适用于光储一体化系统的蓄电池能量协调控制方法
1.本发明涉及适用于光储一体化系统的蓄电池能量协调控制方法,属于蓄电池能量控制技术领域。
背景技术:
2.在光储一体化系统的实际应用中,蓄电池由于具有非线性特性,且在恶劣工作条件下会存在过度充放电的现象,会大大减少其使用寿命;尤其在内部参数和外部扰动剧烈变化时,会造成母线电压的波动,严重时会破坏整个系统的正常运行。因此,如何实现蓄电池的自抗扰,基于能量守恒实现多工作模式间的平滑和协调控制,是目前行业关注和研究的焦点。
3.现有光储一体化系统主要存在以下问题:
4.1)在光储一体化系统的工程应用中,多以阀控式铅酸蓄电池为主,其模型多以电化学模型为主,且多依赖电化学反应测试数据对参数进行求解,过程较复杂,且不利于蓄电池的能量管理和控制。在对光伏储能系统的蓄电池进行建模时,未考虑内部复杂参数对电池状态的影响,导致不能准确地表征蓄电池的性能状态;进而使蓄电池的建模结果不精确,因此无法为其制定恰当的能量管理和控制方法。
5.2)在光储一体化系统中,双向dc/dc变换器是连接蓄电池和直流微网的关键器件。然而dc/dc变换器具有非线性特性,现有研究中多将dc/dc变换器与直流微网相分割,这严重制约着系统的控制性能。
6.一方面,双向dc/dc变换器具有非线性特征,采用传统的线性误差反馈控制器较难取得理想的控制效果,其动态反应速度较慢,甚至当电路参数变化时会出现混沌或分岔等非线性现象;另一方面,直流微网存在电压变化范围大和负载非线性等特征,因此多针对双向dc/dc变换器设计非线性控制策略,来提高其整体系统的动态性能。
7.在实际光储一体化系统中,通常将双向dc/dc变换器与蓄电池和直流微网分割开,单独对其建模和设计控制器;其非线性控制的通常做法是:先通过微分几何原理与代数变换将其线性近似化,之后再设计pi控制器。然而,当双向dc/dc变换器电路拓扑较复杂时,其模型线性化处理过程较繁琐。尽管已有研究使用非线性函数对pi控制器进行修正,但其仅改善了单向dc/dc变换器的动态性能,无法适用于实际光储一体化系统的双向能量管理,因此,无法实现双向dc/dc变换器多工作模式的切换和能量协调控制需求。
技术实现要素:
8.针对现有对双向dc/dc变换器的非线性控制方法无法实现光储一体化系统双向能量协调控制的问题,本发明提供一种适用于光储一体化系统的蓄电池能量协调控制方法。
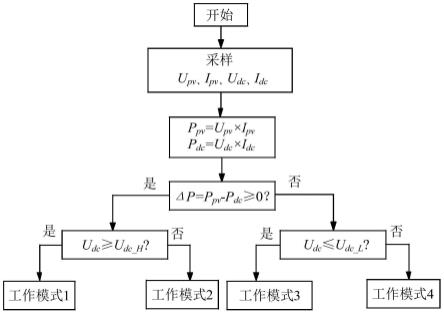
9.本发明的一种适用于光储一体化系统的蓄电池能量协调控制方法,所述光储一体化系统采用光伏板和蓄电池为负载供电,蓄电池通过双向直流变换器进行能量控制;包括,
10.采集光伏板输出电压u
pv
、输出电流i
pv
、直流母线电压u
dc
和负载电流i
dc
,计算光伏
板输出功率p
pv
和负载侧需求功率p
dc
:
11.若功率差值δp=p
pv-p
dc
≥0,则进一步对直流母线电压u
dc
与直流母线电压充电临界值u
dc_h
进行判断,若u
dc
≥u
dc_h
,则按预设工作模式1对蓄电池状态进行充电控制;若u
dc_l
《u
dc
《u
dc_h
,且电池电量soc》90%,则按预设工作模式2对蓄电池状态进行控制;u
dc_l
为直流母线电压放电临界值;
12.若功率差值δp=p
pv-p
dc
《0,则进一步对直流母线电压u
dc
与直流母线电压放电临界值u
dc_l
进行判断,若u
dc
≤u
dc_l
,则按预设工作模式3对蓄电池状态进行放电控制;若u
dc_l
《u
dc
《u
dc_h
,且电池电量soc《15%,则按预设工作模式4对蓄电池状态进行控制;
13.工作模式1的控制方法包括:使光伏板处于最大功率点,并基于采集的蓄电池端电压ub、直流母线电压u
