一种抑制双馈风电机组过电压扰动的协同控制方法及系统
1.本发明属于风电系统控制领域,特别涉及一种抑制双馈风电机组过电压扰动的协同控制方法及系统。
背景技术:
2.在电力系统运行过程中,过电压现象常有发生,如长线路电容效应引起的工频过电压、突然甩负荷引起的电压升高、电容电感元件产生的谐振过电压等。由于双馈风电机组(doubly fed induction generator,dfig)的定子与电网直接耦合的特殊结构,导致双馈风电机组对过电压耐受能力较弱,持续的过电压冲击会导致转子中产生冲击电流,危害设备安全,甚至导致风机大规模脱网,对新能源电力系统的安全稳定运行产生较大影响。
3.现有技术中应对电力系统的过电压问题,主要从以下两方面展开:采用外部辅助装置和改进风机变流器控制策略。如在中国发明专利cn 202010391299.3中,提出一种基于暂态过电压抑制的双馈风电机组低压穿越控制方法及系统,利用测量装置获取风电机组机端电压值,通过比较实际电压值和给定值的大小,若比给定值大则切换变流器控制模式。此类方法需要依靠增加外部设备,但考虑到风电场内风机分布范围较广,单独调节某母线的电压对整体效果提升不大,增设额外设备成本高,维护复杂,并不适用于高比例、高渗透率风电的新能源系统。再比如在中国发明专利cn201710880776.0中,提出一种抑制逆变器输出端过电压的方法、装置及系统,通过检测到电网掉电时,控制逆变器输出端能量向逆变器输出端能量方向的相反方向转移,以降低逆变器的输出电压,但是切换控制策略并未考虑电压临界点波动的问题。
4.近年来协同控制理论逐渐被关注,由于其控制规律设计简单,控制器具备良好的动态和稳态特性,具备鲁棒性强的优点,被广泛应用在电力系统控制当中。但是现有应用协同控制理论的技术中,并未提出抑制过电压问题的有效方法。
5.因此如何能够减小过电压冲击对dfig的影响,保证dfig稳定运行的问题亟待解决。
技术实现要素:
6.本发明的目的是提供了一种抑制双馈风电机组过电压扰动的协同控制方法及系统,协同控制的步骤s1:以双馈风电机组网侧变流器控制直流电压恒定为控制目标,定义双馈风电机组网侧宏变量:
[0007][0008]
式中:k
i3
、k
s3
、k
i4
、k
s4
为pi系数,s为pi控制中的积分项,i
gd
、i
gq
为网侧变流器出口电流,i
gdref
为dfig网侧有功电流参考值,i
gqref
为dfig网侧无功电流参考值;
[0009]
其特征在于,还包括如下步骤:
[0010]
s2:使用测量装置获取风电机组的机端电压,以双馈风电机组转子侧变流器在过电压状态下为电网提供无功支撑为控制目标,定义双馈风电机组机侧宏变量为:
[0011][0012]
式中i
rd
、i
rq
为风机转子电流d、q轴分量,i
rdref
为dfig转子有功电流参考值,i
rqref
为dfig转子无功电流参考值,us为双馈风电机组机端电压,u
sref
为双馈风电机组机端电压参考值;
[0013]
s3:根据双馈风电机组dq坐标系下状态方程,结合构造双馈风电机组机侧宏变量演化动态方程的一阶微分表达式:
[0014][0015]
式中:t为系统自组织过程到达稳定状态快慢的参数,f(x,d,t)为状态变量x的一阶微分函数,x为状态变量,d为控制变量,t为时间;
[0016]
推导出双馈风电机组转子侧变流器控制律u
rd
、u
rq
:
[0017][0018]
式中:ψ1、ψ2为双馈风电机组机侧宏变量,t1、t2为推导所得协同控制参数,lm为励磁电抗,lr为转子电抗,ls为定子电抗,ωr为风机转子转速,ωs为同步角速度,ω
s1
为转差角速度,i
rd
、i
rq
为风机转子电流d、q轴分量,i
sd
、i
sq
为dfig定子电流dq轴分量,u
sd
、u
sq
为dfig定子电压dq轴分量,为dfig定子电压导数量;
[0019]
s4:根据双馈风电机组dq坐标状态方程,结合双馈风电机组网侧宏变量,推导双馈风电机组网侧变流器控制律u
gd
、u
gq
:
[0020][0021]
式中:ψ3、ψ4为双馈风电机组网侧宏变量,u
sd
、u
sq
