一种立体仓库自动化设备的势能回收系统及其搭建方法与流程
1.本发明涉及能量回收技术领域,尤其涉及一种立体仓库自动化设备的势能回收系统及其搭建方法。
背景技术:
2.近年来,“节能降耗”成为我国自动化技术发展中备受关注的词汇之一,提高能源利用效率是满足国民经济发展能源需求和应对环境问题的有效途径。据测算,我国每创造1美元gdp 所消耗的能源是美国的4.3倍,是日本的11.5倍,我国的能源利用率仅为美国的26.9%、日本的11.5%。由此可见,在我国企业的产品成本中,能源消耗的成本比较大,同时也说明,我国企业节能的空间十分巨大,完全可以通过节能降耗来增加产品的竞争力。
3.随着我国自动化仓储技术日趋成熟,行业应用的广度与深度不断提高,自动化仓储市场规模在不断的扩大,“检储配”一体化基地将会有越来越多的自动化立体仓库投入建设并使用。在使用过程中需要堆垛机频繁地完成货物的拣选、装卸等作业,货叉经常举着货物下降,在下降过程中负载重力势能都消耗在控制阀上,不仅浪费了能量,而且造成设备寿命降低等问题。传统的工程机械基本上是基于发动机功率匹配节能技术以降低燃油消耗,但发动机的功率匹配是以额定负载为基准进行的,在小负载下的匹配性很差,因此存在一定的局限性。
4.目前国内在中小容量系统中大都采用能耗制动方式,即通过内置或外加制动电阻的方法将电能消耗在大功率电阻器中,实现电机的四象限运行,该方法虽然简单,但有如下严重缺点:
5.(1)浪费能量,降低了系统的效率。
6.(2)电阻发热严重,影响系统的其他部分正常工作。
7.(3)简单的能耗制动有时不能及时抑制快速制动产生的泵升电压,限制了制动性能的提高
8.上述缺点决定了能耗制动方式只能用于几十kw以下的中小容量系统。国内关于能量回馈控制的研究正在进行,但基本上都处于实验阶段,但尚未发现该方面成熟产品。
技术实现要素:
9.本发明的目的在于克服现有技术的不足之处,提供一种立体仓库自动化设备的势能回收系统及其搭建方法,加入直流共母线技术,实现多变频装置公用直流端,实现变频间能量互补,保证设备及电力系统安全。
10.本发明的目的是通过以下技术方案实现的:
11.一种立体仓库自动化设备的势能回收系统,其特征在于:势能回收系统包括直流母线、势能回收单元、变频模块及伺服系统;变频模块设有多个,该变频模块的变频控制端由势能回收单元供电并与势能回收单元一同并联连接在直流母线上,变频模块的电力输入端分别并联连接380v电源,变频模块的电力输出端分别连接伺服系统;伺服系统用电时由
380v电源经变频模块供电,伺服系统发电时由变频模块为势能回收单元充电。
12.优选的,包括阈值控制方法及制动能量计算方法。
13.优选的,阈值控制方法包括以下步骤:
14.步骤1,将实测的直流母线电压与给定值之差,通过pi调节器,得到d轴电流的给定值;
15.步骤2,根据测量到的电网电压的相位,对实测的网侧变流器输出电流进行同步坐标变换,得到d轴电流和q轴电流的实测值,
16.步骤3,对步骤2中得出的实测值进行pi调节后将d轴量与电网电压幅值相加,得到d 轴电压和q轴电压的给定值,经过同步坐标反变换后输出。
17.优选的,制动能量计算方法包括以下步骤:
18.步骤1,计算制动转矩:t=((j+j负)*(v1-v2))/375*t1-t负;式中:j:电机转动惯量;j负: 电机负载测折算到电机测的转动惯量;v1:制动前速度;v2:制动后速度;t1:减速时间;t负: 负载转矩;
19.步骤2,计算制动功率:p=.2π*t*n/60/1000;式中:t:制动转矩;n:额定转速。
20.本发明的优点和技术效果是:
