一种模块化多电平换流器子模块的均压排序方法
1.本发明涉及一种模块化多电平换流器子模块的均压排序方法,属于模块化多电平换流器技术领域。
背景技术:
2.近年来,模块化多电平换流器(modular multilevel converter,mmc),因其便于选择不同的子模块数量以适应不同的功率和电压要求,具有波形质量高、故障处理能力强、阶跃电压低和避免动态均压等优势,在柔性直流输电中得到了广泛的应用和发展,并且mmc的应用场景已由最初的低电压水平的示范工程,发展至高压多端柔性输电系统,展现出其良好的发展前景。
3.在模块化多电平换流器运行的过程中,排序均压控制是控制换流器运行的一项关键技术,随着mmc工程朝着高电压电平、大容量的方向快速发展,研究如何降低电力电子开关器件igbt的开关频率、减少子模块电容电压排序计算量的mmc均压策略与算法,对于提高mmc平稳运行能力、降低开关损耗具有重要意义。现有的均压策略方法研究一类为提出电容电压限制为基础的降低开关频率的策略,但在电压排序方法未进行减少复杂度的优化,未降低排序工作的计算复杂度;另一类为提出降低分组排序策略降低了排序的计算复杂度,但未涉及到降低开关频率。
4.公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域普通技术人员所公知的现有技术。
技术实现要素:
5.本发明的目的在于克服现有技术中的不足,提供一种模块化多电平换流器子模块的均压排序方法,采用新排序思路降低子模块电容电压排序的计算量,从整体上降低损耗,延长模块化多电平换流器的使用寿命,提高了模块化多电平换流器的的平稳运行能力;同时在子模块电容电压不越动态限值的情况下尽可能降低开关频率,减少电力电子开关器件的损耗。
6.为达到上述目的,本发明是采用下述技术方案实现的:
7.本发明公开了一种模块化多电平换流器子模块的均压排序方法,包括如下步骤:
8.获取电压数据;
9.根据所述电压数据,计算子模块的电容电压的动态上限值和动态下限值;
10.根据所述动态上限值和动态下限值,处理越限子模块的投切状态,从而计算越限子模块的最终数量;
11.采用最近电平调制法,计算桥臂当前时刻与上一时刻所需要投入的子模块数量的差值;
12.根据所述差值以及越限子模块的最终数量,计算当前时刻桥臂最终投入的子模块数量n
(t)
;
13.筛选出运行电压最小或最大的前n
(t)
个子模块,进行子模块的投切。
14.进一步的,所述电压数据包括控制系统的参考交流电压、子模块的电容电压额定值、子模块的运行电压测量值和子模块的运行电压平均值。
15.进一步的,所述子模块的电容电压的动态上限值和动态下限值的表达式如下:
[0016][0017]
其中,u
c.limitmax
表示子模块的电容电压的动态上限值,u
c.limitmin
表示子模块的电容电压的动态下限值,u
cn
表示子模块的电容电压额定值,uc.avg表示子模块的运行电压平均值,m表示控制精细参数,0≤m。
[0018]
进一步的,根据所述动态上限值和动态下限值,处理越限子模块的投切状态,从而计算越限子模块的最终数量,具体步骤如下:
[0019]
对于越电压上限的子模块,若处于投入状态且本次步长时桥臂电流小于0,不进行处理且越限子模块的初始数量不变;
[0020]
对于越电压上限的子模块,若处于投入状态且本次步长时桥臂电流大于0,则进行切除处理且越限子模块的初始数量+1;
[0021]
对于越电压上限的子模块,若处于切除状态且本次步长时桥臂电流大于0,则不进行处理且越限子模块的初始数量不变;
[0022]
对于越电压上限的子模块,若处于切除状态且本次步长时桥臂电流小于0,则进行投入处理且越限子模块的初始数量-1;
[0023]
对于越电压下限的子模块,若处于投入状态且本次步长时桥臂电流小于0,则进行切除处理且越限子模块的初始数量+1;
[0024]
对于越电压下限的子模块,若处于投入状态且本次步长时桥臂的电流大于0,则不进行处理且越限子模块的初始数量不变;
[0025]
对于越电压下限的子模块,若处于切除状态且本次步长时桥臂电流大于0,则进行投入处理且越限子模块的初始数量-1;
[0026]
对于越电压下限的子模块,若处于切除状态且本次步长时桥臂电流小于0,则不进行处理且越限子模块的初始数量不变;
[0027]
处理完毕后,得到桥臂的越限子模块的最终数量n
beyond
。
[0028]