dc
和电感电流i
l
对双向直流变换器的开关管进行控制,使双向直流变换器工作在buck模式,蓄电池为充电状态;
14.工作模式2的控制方法包括:使光伏板处于恒压模式,双向直流变换器处于停机状态,蓄电池为空闲状态;
15.工作模式3的控制方法包括:使光伏板处于最大功率点,并基于采集的蓄电池端电压ub、直流母线电压u
dc
和电感电流i
l
对双向直流变换器的开关管进行控制,使双向直流变换器工作在boost模式,蓄电池为放电状态;
16.工作模式4的控制方法包括:使光伏板处于最大功率点,双向直流变换器处于停机状态,蓄电池为空闲状态。
17.根据本发明的适用于光储一体化系统的蓄电池能量协调控制方法,工作模式1的实现过程包括:当蓄电池端电压ub低于恒压充电电压u
cv
,将恒压充电电压u
cv
与蓄电池端电压ub的差值经比例积分器pi2进行调节,经上限值为恒流充电电流i
cg
的限幅器k2限幅后首先输出i
cg
,将i
cg
作为可变限幅器k1的上限,实现蓄电池的快速恒流充电,随着蓄电池端电压ub升高,限幅器k2输出值减小,蓄电池充电放缓;
18.当蓄电池端电压ub高于恒压充电电压u
cv
,将恒压充电电压u
cv
与蓄电池端电压ub的差值经比例积分器pi2进行调节,调节结果经限幅器k2限幅后输出结果为0,将0作为可变限幅器k1的上限;直流母线电压u
dc
与直流母线电压放电临界值u
dc_l
的差值经比例积分器pi1进行调节,调节结果经可变限幅器k1以0为上限限幅,从而限制电感电流设定值i
l_set
《0,防止蓄电池过度充电。
19.根据本发明的适用于光储一体化系统的蓄电池能量协调控制方法,工作模式3的实现过程包括:当蓄电池端电压ub高于放电截止电压u
cg
,将放电截止电压u
cg
与蓄电池端电压ub的差值经比例积分器pi3进行调节,经上限值为最大放电电流i
cut
的限幅器k3限幅后首先输出i
cut
,将i
cut
作为可变限幅器k3的下限,实现蓄电池的最大电流放电,随着蓄电池端电压ub降低,限幅器k3输出增大,蓄电池放电变缓;
20.当蓄电池端电压ub低于放电截止电压u
cg
,将放电截止电压u
cg
与蓄电池端电压ub的差值经比例积分器pi3进行调节,调节结果经限幅器k3限幅后输出结果为0,将0作为可变限幅器k1的下限;直流母线电压u
dc
与直流母线电压放电临界值u
dc_l
的差值经比例积分器pi1进行调节,调节结果经可变限幅器k1以0为下限限幅,从而限制电感电流设定值i
l_set
》0,防止蓄电池过度放电。
21.根据本发明的适用于光储一体化系统的蓄电池能量协调控制方法,基于电感电流
设定值i
l_set
对双向直流变换器的开关管进行控制包括:
22.采用微分跟踪器td对电感电流设定值i
l_set
进行跟踪,跟踪值为x1;
23.将电感电流i
l
与跟踪值x1作差得到电流反馈误差e;将电流反馈误差e作为fal函数构造的非线性pi控制器的输入:
24.若|e|》δ,则fal函数构造的非线性pi控制器通过控制使电流反馈误差e快速趋近于0;
25.|e|≤δ,则fal函数构造的非线性pi控制器通过低通滤波特性对电流反馈误差e进行处理;
26.fal函数构造的非线性pi控制器的输出经过pwm调制后,输出对双向直流变换器的开关管控制信号;
27.式中δ为滤波因子。
28.根据本发明的适用于光储一体化系统的蓄电池能量协调控制方法,所述fal函数构造的非线性pi控制器的数据处理过程包括:
[0029][0030]
式中a为非线性因子。
[0031]
根据本发明的适用于光储一体化系统的蓄电池能量协调控制方法,所述蓄电池为阀控式铅酸蓄电池。
[0032]
本发明的有益效果:
[0033]
