方法需要将电流幅值设定为较大值,使得功角远离稳定区域边界,这将明显增加电机的无功损耗。功率因数补偿控制可以弥补开环i/f控制的缺
点,通过调节电流指令来控制反电势和电流的相位一致,其中v
δ
为瞬时电压幅值,u为反电势与电流同相位时的电压幅值,即理想电压幅值,其由采样电流、检测转速及电机本体参数,根据单相电机矢量图决定。当输出电压δ轴参考值v
δ*
与理想电压幅值u存在误差时,通过输出功率因数补偿环输出电流i
p
,控制电流控制环输出电压幅值。当电流超前于反电势时,输出电压δ轴参考值v
δ*
大于理想电压幅值,pi控制器减小给定电流指令;反之电流滞后反电势时,pi控制器增大给定电流指令。通过调节电流指令来降低电流的无功分量,控制电机运行于最佳功率因数状态,提高系统在稳态及调速范围内的稳定性和效率。
9.一种单相无刷直流电机的控制电路,包括,
10.功率因数补偿环,将理想电压幅值u和输出电压δ轴参考值v
δ*
进行调节后输出功率因数补偿环输出电流i
p
,
11.电流控制环,将功率因数补偿环输出电流i
p
、电流环初始给定i
*
和电流反馈值i进行调节后输出输出电压δ轴参考值v
δ*
,
12.pwm信号生成单元,根据输出电压δ轴参考值v
δ*
和位置角度给定θ
*
生成驱动信号,所述驱动信号控制电源电路中主功率开关,所述电源电路用于驱动所述电机,
13.其中,理想电压幅值u具体计算方法如下:
[0014][0015]
i为所述电机的电流反馈值,ωr为电机的转速,r为电机的绕组电阻值,l为电机的电感值,ψm为电机的磁链值。
[0016]
上述功率因数补偿环为pi调节器,理想电压幅值u和输出电压δ轴参考值v
δ*
作差后经过pi调节后输出功率因数补偿环输出电流i
p
。
[0017]
上述电流控制环为pi调节器,将输出功率因数补偿环输出电流i
p
和电流环初始给定i
*
求和得到电流环幅值给定i
*’,再与电流反馈值i作差进行pi调节后输出输出电压δ轴参考值v
δ*
。
[0018]
一种单相无刷直流电机的控制方法,包括,
[0019]
步骤s1,将理想电压幅值u和输出电压δ轴参考值v
δ*
进行调节后输出功率因数补偿环输出电流i
p
,所述理想电压幅值u具体计算方法如下:
[0020][0021]
i为所述电机的电流反馈值,ωr为电机的转速,r为电机的绕组电阻值,l为电机的电感值,ψm为电机的磁链值。
[0022]
步骤s2,将功率因数补偿环输出电流i
p
、电流环初始给定i
*
和电流反馈值i进行调节后输出输出电压δ轴参考值v
δ*
,
[0023]
步骤s3,根据输出电压δ轴参考值v
δ*
和位置角度给定θ
*
生成驱动信号,所述驱动信号控制电源电路中主功率开关,所述电源电路用于驱动所述电机。
[0024]
上述步骤s1将理想电压幅值u和输出电压δ轴参考值v
δ*
进行pi调节后输出功率因数补偿环输出电流i
p
。
[0025]
上述步骤s2,将功率因数补偿环输出电流i
p
、电流环初始给定i
*
和电流反馈值i进行pi调节后输出输出电压δ轴参考值v
δ*
。
[0026]
上述步骤s3,根据输出电压δ轴参考值v
δ*
和位置角度给定θ
*
使用svpwm的方式生成
驱动信号。
[0027]
有益效果,本发明所提出的一种单相无刷直流电机用单相i/f电流幅值加功率因数补偿控制法,能控制单相无刷直流电机的反电势与电流矢量保持相位一致,可使电机运行于最大转矩/电流比状态,改善电机在稳态及起动调速范围转速和电流的收敛性能,提高电机的效率和稳定性。从而,这种控制方法可以解决在特定工况下的工程问题。因此,通过功率因数补偿来控制反电势与电流相位,使电机运行于最佳功率因数状态,优化电机性能和效率。功率因数补偿可通过调节频率给定或者电流幅值来实现,
[0028]
本发明采用单相i/f电流幅值控制,将电流采样幅值作为电流环反馈,降低了电流环输出振荡和算法执行的复杂度,提高了系统的抗扰动能力;通过逆变器瞬时输出电压幅值和实时计算的理想电压幅值误差反馈调节给定电流幅值,实现功率因数补偿,使电机运行于最大转矩/电流比状态,改善电机在稳态及起动调速范围转速和电流的收敛性能,提高电机的效率和稳定性。
