基于无人机机械振动的除冰装置及其使用方法与流程
1.本发明属于输电线路除冰技术领域,具体涉及一种基于无人机机械振动的除冰装置及其使用方法。
背景技术:
2.随着电力系统的不断发展,电力规模不断增大,输电线路运行环境复杂多变,在秋冬交替和冬春交替季节常常伴随伴随冻雨气候,高坡、高岭、高海拔区段的输电线路表面会形成冻结的覆冰。覆冰随着持续降雨越积越厚,增大输电线路的质量,如不能及时清除,容易使得各处输电线路下陷或者断裂,严重影响输电线路的正常运行,甚至导致大面积停电,给人们生活带来不便,以及造成经济损失。
3.为了消除输电线路覆冰灾害,一旦覆冰超警戒值,通常采用热力融冰法除冰。热力融冰法是对整条输电线路进行融冰,但是如果输电线路存在隐性薄弱点,可能导致导线断线、影响机械性能、降低导线使用寿命等情况。由于覆冰区段所处位置偏僻,且电网公司规定覆冰状态下不能上塔,且人工除冰速度慢、效率低,且危险系数高。因此,本发明提供一种基于无人机机械振动的除冰装置。
技术实现要素:
4.本发明的目的是,提供一种基于无人机机械振动的除冰装置及其使用方法,解决现有技术采用热力融冰法存在导线断线风险、影响导线性能的问题,克服人工除冰效率低、危险系数大的困难。
5.本发明采用的技术方案是,基于无人机机械振动的除冰装置,包括无人机,所述无人机门台设有除冰装置,所述除冰装置包括安装架、控制箱、电动伸缩杆、拉杆、破冰触发杆和破冰锥形头,所述安装架顶端与无人机门台可拆卸固定连接,电动伸缩杆设于安装架底端且伸缩端与拉杆顶端连接,拉杆竖直向下且底端连接破冰触发杆顶端,破冰触发杆底端连接破冰锥形头,所述控制箱设置在安装架上部并与电动伸缩杆电连接。
6.优选地,所述拉杆底端与破冰触发杆顶端分别设有磁铁,拉杆下部和破冰触发杆上部外套设有装载壳,装载壳两侧分别设有固定板,固定板顶端与安装架连接,装载壳内设有隔板,隔板匹配破冰触发杆开设孔洞,破冰触发杆顶端通过孔洞贯穿隔板与拉杆底端连接,破冰触发杆位于隔板与装载壳之间的外部套设动力弹簧,动力弹簧顶端与隔板表面接触,底端与破冰触发杆固定连接。
7.优选地,所述动力弹簧受电动伸缩杆向上拉动拉杆收缩,动力弹簧最大回复力大于拉杆底端与破冰触发杆顶端的磁吸力。
8.优选地,所述拉杆顶端设有连接板,电动伸缩杆伸缩端与连接板采用螺栓连接,拉杆位于连接板与装载壳之间的外部套设复位弹簧,复位弹簧顶端与连接板固定连接,底端与装载壳固定连接,复位弹簧随拉杆向上移动而拉伸。
9.优选地,所述装载壳与固定板之间采用螺栓连接。
10.优选地,所述破冰锥形头与破冰触发杆底端螺纹连接。
11.优选地,所述控制箱包括arm处理器、arm处理器分别连接5g通讯模块、电机驱动电路和电源电路,5g通讯模块无线连接控制终端。
12.基于无人机机械振动的除冰装置的使用方法,包括:步骤一、将除冰装置安装在无人机门台上,并调整无人机摄像头摄像范围包括除冰装置头端;步骤二、控制无人机飞行至除冰目标位置,使破冰锥形头对准输电线覆冰段;步骤三、控制电动伸缩杆启动,电动伸缩杆向上收缩,拉杆与破冰触发杆同时向上移动,动力弹簧压缩至最大限度,此时回复力大于磁吸力,拉杆与破冰触发杆断开连接,同时动力弹簧复位回收力使破冰触发杆快速向外推出,破冰锥形头冲击力造成结冰碎裂;电动伸缩杆向下伸出,拉杆底端重新连接破冰触发杆顶端,重复上述动作,多次冲击,完成除冰。
13.相较现有技术,本发明的有益效果是:本发明结构简单,易于设置,不会对无人机飞行造成负担,实际操作性强。使用时,利用电动伸缩杆向上拉动拉杆与破冰触发杆,使得动力弹簧压缩至最大压缩位移,在动力弹簧回复力大于磁吸力时,拉杆与破冰触发杆瞬间断卡连接,同时动力弹簧复位赋予破冰触发杆向下的力,破冰触发杆快速向下弹出,使得破冰锥形头具有较大动能,瞬间向外击出,对冰块击穿,达到除冰效果。
14.基于无人机机械振动的除冰装置,实现输电线路带电运行状态的除冰作业,解决目前采用热力融冰法存在导线断线风险、影响导线性能的问题,相比人工除冰,无人机除冰装置有成本相对低、无人员伤亡风险、生存能力强、机动性能好、超视距飞行、使用方便高效等多种优势,可以推广应用于低压配电线的除冰工作。