本发明方法提出一种电压—电流双闭环控制策略,即外环为直流母线电压控制环,内环为电流环,将蓄电池分为充电,放电以及空闲三种状态,通过电压外环来控制蓄电池的工作状态,以实现蓄电池的自抗扰功能。
[0034]
本发明方法综合考虑光伏输出功率、负载侧需求功率以及直流母线侧电压,基于能量守恒和协调控制实现蓄电池的多工作模式切换。
附图说明
[0035]
图1是本发明所述适用于光储一体化系统的蓄电池能量协调控制方法的多工作模式切换控制逻辑图;
[0036]
图2是对双向直流变换器的开关管进行控制的信号流程图;
[0037]
图3是工作模式1的能量流动示意图;
[0038]
图4是工作模式2的能量流动示意图;
[0039]
图5是工作模式3的能量流动示意图;
[0040]
图6是工作模式4的能量流动示意图;
[0041]
图7是蓄电池的等效电路模型图;图中t表示周期;
[0042]
图8是电流内环控制框图;图中k
p
表示比例环节,ki表示积分环节;
[0043]
图9是具体实施例中复杂光照下光照强度随时间变化的曲线图;
[0044]
图10是具体实施例中复杂光照下直流母线电压u
dc
随时间变化的曲线图;
[0045]
图11是是具体实施例中复杂光照下光伏板输出功率p
pv
随时间变化的曲线图;
point tracking,mppt)模式,并基于采集的蓄电池端电压ub、直流母线电压u
dc
和电感电流i
l
对双向直流变换器的开关管进行控制,使双向直流变换器工作在boost模式,蓄电池为放电状态;
[0061]
工作模式3多发生在光照不足的阴雨天,此时光伏阵列输出最大功率p
pv
不足以提供负载侧需求功率p
dc
,即p
pv
《p
dc
,直流母线电压u
dc
<u
dc_l
,此时蓄电池通过boost模式升压放电。可见,此模式下由光伏阵列和蓄电池共同向负载提供功率。
[0062]
工作模式4的控制方法包括:使光伏板处于最大功率点,双向直流变换器处于停机状态,蓄电池为空闲状态。
[0063]
工作模式4多发生在光照不足或者负载增加的情况,此时光伏发电功率仍低于负载需求,即p
pv
《p
dc
。考虑到此时蓄电池soc低于15%,为了避免蓄电池过度放电,buck/boost变换器应处于停机状态,而boost变换器维持最大功率点的工作状态。特别地,考虑到光伏输出功率提供持续不足,可由用户有选择地切除部分负载。四种工作模式以蓄电池电压-电流双闭环自抗扰控制器为基础,得益于基于微分控制器的自抗扰功能,蓄电池多工作模式的切换依托于蓄电池和光伏阵列的工作状态,其切换逻辑如图1所示。
[0064]
在图1中,首先对光伏侧、负载侧以及蓄电池侧电压电流u
pv
、i
pv
、u
dc
、i
dc
、ub、ib进行采样,继而根据光伏输出功率p
pv
与负载侧功率p
dc
关系判断蓄电池工作状态,进一步考虑到蓄电池本身充放电状态,决定具体工作模式。
[0065]
以系统当前工作在工作模式2为例,此时光照强度较高,光伏发电功率除了向负载流动,剩余部分向蓄电池充电。当蓄电池充电达到上限,u
dc
》u
dc_h
,则自动切换到工作模式1。若此时光照突然减弱,光伏发电不足以提供直流母线侧功率,则进入工作模式3,负载侧需求功率由蓄电池和光伏阵列共同提供。若此时光照强度持续较低,蓄电池荷电状态达到临界值,系统切换至工作模式4,由用户主动切除部分可调负载,使得系统迅速从工作模式3切换至工作模式4工作状态。当光照强度恢复为较强水平,系统则直接从模式4或模式3切换至模式2。
[0066]
进一步,结合图1和图2所示,工作模式1的实现过程包括:当蓄电池端电压ub低于恒压充电电压u
cv
,将恒压充电电压u
cv
与蓄电池端电压ub的差值经比例积分器pi2进行调节,经上限值为恒流充电电流i
cg
的限幅器k2限幅后首先输出i