为dfig定子电压dq轴分量,i
gd
、i
gq
为网侧变流器出口电流,rg、lg为网侧变流器出口阻抗值,ωs为同步角速度,t3、t4为推导所得协同控制参数,k
s3
、k
s4
为pi系数,i
gdref
为dfig网侧有功电流参考值,i
gqref
为dfig网侧无功;
[0022]
s5:构建协同控制器,应用双馈风电机组转子侧变流器控制律以及双馈风电机组网侧变流器控制律,代替经典双环控制的电流内环结构,保留经典双环控制的外环结构,构成双馈风电机组协同控制的整体结构;
[0023]
s6:使用协同控制器的参数选取方法选取协同控制器参数向量,实现抑制双馈风
电机组过电压扰动的协同控制。
[0024]
所述协同控制器的参数选取方法,包括如下步骤:
[0025]
s61:构建非线性方程描述双馈风电机组:
[0026][0027]
式中:x为状态变量,d为控制变量,t表示时间;
[0028]
s62:使用克拉索夫斯基法构造函数:
[0029][0030]
式中:f(x,d)为系统的n维非线性函数,f
t
(x,d)为f(x,d)的转置,f(x)为系统的雅可比矩阵,f
t
(x)为f(x)的转置,
[0031]
s63:针对由式(6)构建的非线性系统,使用李雅普诺夫直接法判断系统在某个运行点和控制参数下的稳定性,当有v(x)>0且时该系统是渐进稳定的;
[0032]
s64:使用蒙特卡洛法将协同控制器参数向量带入系统的状态方程式(6)中,再使用式(7)判断所述参数向量是否满足条件;
[0033]
所述协同控制器参数向量定义为:
[0034]
h=[k
i1
,k
i2
,k
i3
,k
i4
,k
iudc
,k
s1
,k
s2
,k
s3
,k
s4
,k
sudc t1,t2,t3,t4]
ꢀꢀꢀꢀꢀꢀ
(8)
[0035]
式中:
[0036]ki1
、k
s1
、k
i2
、k
s2
、k
i3
、k
s3
、k
i4
、k
s4
为pi系数,k
iudc
为直流电压控制比例参数,k
sudc
为直流电压控制积分参数,t1、t2、t3、t4为推导所得协同控制参数。
[0037]
所述协同控制器参数向量的取值为:
[0038]
h=[5,1,1,10,1,100,100,100,100,50,0.02,0.02,0.02,0.02]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)。
[0039]
一种应用本发明所述抑制双馈风电机组过电压扰动的协同控制方法的协同控制系统,其特征在于,包括:风机、dfig、rsc、gsc、协同控制器、电网,其中dfig包括定子端和转子端,风机与dfig的转子端相连;电网与dfig的定子端相连;rsc与dfig的转子端相连;gsc与电网相连;协同控制器包括rsc协同控制器和gsc协同控制器,rsc与rsc协同控制器相连,gsc与gsc协同控制器相连。
[0040]
本发明的有益效果在于:
[0041]
本发明所述一种抑制双馈风电机组过电压扰动的协同控制方法,能够减小过电压冲击对dfig的影响,通过将dfig机端电压引入流形,抑制dfig的机端过电压,能够在过电压故障时,降低dfig输出的无功电流,进行动态无功补偿,达到抑制过电压的效果,保证dfig稳定运行。基于协同控制理论,将转子侧变流器电流与机端电压引入宏变量中,设计dfig转子/网侧变流器控制律,具备良好的动态和稳态特性,具备较强的鲁棒性。接入电网后,与经典pi控制相比,在抑制过电压峰值及峰值持续时间和减小电气量超调量方面具有显著优势,对高维非线性的风电系统有良好控制效果,具有较强实用性。
附图说明
[0042]
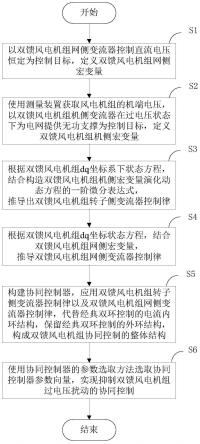
图1为一种抑制双馈风电机组过电压扰动的协同控制方法流程图;
[0043]
图2为应用一种抑制双馈风电机组过电压扰动的协同控制方法的系统结构图;
[0044]
图3为dfig协同控制以及定子电压矢量定向控制模型拓扑结构图;
[0045]
图4为rsc协同控制器结构示意图;
[0046]
图5为gsc协同控制器结构示意图;