21.本发明的一种立体仓库自动化设备的势能回收系统及其搭建方法,加入直流共母线技术,实现多变频装置公用直流端,实现变频间能量互补,并采用独特的一种电源多驱动的方式,多变频装置公用同一个电源模块,减少了输入端滤波器和电抗器,同时消除多变频的串扰;配合势能回收软件系统,智能协调多个轴的动作,一制动一启动,优化加减速时间,同时配合调度系统进行电网峰值管理;通过监控调节内部直流母线电压,结合超级电容技术制成的能量回馈单元,智能开启并快速吸收直流母线过高的电压,保证设备及电力系统安全。
22.本发明实际为解决立体仓库自动化装备的痛点:高耗电大大的增加了企业的运营成本,一个大型化的立库系统一年的耗电费用将达到几十万甚至百万级别,同时本发明也可助力推动产业“节能减排”理念的深化发展。
23.现阶段的立库系统已经发展到高速大型化,高速重载极大的提高作业效率,同时在制动过程中产生巨大能量,能量回收利用意义重大。
24.立体库以堆垛机样品为例,行走功率11kw,升功率降38kw,货叉功率4kw为例;单台使用一天耗电量达到220kwh,采用势能回收后为154kwh,一天可节省电量66kwh。
25.以天津检储配基地立体仓库为例,共有9台堆垛机,一天节省电费:
26.66*9*1.025*0.8=487(元)一年节省费用17万左右。
27.以天津地区为例,按照发改委标准,天津地区外购电力碳排因子8.733tco2/万kwh,根据加装势能回收装置后节省的电量计算二氧化碳减排量为:66*365*8.733/10000=21吨
28.势能回收装置的使用,显而易见的减少了能源的消耗,这代表着减少了二氧化碳的排放,减少了环境的负担,让企业承担起对社会和环境保护的责任。
附图说明
29.图1为本发明的硬件网络拓扑图;
30.图2为本发明的控制电路详情示意图;
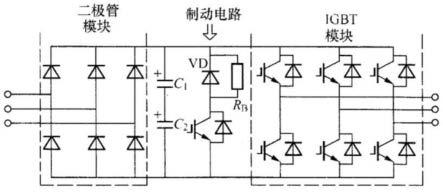
31.图3为本发明的变频器内部基本电路图;
32.图4为本发明的控制电路实体设备示意图;
33.图5为本发明的起重系统过程母线电压变化情况曲线图。
具体实施方式
34.为能进一步了解本发明的内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下。需要说明的是,本实施例是描述性的,不是限定性的,不能由此限定本发明的保护范围。
35.本发明创新提出了一种立体仓库自动化装备的势能回收装置,所要解决的问题是在堆垛机的电网与水平驱动变频器和起升驱动变频器之间设置一种能量转换模块,将制动过程产生的能量进行回收,存储至设备内部储能装置,满足设备内部使用,并具备将能量通过有源逆变的方式回馈至电网的条件。其特征在于:加入直流共母线技术,实现多变频装置公用直流端,实现变频间能量互补;采用独特的一种电源多驱动的方式,多变频装置公用同一个电源模块,减少了输入端滤波器和电抗器,同时消除多变频的串扰;配合势能回收软件系统,智能协调多个轴的动作,一制动一启动,优化加减速时间,同时配合调度系统进行电网峰值管理;通过监控调节内部直流母线电压,结合超级电容技术制成的能量回馈单元,智能开启并快速吸收直流母线过高的电压,保证设备安全。
36.为了解决上述技术问题,本发明采用了如下技术方案:
37.本发明的一种立体仓库自动化装备的势能回收装置通过对变频调速系统进行分析,得到能量来源,通过直流共母线、阈值控制、有源逆变等技术方法,配置硬件平台,设计开发软件控制系统与调度系统相互配合,输出势能回收装置。
38.其中,势能回收装置主要基于的技术包括能量来源、直流共母线技术、阈值控制技术和有源逆变技术。