cg
,将i
cg
作为可变限幅器k1的上限,实现蓄电池电压较低情况下的快速恒流充电,随着蓄电池端电压ub升高,限幅器k2输出值减小,蓄电池充电放缓;
[0067]
当蓄电池端电压ub高于恒压充电电压u
cv
,将恒压充电电压u
cv
与蓄电池端电压ub的差值经比例积分器pi2进行调节,调节结果经限幅器k2限幅后输出结果为0,将0作为可变限幅器k1的上限;直流母线电压u
dc
与直流母线电压放电临界值u
dc_l
的差值经比例积分器pi1进行调节,调节结果经可变限幅器k1以0为上限限幅,从而限制电感电流设定值i
l_set
《0,防止蓄电池过度充电。
[0068]
工作模式3的实现过程包括:当蓄电池端电压ub高于放电截止电压u
cg
,将放电截止电压u
cg
与蓄电池端电压ub的差值经比例积分器pi3进行调节,经上限值为最大放电电流i
cut
的限幅器k3限幅后首先输出i
cut
,将i
cut
作为可变限幅器k3的下限,实现蓄电池电压较高情况下的最大电流放电,随着蓄电池端电压ub降低,限幅器k3输出增大,蓄电池放电变缓;
[0069]
当蓄电池端电压ub低于放电截止电压u
cg
,将放电截止电压u
cg
与蓄电池端电压ub的
差值经比例积分器pi3进行调节,调节结果经限幅器k3限幅后输出结果为0,将0作为可变限幅器k1的下限;直流母线电压u
dc
与直流母线电压放电临界值u
dc_l
的差值经比例积分器pi1进行调节,调节结果经可变限幅器k1以0为下限限幅,从而限制电感电流设定值i
l_set
》0,防止蓄电池过度放电。
[0070]
本实施方式中基于蓄电池—双向dc/dc变换器—直流母线的联合模型,根据蓄电池和直流母线的功率波动,采用电压—电流双闭环控制策略,即外环为直流母线电压控制环,内环为电流环,将蓄电池分为充电,放电以及空闲三种状态,通过电压外环来控制蓄电池的工作状态,实现了蓄电池的自抗扰功能。结合图2所示,本实施方式考虑到直流母线的功率波动,以实际工程上常用pi控制方法为例,图2中上半段为电压电流双闭环控制框图,包括直流母线电压控制外环和电流内环,对应电压外环,根据直流母线电压放电临界值u
dc_l
和直流母线电压充电临界值u
dc_h
将蓄电池分为充电、放电以及空闲三种状态;对应电流内环,i
cut
和i
cg
分别是蓄电池最大放电电流和恒流充电电流,u
cv
和u
cg
分别为和恒压充电电压和放电截止电压值。
[0071]
假设蓄电池在充电过程中,直流母线电压u
dc
》u
dc_h
,当蓄电池电压ub高于恒压充电值u
cv
时,限幅器k2输出结果为0且作为可变限幅器k1的上限,从而限制电感电流设定值i
l_set
《0,实现蓄电池防过充。在放电过程中,u
dc
《u
dc_l
,当蓄电池电压ub低于放电截止电压u
cg
,此时限幅器k3下限值变为0,即电感电流设定值i
l_set
》0限制其放电。pi1、pi2和pi3分别对应各自控制模式中应用pi控制时的比例项。
[0072]
再进一步,基于电感电流设定值i
l_set
对双向直流变换器的开关管进行控制包括:
[0073]
采用微分跟踪器td对电感电流设定值i
l_set
进行跟踪,跟踪值为x1;
[0074]
将电感电流i
l
与跟踪值x1作差得到电流反馈误差e;将电流反馈误差e作为fal函数构造的非线性pi控制器的输入:
[0075]
若|e|》δ,则fal函数构造的非线性pi控制器通过控制使电流反馈误差e快速趋近于0;
[0076]
|e|≤δ,则fal函数构造的非线性pi控制器通过低通滤波特性对电流反馈误差e进行处理;
[0077]
fal函数构造的非线性pi控制器的输出经过pwm调制后,输出对双向直流变换器的开关管控制信号;
[0078]
式中δ为滤波因子。