[0047]
图6a-6c为l1损失30%仿真结果对比图;
[0048]
图7a-7c为l1损失50%仿真结果对比图;
[0049]
图8a-8c为l1损失70%仿真结果对比图;
[0050]
图9a-9c为l2损失30%仿真结果对比图;
[0051]
图10a-10c为l2损失50%仿真结果对比图;
[0052]
图11a-11c为l2损失70%仿真结果对比图。
具体实施方式
[0053]
本发明提出一种抑制双馈风电机组过电压扰动的协同控制方法,以下结合附图对本发明作进一步的详细说明。
[0054]
本发明公开一种抑制双馈风电机组过电压扰动的协同控制方法,通过选取宏变量得到流形的定义,并推导出能够实现控制目标的控制律。
[0055]
宏变量为由系统状态变量构成的函数,根据系统的控制目标进行选取,形如ψ(x,t);根据宏变量得到所述流形为:ψ(x,t)=0;协同控制的目标是让状态变量收敛至流形面上,再由流形面趋于平衡点,定义流形相当于在原来的系统上增加一个约束条件,使原系统降阶,其动态过程用下式来描述:
[0056][0057]
式中:ψ为宏变量,t为表示时间的协同控制参数,当t》0时,表示状态变量转移到流形面上的时间常数。
[0058]
基于上述协同控制理论,发明公开的一种抑制双馈风电机组过电压扰动的协同控制方法的流程如图1所示,具体实现步骤如下:
[0059]
s1:以双馈风电机组网侧变流器控制直流电压恒定为控制目标,定义双馈风电机组网侧宏变量:
[0060][0061]
式中:k
i3
、k
s3
、k
i4
、k
s4
为pi系数,s为pi控制中的积分项,i
gd
、i
gq
为网侧变流器出口电流,i
gdref
为dfig网侧有功电流参考值,i
gqref
为dfig网侧无功电流参考值;
[0062]
以控制直流电压恒定为控制目标,选取双馈风电机组网侧宏变量ψ3和ψ4来维持流入变流器的电流i
gd
和i
gq
,网侧变流器出口电流由下式表示:
[0063]
[0064]
式中:rg为网侧变流器出口电阻,lg为电抗u
sd
、u
sq
、u
rd
、u
rq
为定子、转子电压,ωs为同步角速度。
[0065]
s2:使用测量装置获取风电机组的机端电压,以双馈风电机组转子侧变流器在过电压状态下为电网提供无功支撑为控制目标,定义双馈风电机组机侧宏变量为:
[0066][0067]
式中i
rd
、i
rq
为风机转子电流d、q轴分量,i
rdref
为dfig转子有功电流参考值,i
rqref
为dfig转子无功电流参考值,us为双馈风电机组机端电压,u
sref
为双馈风电机组机端电压参考值;
[0068]
所述双馈风电机组机侧宏变量,以dfig在过电压时需要向电网提供无功支撑为控制目标,考虑到在电网电压d轴定向控制下,i
rq
为输出的无功电流,完成双馈风电机组机侧宏变量的选取。
[0069]
s3:根据双馈风电机组dq坐标系下状态方程,并结合构造宏变量演化动态方程的一阶微分表达式:
[0070][0071]
式中:t为系统自组织过程到达稳定状态快慢的参数,f(x,d,t)为状态变量x的一阶微分函数,x为状态变量,d为控制变量,t为时间;
[0072]
推导出双馈风电机组转子侧变流器控制律u
rd
、u
rq
:
[0073][0074]
式中:ψ1、ψ2为双馈风电机组机侧宏变量,t1、t2为推导所得协同控制参数,lm为励磁电抗,lr为转子电抗,ls为定子电抗,ωr为风机转子转速,ωs为同步角速度,ω
s1
为转差角速度,i
rd
、i
rq
为风机转子电流d、q轴分量,i
sd
、i
sq
为dfig定子电流dq轴分量,u
sd
、u
sq
为dfig定子电压dq轴分量,为dfig定子电压导数量;
[0075]
推导双馈风电机组机侧控制变量,即推导出双馈风电机组转子侧变流器控制律,能够实现为电网提供无功支撑的控制目标,具体推导过程如下:
[0076]
s31:在dq坐标系下,构建dfig的数学模型,建立dfig的磁链及电压方程为:
[0077]
[0078][0079]
式中:u
sd
、u
sq
、u
rd
、u
rq