39.(1)本发明的能量来源基于堆垛机行走机构、agv智能搬运机器人行走机构等需要快速制动类负载时,电机都不可避免地存在发电过程,即电机转子在外力的拖动或负载自身转动惯量的维持下,使得电机的实际转速大于变频器输出的同步转速,电机所发出的电能将会储存在变频器的直流母线滤波电容中,如果不把这部分能量消耗掉,那么直流母线电压就会迅速升高,影响变频器的正常工作。电动机的降速和停车是通过逐渐减小频率来实现的,在频率减小的瞬间,电动机的同步转速随之下降,而由于机械惯性的原因,电动机的转子转速未变,它的转速变化是有一定时间滞后的,这时会出现实际转速大于给定转速,从而产生电动机反电动势e高于变频器直流端电压u的情况,即e》u。此时电动机就变成发电机,无需电网供电,并且可向电网送电。
40.(2)本发明的直流共母线技术基于通用变频装置均采用交-直-交变频方式,当电机处于制动状态时,其制动能量反馈到直流侧,为了更好的处理反馈制动能量,各变频装置的直流侧连接起来。在立库系统中可以通过控制算法当行走开始制动时,启动升降运行可以做到能量的互补,升降直接从直流母线中获取行走制动产生的能量。因此采取一个主变频控制单元、一个主电源模块加多个驱动模块组成。其中电源模块给多个驱动提供直流母线电压。
41.(3)本发明的阈值控制技术是1、将实测的直流母线电压与给定值之差,通过pi调节器,得到d轴电流的给定值;2、然后根据测量到的电网电压的相位,对实测的网侧变流器输出电流进行同步坐标变换,得到d轴电流和q轴电流的实测值,3、对其进行pi调节后将d轴量与电网电压幅值相加,得到d轴电压和q轴电压的给定值,经过同步坐标反变换后输出。
42.(4)本发明的有源逆变技术是当变换装置交流侧接在电网上,把直流电逆变成同频率的交流电回馈到电网上去,通过有源逆变的原理实现能量回馈,及回馈装置在有源逆变过程对直流母线电源会不会产生影响、有无波形干扰等问题出现。
43.本发明的一种立体仓库自动化装备的势能回收装置对其势能回收装置进行设计,通过分析其能量来源,对势能回收装置的实现要求进一步明确,从而进一步提出势能回收装置的硬件配置方案。
44.本发明的势能回收装置的硬件配置主要通过e-plan软件进行电路设计;microsoftvisualstudio进行程序设计,再由multisim进行电路设计,配置合理方案来搭建软硬件装置。
45.其中,势能回收装置整体配置主要由势能回收单元、变频电源模块以及伺服系统等主要组件组成。
46.(1)本发明的势能回收装置为了达到节能的目的就可以将这部分电能通过控制设备,储存在超级电容或电池包中,当设备进入负重运行时,再通过控制设备把储存在储能设备中的电能,回送给变频器直流母线。由于回送的电能是直接给变频器直流母线.并由设备自身使用的,所以对电网没有任何干扰,达到绿色、环保、节能的目的。
47.(2)本发明的势能回收装置要求包括:基于三个pm240-2功率模块开发,不改变变频器原有电路及正常工作时允许电压;实现三个电机制动时能量回收和利用,不回馈电网,不使用制动电阻消耗;要求制动时产生的能量90%以上可回收,存储起来的电能也需要能释放回直流母线供电机使用,设备断电不启用需保证势能回收装置不向直流母线供电;具备可视化数据,可通过通讯协议发送数据到服务器;势能回收装置传输数据:剩余电量,当前充电/放电状态;当前直流母线电压;当前充电电流;当前充电电压;当前放电电流;当前放电电压;当前故障代码;当前设备温度;设定时间势能回收量;设定时间势能释放量。上位机传输:设定时间t;具备过充、过放、过流、温度、短路保护功能。
48.(3)本发明的势能回收装置技术路线为双向dc/dc转换模块,采用buck-boost+llc拓扑。48v磷酸铁锂电池为标准电池模块:
49.本发明的emi主要为:单独的输入输出emi板设计;pv输入端口emi电容板设计;结构件增加屏蔽中隔板把emi板至于相对干净的腔体中;机箱预留屏蔽措施。