进一步的,所述当前时刻桥臂最终投入的子模块数量n
(t)
为当前时刻上桥臂最终投入的子模块数量n
u(t)
,或当前时刻下桥臂最终投入的子模块数量n
l(t)
,具体表达式如下:
[0029][0030][0031]
其中,n
u(t)
表示当前时刻t上桥臂最终投入的子模块数量,δn
u(t)
表示上桥臂的当前时刻需要投入的子模块数量与上一时刻最终投入的子模块数量的差值,表示当前时刻t上桥臂的越限子模块的最终数量;
[0032]nl(t)
表示当前时刻t下桥臂最终投入的子模块数量,δn
l(t)
表示下桥臂的当前时刻需要投入的子模块数量与上一时刻最终投入的子模块数量的差值,表示当前时刻t下桥臂的越限子模块的最终数量。
[0033]
进一步的,对于当前时刻桥臂最终投入的子模块数量n
(t)
,若数值为正数时,表示投入子模块;若数值为负数时,表示切除子模块;若数值为0时,表示保持处理越限子模块后状态不变。
[0034]
进一步的,筛选出运行电压最小或最大的前n
(t)
个子模块,进行子模块的投切,包括如下步骤:
[0035]
首先对子模块进行分类处理,分为六类,具体如下:
[0036]
①
上一时刻投入,当前时刻未越限保持投入;
[0037]
②
上一时刻投入,当前时刻越下限仍然投入充电
[0038]
③
上一时刻切除,当前时刻未越限保持切除;
[0039]
④
上一时刻切除,当前时刻越上限仍然切除保持不充电;
[0040]
⑤
上一时刻投入,当前时刻越上限切除停止充电;
[0041]
⑥
上一时刻切除,当前时刻越下限投入充电;
[0042]
其次,若当前时刻桥臂最终投入的子模块数量的绝对值小于等于
①
或
③
类的模块总数,在类型
①
子模块进行排序选择切除或在类型
③
的子模块进行排序选择投入;
[0043]
若当前时刻桥臂最终投入的子模块数量的绝对值大于
①
或
③
类的模块总数,且小于等于
①②
或
③④
类的模块总数,则超出部分,类型
①
由类型
②
补充,类型
③
由类型
④
的补充,完成排序选择投切;
[0044]
若当前时刻桥臂最终投入的子模块数量的绝对值大于
①②
或
③④
类的模块总数,则超出部分,类型
①②
由类型
⑤
补充,类型
③④
由类型
⑥
补充,完成排序选择投切。
[0045]
进一步的,筛选出运行电压最小或最大的前n
(t)
个子模块,进行子模块的投切,还包括如下步骤:
[0046]
判断桥臂的电流方向,若桥臂的电流方向为正,则投入运行电压最小的前n
(t)
个切除状态的子模块或切除运行电压最大的前n
(t)
个投入状态子模块;
[0047]
若桥臂的电流方向为负,则投入运行电压最大的前n
(t)
个切除状态的子模块或切除运行电压最小的前n
(t)
个投入状态的子模块。
[0048]
与现有技术相比,本发明所达到的有益效果:
[0049]
本发明一方面采用子模块的电容电压的动态限值判定方式,极大减少了子模块的投切数量,降低了换流器的开关损耗;另一方面减少动作投切数量后可以采用新排序思路,仅需排出或筛选出运行电压最小或最大的前n
(t)
个子模块,代替通用的冒泡全排序法,降低了子模块电容电压排序的计算量,从整体上降低损耗,延长使用寿命的同时提高了模块化多电平换流器的平稳运行能力。
[0050]
本发明通过对子模块的电容电压的动态限值中的控制精细参数m做出调整,能够适用于不同规格的模块化多电平换流器,适用范围广。
附图说明
[0051]
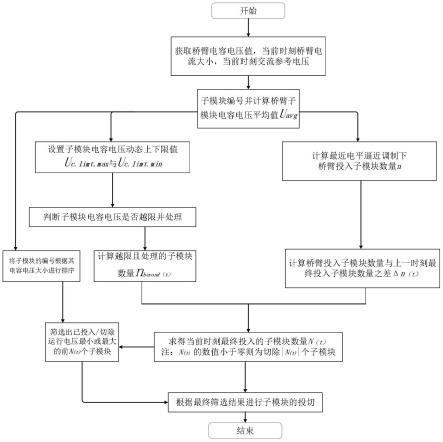
图1是一种模块化多电平换流器子模块的均压排序方法的整体流程图;
[0052]
图2是模块化多电平换流器的结构示意图;
[0053]
图3是越限子模块的处理流程图;
[0054]
图4是一种类型的子模块状态变动的实施例示意图;
[0055]
图5是两种类型的子模块状态变动的实施例示意图。
具体实施方式
[0056]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0057]
实施例
[0058]
本实施例提供了一种模块化多电平换流器子模块的均压排序方法,如图1所示,包括如下步骤:
[0059]
步骤一:获取相关数据,包括控制系统的参考交流电压、子模块的电容电压额定值以及子模块的运行电压测量值。
[0060]
根据子模块的运行电压测量值,计算子模块的运行电压平均值uc.avg。
[0061]