为定子、转子电压,ψ
sd
、ψ
sq
、ψ
rd
、ψ
rq
为定子、转子磁链分量,i
sd
、i
sq
、i
rd
、i
rq
为定子、转子电流分量,lm为励磁电抗,l
ls
、l
lr
为归算到定子侧后的漏抗,ls=lm+l
ls
,lr=lm+l
lr
,p为微分算子,rs、rr为定转子绕组电阻,ωs为同步角速度,ωr为转子角速度。
[0080]
s32:将上述磁链方程代入电压方程:
[0081][0082]
式中:变量定义同式(11)和式(12)。
[0083]
s33:联立解出以定转子电流为状态变量的状态方程:
[0084][0085]
式中:ωs为同步角速度,其他变量定义同式(11)和式(12)。
[0086]
s34:根据式(2)所定义的双馈风电机组机侧宏变量,以及式(6)所构建的描述双馈风电机组的非线性方程,定义流形为:ψ(x,t)=0,联立协同控制方程为:
[0087][0088]
式中:ψ为宏变量,t为表示时间的协同控制参数,x为状态变量,d为控制变量,t为时间。
[0089]
s35:将ψ1带入式(15)所述协同控制方程:
[0090][0091]
s36:将i
rd
的导数带入有:
[0092]-t1((i
rq
l
m2
ω-l
surd-i
rq
lrlsω+i
sq
lmlsωr+i
rq
lrlsωr)/(l
m2-lrls))+ψ1=0
ꢀꢀꢀ
(17)
[0093]
s37:将定子转子电阻忽略为0,解出u
rd
的控制律如式(4)所示。
[0094]
s38:同理,将ψ2带入式(15)所述协同控制方程,将
irq
的导数带入,解出u
rq
的控制律如式(4)所示。
[0095]
至此完成双馈风电机组机侧控制变量u
rd
、u
rq
的推导,形成双馈风电机组转子侧变流器控制律,应用于dfig转子侧变流器(rotor side converter,rsc)的协同控制器,实现为电网提供无功支撑的控制目标,并实现维持dfig定子输出的有功无功,得益于协同控制理论的控制规律设计简单的特点,本实施例所述rsc具备良好的动态和稳态特性以及鲁棒性。
[0096]
s4:根据双馈风电机组dq坐标状态方程,结合双馈风电机组网侧宏变量,推导双馈风电机组网侧变流器控制律u
gd
、u
gq
:
[0097][0098]
式中:ψ3、ψ4为双馈风电机组网侧宏变量,u
sd
、u
sq
为dfig定子电压dq轴分量,i
gd
、i
gq
为网侧变流器出口电流,rg、lg为网侧变流器出口阻抗值,ωs为同步角速度,t3、t4为推导所得协同控制参数,k
s3
、k
s4
为pi系数,
igdref
为dfig网侧有功电流参考值,
igqref
为dfig网侧无功;
[0099]
推导双馈风电机组网侧控制变量,即推导出双馈风电机组网侧变流器控制律,能够实现控制直流电压恒定的控制目标,具体推导过程与上述双馈风电机组机侧控制变量的推导过程类似,相同部分不再赘述。通过完成双馈风电机组网侧控制变量u
gd
、u
gq
的推导,形成双馈风电机组网侧变流器控制律,应用于dfig网侧变流器(grid side converter,gsc)的协同控制器,实现控制直流电压恒定的控制目标,维持直流电压稳定和调制功率因数,在机端过电压的冲击下维持直流环节电压的稳定对dfig稳定运行具有重要意义。
[0100]
s5:构建协同控制器,应用双馈风电机组转子侧变流器控制律以及双馈风电机组网侧变流器控制律,代替经典双环控制的电流内环结构,保留经典双环控制的外环结构,构成双馈风电机组协同控制的整体结构;
[0101]
所述经典双环控制的外环结构为:
[0102][0103]
式中:
[0104]irdref
为dfig转子有功电流参考值,i
rqref
为dfig转子无功电流参考值,i
gdref
为dfig网侧有功电流参考值,k
i1
、k
s1
、k
i2
、k
s2
为pi系数,k
iudc
为直流电压控制比例参数,k
sudc
为直流电压控制积分参数,s为pi控制中的积分项,p
ref
,为dfig输出有功功率参考值,p为dfig实际输出有功,q
ref