50.本发明的势能回收装置结构及使用为设计工作环境温度-25~60度,45度以上需降额使用,工作环境湿度《100%,环境要通风,工作海拔《4000m(海拔》2000m根据减额标准对负载减额使用)。pcba单板模块化设计;通讯接口主要采用rj45。
51.表格1电气规格参数表
[0052][0053][0054]
(3)本发明的硬件系统设计的主要包括:内部结构、interface板、中隔板、psdr板、变压器仓、关键器件列表
[0055]
内部主要功能板可定义为控制板、interface与psdr板,也是分上下层结构;变压器仓与电感仓分开。其中interface板包含逆变输出采样滤波线路以及输出relay、pv输入emi滤波和辅助电源(单独电池需按冷启动按钮),中隔板下嵌风扇使下层psdr板参与内循环,psdr板主要由全桥双向dcdc、两路boost、正负bus平衡桥以及t型两相逆变组成;变压器仓采用pcb进行连线,减少线材方便作业,硬件设计中关键元器件列表如下表所示:
[0056]
表格2关键器件表
[0057]
[0058][0059]
本发明的一种立体仓库自动化装备的势能回收装置对其势能回收装置的软件控制进行设计,设计内容如下本发明的:
[0060]
(1)本发明的势能回收系统软件可以和调度系统相互配合,在保证出入库效率的同时,优化电网峰值功率势能回收系统下的每一台单一设备都进行电源管理。
[0061]
(2)本发明的势能回收软件控制如堆垛机提升轴与行走轴的智能协调控制当行走轴减速制动时,提升轴开始运行,将制动回馈的能量,消耗在提升过程中加速过程中减速了负载率。既减少了峰值功率也没有增加定位时间。
[0062]
(3)本发明的势能回收系统软件控制技术可以节省高达7%的能量消耗无硬件成本增加。
[0063]
一种立体仓库自动化装备的势能回收装置,如图1所示,是在堆垛机的电网与水平驱动变频器和起升驱动变频器之间设置一种能量转换模块(势能回收单元),该能量转换模块通过两组输出端子分别与水平驱动变频器和起升驱动变频器连接;堆垛机水平电动机制动和起升电动机下降时产生的能量通过能量转换装置转换成电能后互相回馈,多余电能回馈至电网或自身存储,实现电能再利用。控制电路详情和变频器内部电路如图2、图3所示。
[0064]
实施例1:
[0065]
见图4、图5,本实施例的一种势能回收装置,在现有立体仓库环境下,通过仿真测算,以稳定运行为前提,确定能量反馈最大化的运行方式;运行方式确认后,计算出产生能量的具体值,在此基础上选型以达到能量最优回馈硬件搭配;进行试验数据采集,测算不同环境下能量回馈效率,评估产生的经济和环境效益。
[0066]
本发明对仓储自动化设备电机进行升级改造,并给出落地具体方案,实现自动化立体仓库设备能量回收以及再利用。通过本创新发明的势能回收装置,由单次制动功率计算:
[0067]
pr==pop1
×
(1-0.2)
×
η
△k△k[0068]
po:电机的功率
[0069]
p1:系统所需的平均制动功率η:传动效率,传动的机械系统在制动时,提供与效率相应的制动阻尼0.2:电动机的内阻消耗了20%的制动能量
[0070]
ed制动率以100s运行为一个周期,制动时间所占比率根据制动电流udc/r与制动率e d选择制动单元。
[0071]
根据制动功率
×
制动时间,计算出节省电量,通过和不使用耗电量对比,根据不同制动选取,获得30%左右的节省能量。
[0072]
本发明提出的一种势能回收装置填补仓储自动化设备在能量回收领域的空白,可实现首次在堆垛机、四向穿梭车提升机以及agv智能搬运机器人等设备的电机加装势能回收装置,助力“双碳”在物流行业的落地,推动供应链产业绿色化。
[0073]
实施例2(制动过程能量计算):