需要说明的是,本实施例的桥臂指代上桥臂或者下桥臂,模块化多电平换流器如图2所示,上桥臂和下桥臂均包括n个子模块sm,默认各子模块规格相同,即子模块的电容电压额定值u
cn
相同。
[0062]
为便于后续流程生成对应子模块的开关信号,可以将桥臂上的子模块按照顺序进行编号,例如sm1、sm2、
…
、smn。
[0063]
步骤二:计算子模块的电容电压的动态上限值和动态下限值;
[0064]
具体表达式如下:
[0065][0066]
其中,u
c.limitmax
表示子模块的电容电压的动态上限值,u
c.limitmin
表示子模块的电容电压的动态下限值,u
cn
表示子模块的电容电压额定值,uc.avg表示子模块的运行电压平均值,m表示控制精细参数,0≤m。
[0067]
步骤三:根据动态上限值和动态下限值,处理越限子模块的投切状态,从而计算越限子模块的最终数量;
[0068]
如图3所示,具体步骤如下:
[0069]
对于越电压上限的子模块,若处于投入状态且本次步长时桥臂电流小于0,不进行处理且越限子模块的初始数量不变;
[0070]
对于越电压上限的子模块,若处于投入状态且本次步长时桥臂电流大于0,则进行切除处理且越限子模块的初始数量+1;
[0071]
对于越电压上限的子模块,若处于切除状态且本次步长时桥臂电流大于0,则不进行处理且越限子模块的初始数量不变;
[0072]
对于越电压上限的子模块,若处于切除状态且本次步长时桥臂电流小于0,则进行投入处理且越限子模块的初始数量-1;
[0073]
对于越电压下限的子模块,若处于投入状态且本次步长时桥臂电流小于0,则进行切除处理且越限子模块的初始数量+1;
[0074]
对于越电压下限的子模块,若处于投入状态且本次步长时桥臂的电流大于0,则不进行处理且越限子模块的初始数量不变;
[0075]
对于越电压下限的子模块,若处于切除状态且本次步长时桥臂电流大于0,则进行
投入处理且越限子模块的初始数量-1;
[0076]
对于越电压下限的子模块,若处于切除状态且本次步长时桥臂电流小于0,则不进行处理且越限子模块的初始数量不变;
[0077]
处理完毕后,得到桥臂的越限子模块的最终数量n
beyond
。
[0078]
步骤四:计算最近电平调制下的桥臂当前时刻与上一时刻所需要投入的子模块数量之差。
[0079]
首先,根据下述公式计算桥臂需要投入运行的子模块数量:
[0080][0081][0082]
其中,n
u(t)
表示最近电平调制下的上桥臂所需要投入的子模块数量,n
l(t)
表示最近电平调制下的下桥臂所需要投入的子模块数量,n
pm
表示单个桥臂所含子模块的总数,u
s(t)
表示控制系统的参考交流电压,是一个随着时间变化的函数,例如正弦交流波,u
cn
表示子模块的电容电压额定值,round表示取最近整数的函数。
[0083]
δn
u(t)
=n
u(t)-n
u(t-1)
[0084]
δn
l(t)
=n
l(t)-n
l(t-1)
[0085]
其中,δn
u(t)
表示最近电平调制下的上桥臂当前时刻与上一时刻所需要投入的子模块数量的差值,n
u(t)
表示最近电平调制下的上桥臂当前时刻所需要投入的子模块数量,n
u(t-1)
表示最近电平调制下的上桥臂上一时刻所需要投入的子模块数量;δn
l(t)
表示最近电平调制下的下桥臂当前时刻与上一时刻所需要投入的子模块数量的差值,n
l(t)
表示最近电平调制下的下桥臂当前时刻所需要投入的子模块数量,n
l(t-1)
表示最近电平调制下的下桥臂上一时刻所需要投入的子模块数量。
[0086]
步骤五:计算当前时刻桥臂最终投入的子模块数量。
[0087]
具体表达式如下:
[0088][0089][0090]
其中,n
u(t)
表示当前时刻t上桥臂最终投入的子模块数量,δn
u(t)
表示最近电平调制下的上桥臂当前时刻与上一时刻所需要投入的子模块数量的差值,表示当前时刻t上桥臂的越限子模块的最终数量;
[0091]nl(t)
表示当前时刻t下桥臂最终投入的子模块数量,δn
l(t)
表示最近电平调制下的下桥臂当前时刻与上一时刻所需要投入的子模块数量的差值,表示当前时刻t下桥臂的越限子模块的最终数量。
[0092]
其中,对于当前时刻桥臂最终投入的子模块数量n
u(t)
或n
l(t)
,若数值为正数时,表示投入子模块;若数值为负数时,表示切除子模块;若数值为0时,表示保持处理越限子模块后状态不变。