[0029]
本发明中单相无刷直流风机通过i/f电流幅值加功率因数补偿控制,其中如何在调速范围内实现功率因数补偿,使电机运行于最佳功率因数状态是控制上的难点。
[0030]
为让发明的上述特征和优点能更明显易懂,下文特举实施例,并配合所附图式作详细说明如下。
附图说明
[0031]
图1为单相无刷直流电机i/f加功率因数补偿控制示意图;
[0032]
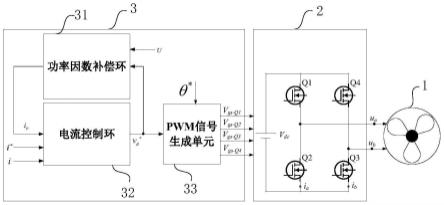
图2为单相i/f加功率因数补偿控制框图;
[0033]
图3为单相电机空间矢量图;
[0034]
图4为单相电机最佳功率因数矢量图;
[0035]
图5为本发明控制方法流程图。
[0036]
图中标号说明:ω
r*
为γ-δ空间电压矢量轴转速,ωr为d-q旋转坐标系转速。ν
γ
、ν
δ
为γ-δ轴下的电压,i
γ
、i
δ
为γ-δ轴下的电流。i
*
、i
*’、i
p
分别为电流环初始给定、功率因数补偿环输出电流、电流环最终给定信号,u、ν
δ*
、δν
δ
分别为理想电压幅值、输出电压δ轴参考值、功率因数补偿环输入电压误差信号,θ
*
、ω
r*
分别是位置角度给定和斜坡转速给定信号,i、ωr分别是电流反馈和转速检测信号,r、l、ψm分别为电机绕组电阻、电感以及磁链参数。
具体实施方式
[0037]
为使本发明实施例的目的和技术方案更加清楚,附上本发明实施例的图如下,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0038]
如图1所示,为本发明单相无刷直流电机控制系统图示意图,电机1为单相无刷直流电机,两对极电机,电源电路2将直流母线电压vdc经过逆变成单相交流电通入电机1的相绕组给电机1供电,产生旋转磁场和电磁转矩,拖动电机1旋转。控制电路3通过单相i/f电流幅值控制加功率因数补偿控制方法,产生电源电路2中开关q1/q2/q3/q4的控制信号,使电机2的反电势与电流相位保持一致,电机运行于最佳功率因数状态。电源电路2为逆变电路,
本发明中仅以全桥逆变拓扑为例进行说明。开关q1/q2/q3/q4组成全桥逆变电路,将直流电v
dc
逆变为交流电ua和ub。
[0039]
所述控制电路3包括功率因数补偿环31、电流控制环32和pwm信号生成单元33,功率因数补偿环31将理想电压幅值u和输出电压δ轴参考值v
δ*
进行调节后输出功率因数补偿环输出电流i
p
,电流控制环32将功率因数补偿环输出电流i
p
、电流环初始给定i
*
和电流反馈值i进行调节后输出逆变器输出电压δ轴参考值v
δ*
。pwm信号生成单元33根据输出电压δ轴参考值v
δ*
和位置角度给定θ
*
生成驱动信号v
gs-q1
/v
gs-q2
/v
gs-q3
/v
gs-q4
。
[0040]
理想电压幅值u具体计算方法如下:
[0041][0042]
其中,i为电流反馈值,ωr为电机1的转速,r为电机1的绕组电阻值,l为电机1的电感值,ψm为电机1的磁链值。
[0043]
电流环初始给定i
*
为程序离线给定的电流幅值;电流反馈值i为采样得到的电机1相绕组电流,经过一阶低通滤波环节得到;ω
r*
为斜坡转速给定信号,其经过积分得到位置角度给定信号θ
*
。
[0044]
如图3所示,根据电机双反应理论,建立电机1的空间矢量图,其包含两个参考坐标系,分别为描述电机1转子位置的d-q旋转坐标系和电机定子空间电压矢量给定的γ-δ参考系。其中d轴沿永磁体磁通方向定义,q轴沿单相电机反电势矢量定义方向,δ轴为单相逆变器输出电压矢量方向。其中δ为电压空间矢量γ-δ轴与电机转子矢量d-q轴的夹角,ω
r*
为γ-δ空间电压矢量轴转速,ωr为d-q旋转坐标系转速。ν
γ
、ν
δ
为γ-δ轴下的电压,i
γ
、i
δ
为γ-δ轴下的电流。
[0045]
如图4所示,ur=ir、u
l
=lωi分别代表电机1电阻、电感上的电压分量。如图4(a)所示为输出电压δ轴参考值v
δ*