[0079]
在蓄电池充放电过程中增加限幅环节能够避免过充和过放现象,引入微分跟踪器保证了蓄电池工作模式切换过程中的信号平滑性,避免了传统方法下由于信号突变引起的超调问题。电流内环首先通过td微分跟踪器对电流设定值i
l_set
进行跟踪,然后利用脉宽调制(pulse width modulation,pwm)方法驱动双向直流变换器。
[0080]
结合图2所示,对蓄电池—双向dc/dc变换器—直流母线联合建模。在建模方面,真实考虑蓄电池、双向dc/dc变换器和直流母线的连接关系,并着重对双向直流变换器,设计电压—电流双闭环控制策略,实现蓄电池的自抗扰、多工作模式切换的能量协调控制。
[0081]
蓄电池—双向dc/dc变换器—直流母线的联合建模:
[0082]
蓄电池模型建立:
[0083]
针对图2的蓄电池,以实际系统常用的阀控式铅酸蓄电池为例,区别于传统的电化
学模型,采用等效电路模型,如图7所示,其中e为电压源,r1、r2和c分别为电池内阻、极化电阻和电容,且存在以下电路关系,
[0084]
e=e
0-ke(273+θ)(1-soc),
[0085]
其中,e0为电池充满状态下的开路电压,ke为电压温度系数,通常由厂家提供,soc为电池电量,θ为电解液温度。
[0086]
真实考虑到电池内阻的变化可用于检测电池的劣化程度,再考虑到极化电阻、电容对电池动态性能的影响,可得到图7中阀控式铅酸蓄电池的等效电路参数表示为:
[0087][0088]
其中,r0为电池充满状态下的欧姆内阻,i0和im分别为电池标称电流和实际流过电流,a1、a2为常数,soc和doc为电池电量和健康状态表征,τ为时间常数,r
′0为常数电阻。
[0089]
由上式可知,电池工作过程中极化现象对系统输出的影响较大。这里定义电池放电电荷量为qc,初始电荷量为q0,则电池在充放电过程中电荷变化情况可表示为:
[0090][0091]
考虑到电解液的不同温度和不同工作电流对电池容量影响,令c0为电解液0℃下电池容量,i为电池放电电流,则有:
[0092][0093]
kc、k
t
和δ均为电池相关常数,可以由电池不同温度下测试数据计算,因此可以得到电池电量soc和电池健康状态doc表达式为:
[0094][0095]
其中i
av
=im/(τs+1)。
[0096]
基于以上分析,可见蓄电池等效模型的电路元件、电池容量、健康状态等参数的获取都需要考虑电池温度进行修正,结合实际工程经验,电池温度可以近似求解为:
[0097][0098]
其中,θ0为电池初始工作温度,θa为电池所处环境温度,r
θ
和c
θ
分别为电池热阻和比热容;进而可得到了阀控式铅酸蓄电池的等效模型。
[0099]
双向dc/dc变换器模型:
[0100]
针对图2中的双向dc/dc变换器,是连接蓄电池和直流母线的关键设备,承担着能
量双向流动和功率平衡的作用。考虑到储能系统对隔离绝缘无硬性需求,兼顾设备尺寸和性价比,本实施方式选择非隔离型双向buck/boost变换器,其中ub为蓄电池电压,s1和s2是开关管,l是电感,cb和c
dc
分别是蓄电池侧和负载侧的滤波电容。
[0101]
具体地,根据开关管s1和s2的不同状态可将系统分为boost升压模式和buck降压模式。当蓄电池需要充电时,开关管s2关断,s1由脉冲信号驱动。具体地,当s1导通时,电感吸收来自直流母线的能量,s1关断后,电感电流由于无法突变,继续向蓄电池侧释放能量。基于电感充放电能量守恒原理则有:
[0102][0103]
式中t
on
表示导通时间;
[0104]
当蓄电池放电时,开关管s1关断,对应的二极管锁定,对应开关管t1的导通和关断,电感分别释放和吸收能量,且在一个周期内守恒,蓄电池能量向直流母线侧负载流动,其电压关系为:
[0105][0106]
蓄电池电压-电流双闭环自抗扰控制器设计:
[0107]
针对图2蓄电池—双向dc/dc变换器—直流母线的联合建模与控制框图,电流内环首先通过微分跟踪器对电流设定值i
l_set
进行跟踪,其中x1为跟踪值,x2为x1的导数,且有界,其数学表达式为:
[0108][0109]
其中h为滤波因子,r为快慢因子。具体地,在实现过程中首先将各信号离散化处理,得到离散后微分跟踪器为:
[0110][0111]
式中h0为滤波因子h的初始值,为定义的中间变量,v(k)为i
l_set
的离散值。
[0112]
假设x(0)=[x1(0),x2(0)],为了使系统在最短时间内无超调到达控制目标,假设系统在k步到达稳态,对上式进行求解,并对1)k=1、2)k=2、3)k≥3三种不同情况分别讨论,得到最速控制综合函数fhan(x1,x2,r,h)为:
[0113][0114]
式中d、a0、y、a1、a2、sy、a和sa均为计算过程中的中间变量,其替换关系如上所示。
[0115]
再进一步,将电流采样值i
l
与跟踪量x1作差,令电流反馈误差e=i
l-x1,作为fal函数构造的非线性pi控制器输入,其控制框图如图8所示:
[0116]
所述fal函数构造的非线性pi控制器的数据处理过程包括:
[0117][0118]
式中a为非线性因子。
[0119]
即有当电流反馈误差|e|》δ时,非线性反馈使得系统状态迅速收敛至跟踪信号,即误差e迅速趋近于0;反之令k1=1/δ
1-a
,积分环节输出为y,则有y/x1=ki/(s/k1+1),具有一定的低通滤波特性。
[0120]
可见,当电流设定值突变时,得益于微分跟踪器的控制,跟踪信号x1可以平滑过渡,避免了传统pid由于信号突变引起的超调问题。
[0121]
作为示例,所述蓄电池可以但不限于采用阀控式铅酸蓄电池。
[0122]
具体实施例:
[0123]
下面通过仿真性能实验对本发明方法进行验证,其中,图2中的电路参数如表1所示,pi控制器参数比例项k
p
=0.24,积分项ki=340.5,双向buck/boost变换器中电感l=1mh,cb=440μf,基于fal函数的非线性pi控制器中k
p
=2.4,ki=41.6。
[0124]
表1系统电路参数
[0125]
[0126][0127]
考虑到真实光照较为复杂,下面以几种典型光照强度变化为例进行仿真,仿真结果如图9至图13所示,其中图9为模拟的一种多发生于晴朗多云天气的光照强度变化情况,考虑云层遮挡和运动,光照强度在1.5s时由1000w/m2阶跃上升到1500w/m2,4s时突降为500w/m2。图10为母线电压u
dc
的变换状况,可见启动阶段时母线电压低于u
dc_l
,系统工作在模式3,即蓄电池工作在放电状态,辅助光伏板共同补充负载所需能量。特别地,当负载侧电压较低时,得益于双向直流变换器控制策略中可变限幅环节,蓄电池以最大放电电流进行放电,随即进入正常放电模式,负载侧电压稳定在396v-405v,波动率约为1.25%,满足直流母线电压
±
10%稳态性能指标。图11为光伏输出功率p
pv
的变换状况,可见当光照强度突增时,光伏板实时跟踪最大功率点,输出功率由100w突增至172w,由于光伏侧发电功率大于负载功率需求,蓄电池切换为充电状态,图12为蓄电池电流ib的变换状况,此时系统切换至模式1,图13蓄电池soc呈线性上升;而当光照强度突降时,可见光伏输出功率稳定在32.8w左右难以满足负载需求,此时系统切换至模式3,蓄电池通过直流变换器放电,母线电压无超调稳定在400.6v。
[0128]
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1