为dfig输出无功功率参考值,q为dfig实际输出无功,u
dcref
为dfig直流环节电压参考值,u
dc
为dfig直流环节实际电压;
[0105]
在经典pi控制中rsc通过内外环结构控制dfig转子电流i
rd
、i
rq
进而控制输出有功、无功功率,其效能直接影响dfig输出波形质量,本实施例使用协同控制器代替其内环pi环节,所述协同控制器包括rsc协同控制器和gsc协同控制器,所述rsc协同控制器的结构如图4所示,所述gsc协同控制器的结构如图5所示,控制规律设计简单,对高维非线性的风电系统有良好控制效果,具有较高的实用性。
[0106]
s6:使用协同控制器的参数选取方法选取协同控制器参数向量,实现抑制双馈风电机组过电压扰动的协同控制,具体选取步骤如下:
[0107]
s61:构建非线性方程描述双馈风电机组:
[0108][0109]
式中:x为状态变量,d为控制变量,t表示时间。考虑到dfig是典型非线性系统,其控制参数对系统稳定性至关重要,不仅要保持系统的稳定运行,在受扰后还应使系统尽快恢复到稳态。对于高维非线性控制参数,根据工程经验得知其选取十分困难。
[0110]
s62:使用克拉索夫斯基法构造函数:
[0111][0112]
式中:f(x,d)为系统的n维非线性函数,f
t
(x,d)为f(x,d)的转置,f(x)为系统的雅可比矩阵,f
t
(x)为f(x)的转置,
[0113]
s63:针对由式(6)构建的非线性系统,使用李雅普诺夫直接法判断系统在某个运行点和控制参数下的稳定性,当有v(x)>0且时该系统是渐进稳定的;
[0114]
通过李雅普诺夫直接法,使用式(15)判断,由式(6)构建的描述双馈风电机组的非线性系统在某个运行点和控制参数下的稳定性。
[0115]
s64:使用蒙特卡洛法将协同控制器参数向量带入系统的状态方程式(6)中,再使用式(7)判断所述参数向量是否满足条件;
[0116]
所述协同控制器参数向量定义为:
[0117]
h=[k
i1
,k
i2
,k
i3,ki4,kiudc
,k
s1
,k
s2
,k
s3,ks4,ksudc t1,t2,t3,t4]
ꢀꢀꢀꢀꢀꢀ
(8)。
[0118]
式中:
[0119]ki1
、k
s1
、k
i2
、k
s2
、k
i3
、k
s3
、k
i4
、k
s4
为pi系数,k
iudc
为直流电压控制比例参数,k
sudc
为直流电压控制积分参数,t1、t2、t3、t4为推导所得协同控制参数。
[0120]
本实施例选取状态变量为:id、iq、if、id、iq、uf、i
sq
、i
sd
、i
rd
、i
rq
、u
rd
、u
rq
、u
gd
、u
gq
、i
gd
、i
gq
、u
dc
、i
gdref
。考虑到本实施例所述系统状态变量较多,难以通过常规的解析计算方法求得系统控制参数,本实施例使用蒙特卡洛法取点,再通过反向带入式(7)验证来选取控制参数,最终得出一组合适协同控制器参数向量如下:
[0121]
h=[5,1,1,10,1,100,100,100,100,50,0.02,0.02,0.02,0.02]
ꢀꢀꢀ
(9)
[0122]
在经典pi控制中一般通过调节pi参数实现控制被控量到达稳态的速度,p参数取值过小会导致收敛速度慢,取值过大会导致超调量大。本发明通过表示时间的协同控制参数t进行调节,t参数取值越小说明被控量到达稳态越快,且不存在超调量的问题。
[0123]
至此完成本实施例所述一种抑制双馈风电机组过电压扰动的协同控制方法的完
整流程,本实施例所述协同控制方法,应用协同控制理论,抑制dfig的机端过电压,通过将dfig机端电压引入流形,在过电压故障时降低dfig输出的无功电流、动态调无功,达到抑制过电压的效果。得益于协同控制理论具有控制规律设计简单的优点,通过定义宏变量并求解控制变量的方式,减小过电压对dfig的冲击,确保dfig稳定运行。
[0124]
根据以上提出双馈风电机组转子侧变流器控制律、双馈风电机组网侧变流器控制律以及选取的协同控制器参数向量,通过电磁暂态仿真软件(power systems computer aided design,pscad)进行时域仿真,验证所提出控制律及协同控制器参数向量的有效性,具体验证过程如下:
[0125]
以某地区双馈风电场接入电网为例,如图3所示,在pscad中搭建dfig协同控制以及定子电压矢量定向控制模型,验证在甩负荷后母线过电压情况下的控制效果。
[0126]
双馈风电场接入母线b1,采用单机等值模型。同时设g2容量无限大,母线b4电压恒定。负荷采用恒定阻抗模型,以风电场容量为基准归算到标幺值l1=0.35+j0.08pu,l2=1.5+j0.53pu其余仿真参数如下:
[0127]
双馈风电场参数:风机台数75台;额定功率1mw;额定定子电压690v,定子漏抗0.16pu;转子漏抗0.18pu;激磁电抗2.9pu;定子电阻0.02pu;转子电阻0.03pu;功率基值1mw;电压基值1000v;直流环节电压1050v。转速基准值314.159rad/s
[0128]
同步电机参数:容量90mw;功率因数0.9;电枢电阻0.0025pu;励磁绕组电阻0.00043pu;d轴阻尼绕组电阻0.0051pu;q轴阻尼绕组电阻0.000842pu;直轴电抗1.66pu;交轴电抗1.52pu;定子漏抗0.14pu;励磁绕组电抗1.7204pu;d轴阻尼绕组电抗1.5637pu;q轴阻尼绕组电抗0.876pu;avr励磁系统ka=80;ta=0.02;
[0129]
线路参数:x1=x2=x3=0.08+j0.2pudfig经典pi控制参数:rsc侧内环参数:ki=1;ks=100;网侧内环参数:ki=1;ks=100;
[0130]
如图6-图11所示,算法1为经典pi控制方法,算法2为本发明所述一种抑制双馈风电机组过电压扰动的协同控制方法,通过两个场景对比两种算法在不同情况下的控制效果,对比结果如下:
[0131]
场景1:风电场出口侧负荷l1,在t=10s时由于断路器跳闸造成负荷损失,导致系统过电压,在t=10.5s后重合闸成功。
[0132]
图6a、图6b为母线b1、b2电压曲线,图6c为dfig直流环节电压曲线,如图6a-6c所示,协同控制在l1负荷骤降30%的情况下,控制效果明显好于经典pi控制。
[0133]
如图6a所示,母线b1电压在协同控制下能够将冲击电压峰值抑制在1.08pu以下,而pi控制下母线b1冲击电压超过1.09pu,电压峰值较高持续时间较长。
[0134]
如图6b所示,在协同控制下传统电源与双馈风电场公共母线b2电压冲击更小,过渡过程更加平稳,暂态持续时间缩短且有效抑制电压波动。
[0135]
如图6c所示,dfig直流环节电压在协同控制下超调量小,并且较快到达稳态,相比于pi控制冲击电压超过1.06pu,协同控制对直流环节电压稳定有较大提升。
[0136]
图7a-7c为l1骤降50%后,系统各节点电压仿真结果,如图7a-7c所示,协同控制在负荷损失50%情况下,控制效果仍好于pi控制。
[0137]
如图7a所示,在母线b1负荷损失50%的情况下,风电场母线电压在pi控制下的冲击电压峰值达1.15pu。而协同控制下将冲击电压峰值抑制在1.1pu,减小了冲击电压对dfig
定转子产生的不利影响。
[0138]
如图7b所示,母线b2电压在协同控制下超调量减小,过渡过程缩短。
[0139]
如图7c所示,dfig直流环节电压在协同控制下过渡过程平稳,冲击值减小。
[0140]
图8a-8c为l1损失70%情况下,系统各母线电压。如图8a所示,在pi控制下dfig机端母线电压冲击值达1.2pu,电压峰值持续时间较长,对风机产生不利影响。在协同控制下过电压峰值仍被抑制在1.15pu以下,且过渡过程平稳,电压波动减小。
[0141]
如图8b所示,在l1负荷损失较大时,协同控制策略对母线b2电压仍有抑制作用,且能够缩短暂态过渡过程。
[0142]
如图8c所示,在l1损失较大后,dfig直流环节电压也产生较大冲击,在协同控制下能够较大程度抑制冲击电压并加速暂态过渡过程。
[0143]
在本实施例所述场景1中,当母线b1负荷发生不同程度损失时,协同控制均能够使dfig机端冲击电压被抑制,同时加速暂态过渡过程减小电压波动。同时对于母线b2电压及dfig直流环节电压也有较好的抑制作用。