等于理想电压幅值u,反电势e与相电流i同相位,电机运行于最佳功率因数状态;如图4(b)所示为输出电压δ轴参考值v
δ*
大于理想电压幅值u,此时反电势e滞后于相电流i,需要提高电流环幅值给定i
*’来使电机加速,保持反电势e与相电流i同相位;如图4(c)所示为输出电压δ轴参考值v
δ*
小于理想电压幅值u,此时反电势e超前于相电流i,需要降低电流环幅值给定i
*’来使电机减速,保持反电势e与相电流i同相位。
[0046]
如图2所示,为本发明一具体实施例,功率因数补偿环31为pi调节器,理想电压幅值u和输出电压δ轴参考值v
δ*
作差后经过pi调节后输出功率因数补偿环输出电流i
p
;电流控制环32将输出功率因数补偿环输出电流i
p
和电流环初始给定i
*
求和得到电流环幅值给定i
*’,再与电流反馈值i作差进行pi调节后输出输出电压δ轴参考值v
δ*
。
[0047]
对于单相电机而言,离线给定初始电流幅值i
*
与功率因数补偿环输出电流i
p
求和得到电流控制环给定电流幅值i
*’,通过两个下桥臂的电流传感器进行电流采样得到电流采样值ia和ib,软件判断得到二者中的较大值,由于单相电机电流近似为平顶波,将该较大值正向电流的平顶阶段经软件一阶低通滤波环节近似得到电流反馈值i,负向作用于电流控制环,电流控制环给定电流幅值i
*’与电流反馈值i的误差经过比例积分环节得到输出电压δ轴参考值v
δ*
,也即实际电压幅值:
[0048]vδ*
=k
p
(i
*'-i)+ki∫(i
*'-i)
[0049]
经过单相svpwm调制转换为占空比并发出pwm波,从而达到控制电机的目的。
[0050]
实际电压幅值与理想电压幅值u的误差经过pi调节器的比例积分环节得到电流指
令i
p
,正向叠加于电流初始给定,可得电流控制环方程:
[0051]ip
=k
pe
(v
δ*-u)+k
ie
∫(v
δ*-u)
[0052]i*'
=i
*
+i
p
[0053]
得到电流控制环最终的给定信号i
*’。也就是说,给定初始的电流和斜坡转速信号,输出电压幅值驱动单相逆变器形成旋转磁场,从而产生电磁转矩拖动电机旋转,并通过理想电压幅值与实际逆变器输出电压幅值的误差作用于功率因数补偿,从而调节电流环给定信号,使电机运行于最佳功率因数状态。
[0054]
单相i/f电流幅值控制方法是通过离线给定电流幅值以及斜坡转速,产生旋转的电磁场和电磁转矩,拖动转子运动。电流控制环采用了相电流幅值作为反馈,相对于相电流瞬时值反馈,可有效抑制反馈脉动带来的振荡。初始状态下,电压矢量ν
δ
为0,此时不产生电磁转矩;当给定电流幅值为一正值时,根据电流控制环pi控制器,电压矢量ν
δ
会增大,同时给定旋转的位置角度,此时功角逐渐增大,电机产生电磁转矩,当电磁转矩大于负载转矩时电机开始旋转。单相无刷直流电机用i/f电流幅值控制法有着算法简单,不依赖电机参数,电流响应良好等优势,但为使电机在受到干扰时拥有足够的稳定裕量,该方法需要将电流幅值设定为较大值,使得功角远离稳定区域边界,这将明显增加电机的无功损耗。功率因数补偿控制可以弥补开环i/f控制的缺点,通过闭环调节电流指令来控制反电势和电流的相位,降低电流的无功分量,提高系统在稳态及调速范围内的稳定性和效率。单相i/f功率因数补偿系统控制框图,在开环i/f控制的基础上加入了电压幅值补偿环,调节瞬时电流指令来保证电机运行于最佳功率因数状态。框图中v
δ
为瞬时电压幅值,u为理想电压幅值。当瞬时电压幅值与理想电压幅值存在误差时,通过pi控制器调节瞬时电流给定指令i
p
,控制电流控制环输出的电压幅值,保持相电流与反电势相位一致,电机运行于最佳功率因数状态。
[0055]
虽然本发明已以实施例揭露如上,然其并非用以限定本发明,任何所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,当可作些许的更动与润饰,故本发明的保护范围当视后附的申请专利范围所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1