附图说明
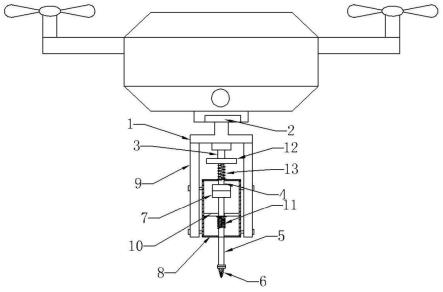
15.图1为本发明除冰装置向上收缩状态结构示意图;图2为本发明除冰装置破冰状态示意图;图中标记:1、安装架,2、控制箱,3、电动伸缩杆,4、拉杆,5、破冰触发杆,6、破冰锥形头,7、磁铁,8、装载壳,9、固定板,10、隔板,11、动力弹簧,12、连接板,13、复位弹簧。
具体实施方式
16.以下将结合说明书附图对本发明进一步解释说明,以便于本领域专业技术人员更好地理解。
17.实施例1如图1-2所示,基于无人机机械振动的除冰装置,包括无人机,所述无人机门台设有除冰装置,所述除冰装置包括安装架1、控制箱2、电动伸缩杆3、拉杆4、破冰触发杆5、破冰锥形头6、磁铁7、装载壳8、固定板9、隔板10、动力弹簧11、连接板12和复位弹簧13。
18.所述安装架1顶端与无人机门台可拆卸固定连接,所述控制箱2设置在安装架1上部并与电动伸缩杆3电连接,电动伸缩杆3设于安装架1底端且伸缩端向下与拉杆4顶端连接,所述拉杆4竖直向下且拉杆4底端连接破冰触发杆5顶端,具体地,所述拉杆4底端与破冰触发杆5顶端分别设有磁铁7,拉杆4与破冰触发杆5通过磁吸连接;破冰触发杆5底端连接破
冰锥形头6,通过破冰锥形头6撞击电缆达到除冰目的。
19.所述装载壳8套设于拉杆4下部和破冰触发杆5上部,装载壳8两侧分别设有固定板9,固定板9顶端与安装架1连接,装载壳8通过与固定板9连接保持稳定。装载壳8内设有隔板10,隔板10中央匹配破冰触发杆5开设孔洞,破冰触发杆5顶端通过孔洞贯穿隔板10与拉杆4底端连接;所述动力弹簧11套设于破冰触发杆5位于隔板10与装载壳8之间的外部,动力弹簧11顶端与隔板10表面接触,底端与破冰触发杆5固定连接。
20.常态时,动力弹簧11处于松弛状态,当电动伸缩杆3向上拉动拉杆4,破冰触发杆5随之向上移动,动力弹簧11压缩,直至动力弹簧11压缩至最短,动力弹簧11最大回复力大于拉杆4底端与破冰触发杆5顶端的磁吸力。此时,拉杆4与破冰触发杆5断开连接,破冰触发杆5向下移动,与拉杆4之间间隔预定距离。
21.所述拉杆4顶端设有连接板12,电动伸缩杆3伸缩端与连接板12采用螺栓连接,便于装卸和维护。拉杆4位于连接板12与装载壳8之间的外部套设复位弹簧13,复位弹簧13顶端与连接板12固定连接,底端与装载壳8固定连接,复位弹簧13随拉杆4向上移动而拉伸。
22.所述装载壳8与固定板9之间采用螺栓连接,装置故障时通过拆卸固定板9便于检修和更换零件。
23.所述破冰锥形头6与破冰触发杆5底端螺纹连接,便于更换破冰锥形头6,使破冰锥形头6头端保持尖锐,保证对结冰的击穿效果。
24.所述控制箱1包括arm处理器、arm处理器分别连接5g通讯模块、电机驱动电路和电源电路,5g通讯模块无线连接控制终端;arm处理器通过usb接口与无人机上的摄像头连接,arm处理器接收摄像头信息后,通过5g通讯模块无线传输到控制终端,地面操作人员根据接收的信息远程操控电动伸缩杆3和无人机动作。
25.实施例2基于无人机机械振动的除冰装置的使用方法,包括:步骤一、将除冰装置安装在无人机门台上,通过usb接口连接摄像头与控制箱1,并调整无人机摄像头摄像范围包括除冰装置头端;步骤二、控制无人机飞行至除冰目标位置,使破冰锥形头6对准输电线覆冰段;步骤三、控制电动伸缩杆3启动,电动伸缩杆3推动拉杆4向下,通过磁铁吸附破冰触发杆5,控制电动伸缩杆3向上收缩,拉杆4与破冰触发杆5同时向上移动,动力弹簧11压缩至最大限度,此时动力弹簧11回复力大于磁吸力,拉杆4与破冰触发杆5断开连接,同时动力弹簧11回复力使破冰触发杆5快速向外推出,破冰触发杆5向前回弹瞬间破冰锥形头6触碰导线使导线震动,改变冰的密度从而完成破冰工作;电动伸缩杆向下伸出,拉杆底端重新连接破冰触发杆顶端,重复上述动作,多次冲击,完成除冰。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1