[0144]
场景2:双馈风电场和传统电源公共母线b2侧负荷l2,在t=10s时由于断路器跳闸负荷损失,导致系统过电压。在t=10.5s时线路重合闸成功,具体仿真结果如下:
[0145]
如图9a-9c所示,当负荷l2骤降30%时,dfig协同控制对抑制系统过电压有良好效果。
[0146]
如图9a所示,在l2甩负荷后,在pi控制下b1母线冲击电压峰值达1.12pu,在协同控制下冲击电压峰值被抑制在1.1pu以下,并能使电压波动减小,快速到达稳态。
[0147]
如图9b所示,母线b2电压冲击值在协同控制下被抑制,有效降低冲击电压峰值。
[0148]
如图9c所示,dfig直流环节电压在协同控制下,振荡次数减少,电压峰值降低。
[0149]
图10a-10c为公共母线负荷损失50%时,系统各节点电压曲线。
[0150]
如图10a所示,由于公共点负荷较重,在损失50%后,母线b1冲击电压在pi控制下超过1.16pu,而在协同控制下,冲击电压峰值被抑制在1.12pu附近。
[0151]
如图10b所示,对于母线b2电压在协同控制下仍有良好控制效果,加速了暂态过渡过程,减小超调量。
[0152]
如图10c所示,dfig直流环节电压在协同控制下很大程度减小波动快速到达稳态值。
[0153]
图11a-11c为l2损失70%后,系统各母线电压。如图11a所示,在pi控制下当负荷损失70%时,dfig机端母线冲击电压已超过1.2pu,对风机正常运行产生不利影响。协同控制下过电压峰值未超出1.15pu,且过渡过程平稳,振荡次数减小。
[0154]
在本实施例所述在场景2中,dfig协同控制策略对于在公共点重负荷骤降情况下,抑制系统过电压有良好效果,相比于传统pi控制,协同控制无论在过渡过程时间和超调量方面都有优势。对系统安全稳定运行和风电场的电压稳定性有较大帮助。
[0155]
本发明的第二个实施例,如图2所示,公开一种应用本发明所述抑制双馈风电机组过电压扰动的协同控制方法的协同控制系统,包括:风机100、dfig200、rsc300、gsc400、协同控制器500、电网600,其中dfig包括定子端210和转子端220;风机100与dfig200的转子端220相连;电网600与dfig200的定子端210相连;rsc300与dfig200的转子端220相连;gsc400与电网600相连;协同控制器500包括rsc协同控制器510和gsc协同控制器520,rsc300与rsc
协同控制器510相连,gsc400与gsc协同控制器520相连。
[0156]
在本实施例中,dfig200的转子端220的电压dq轴分量为u
rd
、u
rq
;dfig200的定子端210的电压dq轴分量为u
sd
、u
sq
,因dfig200的定子端210与电网600直连,近似认为电网600处电压仍为u
sd
、u
sq
;gsc400的出口电压为u
gd
、u
gq
,gsc协同控制器520与gsc400相连,实现双馈风电机组网侧变流器控制律,维持dfig200直流环节电压u
dc
以及功率因数的恒定;rsc协同控制器510与rsc300相连,实现双馈风电机组转子侧变流器控制律,维持dfig200的定子端210输出的有功无功功率。
[0157]
应用本发明所公开的抑制双馈风电机组过电压扰动的协同控制方法,使用双馈风电机组转子侧变流器控制律和双馈风电机组网侧变流器控制律代替经典双环控制的电流内环结构,构成双馈风电机组协同控制的整体结构,并使用协同控制器的参数选取方法选取协同控制器参数向量,能够减小过电压冲击对dfig的影响,通过将dfig机端电压引入流形,抑制dfig的机端过电压,能够在过电压故障时,降低dfig输出的无功电流,进行动态无功补偿,达到抑制过电压的效果,保证dfig稳定运行,在抑制过电压峰值及峰值持续时间和减小电气量超调量方面具有显著优势,对高维非线性的风电系统有良好控制效果,具有较强实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1