[0074]
通常变频器输入电压为380-460v时,变频器直流母线电压最大值为800v,为得到势能回收单元所需的能量回收容量,需要知道制动扭矩、负载制动时产生的能量大小。
[0075]
电机和负载动能=1/2jω2[0076]
在此j=电机和驱动器的总转动惯量(kgm2)
[0077]
ω=角速度(弧度/秒),或者2πn/60
[0078]
因为能量与角速度的平方成正比,系统的最大能量集中在高速状态,会在开始减速的时候传递能量给势能回收单元。根据变频器固有特征,当输出频率小于基础频率时,为恒定v/ f比值控制(力矩恒定);当输出频率大于基础频率时,为恒电压控制(功率恒定)。假如电机运转在基础频率之上,传递给势能回收单元的能量为定值,直到降至基础频率以下。
[0079]
基础数据:
[0080]
电机及驱动30kw;电机额定转矩191nm;减速时间tb;重复周期时间30s;负载转动惯量(j)10kgm2;电机额定转速1500;确定减速时间tb:;最大减速发生在电机额定转矩的150%;最大值mb max=1.5x191=286.5;最快减速时间tb:;最快减速时间tb:;确定一个实际需要的减速时间,t=7s;计算减速时间为7s时需要的制动转矩mb:
[0081]
制动功率pb:
[0082]
损耗:行走摩擦损耗5%+机械转换损耗5%+dcdc等转换损耗5%
[0083]
设备制动过程产生的功率约为:35.21x(1-0.15)≈30(kw)
[0084]
查询资料得出变频器直流母线制动电压约640v
[0085]
制动电流:30x10^3/640=46.875(a)
[0086]
另外,本发明优选的势能回收单元规格参数为:
[0087]
额定功率确定:根据制动过程产生的制动电流46.875a,得出势能回收单元运行时额定电流不能小于此值。选用3台dc-dc模块并联,单台额定功率6kw,峰值电流100a,640 v左右的额定电流约为17.5a,过载能力150%6秒;3台并联后的额定功率为18kw,峰值电流270a
[0088]
直流母线额定电压640v时额定电流约为:52.5a(大于实际制动电流)
[0089]
dc-dc模块电压确定:300-700v(700v规格为应大于制动电压640v)
[0090]
储能类型:电池(磷酸铁锂)
[0091]
保护:过流保护、短路保护、电池反接保护、直流防雷保护等
[0092]
另外,本发明优选的势能回收单元功能及要求为:
[0093]
(1)基于三个pm240-2功率模块开发,不改变变频器原有电路及正常工作时允许电压。
[0094]
(2)实现三个电机制动时能量回收和利用,不回馈电网,不使用制动电阻消耗。
[0095]
(3)要求制动时产生的能量90%以上可回收,存储起来的电能也需要能释放回直流母线供电机使用,设备断电不启用需保证势能回收装置不向直流母线供电。
[0096]
(4)具备可视化数据,可通过通讯协议发送数据到服务器。
[0097]
(5)势能回收单元传输数据:剩余电量,当前充电/放电状态;当前直流母线电压;当前充电电流;当前充电电压;当前放电电流;当前放电电压;当前故障代码;当前设备温度;设定时间势能回收量;设定时间势能释放量。上位机传输:设定时间t。
[0098]
(6)具备过充、过放、过流、温度、短路保护功能。
[0099]
最后,本发明优选的,本发明的未尽述之处均采用现有技术中的成熟产品及成熟技术手段。
[0100]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,
而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1