[0093]
步骤六:筛选出运行电压最小或最大的前n
(t)
个子模块,进行子模块的投切。
[0094]
具体步骤如下:
[0095]
首先对子模块进行分类处理,分为六类,具体如下:
[0096]
①
上一时刻投入,当前时刻未越限保持投入;
[0097]
②
上一时刻投入,当前时刻越下限仍然投入充电
[0098]
③
上一时刻切除,当前时刻未越限保持切除;
[0099]
④
上一时刻切除,当前时刻越上限仍然切除保持不充电;
[0100]
⑤
上一时刻投入,当前时刻越上限切除停止充电;
[0101]
⑥
上一时刻切除,当前时刻越下限投入充电;
[0102]
其次,若当前时刻桥臂最终投入的子模块数量的绝对值小于等于
①
或
③
类的模块总数,在类型
①
子模块进行排序选择切除或在类型
③
的子模块进行排序选择投入;若当前时刻桥臂最终投入的子模块数量的绝对值大于
①③
类的模块总数,且小于等于
①②
或
③④
类的模块总数,则超出部分,类型
①
由类型
②
补充,类型
③
由类型
④
的补充,完成排序选择投切;
[0103]
若当前时刻桥臂最终投入的子模块数量的绝对值大于
①②
或
③④
类的模块总数,则超出部分,类型
①②
由类型
⑤
补充,类型
③④
由类型
⑥
补充,完成排序选择投切。
[0104]
具体的,若当前时刻桥臂最终投入的子模块数量为正值,表示最终需要投入子模块,则将最终投入的子模块数量的绝对值与类型
③
模块数量进行比较。
[0105]
响应于最终投入的子模块数量的绝对值小于等于类型
③
模块数量,则在类型
③
的子模块进行排序选择投入。
[0106]
响应于最终投入的子模块数量的绝对值大于类型
③
模块数量,且小于等于类型
③④
类的模块总数时,则超出的部分,类型
③
由类型
④
的补充,完成排序选择投入。
[0107]
响应于最终投入的子模块数量的绝对值大于类型
③④
类的模块总数时,则超出的部分,类型
③④
由类型
⑥
补充,完成排序选择投入。
[0108]
若当前时刻桥臂最终投入的子模块数量为负值,表示最终需要切除子模块,则将最终投入的子模块数量的绝对值与类型
①
模块数量进行比较。
[0109]
响应于最终投入的子模块数量的绝对值小于等于类型
①
模块数量,则在类型
①
的子模块进行排序选择切除。
[0110]
响应于最终投入的子模块数量的绝对值大于类型
①
模块数量,且小于等于类型
①②
类的模块总数时,则超出的部分,类型
①
由类型
②
的补充,完成排序选择切除。
[0111]
响应于最终投入的子模块数量的绝对值大于类型
①②
类的模块总数时,则超出的部分,类型
①②
由类型
⑤
补充,完成排序选择切除。
[0112]
最后判断桥臂的电流方向,若桥臂的电流方向为正,则投入运行电压最小的前n
(t)
个切除状态的子模块或切除运行电压最大的前n
(t)
个投入状态子模块;若桥臂的电流方向为负,则投入运行电压最大的前n
(t)
个切除状态的子模块或切除运行电压最小的前n
(t)
个投入状态的子模块。
[0113]
仅一种类型子模块状态变动的具体示例如图4所示,当前时刻与上一时刻所需要投入的子模块数量的差值δn为:14-12=2。处理的越限子模块类型为
⑤
、
⑥
,桥臂的越限子模块的最终数量n
beyond
为:2-1=1。故最终投入的子模块数量为:2+1=3。故需要重新投入三个子模块,仍为切除状态的三种类型优先选择未越限的类型
③
,从中选择3个电压最低(桥臂电流大于零)或最高(桥臂电流小于零)的进行投入。
[0114]
2种类型子模块状态变动的具体示例如图5所示,当前时刻与上一时刻所需要投入的子模块数量的差值δn为:8-16=-8。处理的越限子模块类型为
⑤
、
⑥
,桥臂的越限子模块的最终数量n
beyond
为:4-1=3。故最终投入的子模块数量为:-8+3=-5。故需要重新切除5个子模块,仍为投入状态的三种类型优先选择未越限的类型
①
,类型
①
的子模块数量为4,全部切除,超出的1个子模块由类型
②
的子模块补充,从类型
②
中选择1个电压最低(桥臂电流大于零)或最高(桥臂电流小于零)的进行切除。
[0115]
综上所述,本发明的技术构思为:一方面采用子模块的电容电压的动态限值判定方式,极大减少了子模块的投切数量,降低了换流器的开关损耗;另一方面采用新排序思路,筛选出运行电压最小或最大的的前n
(t)
个子模块,代替通用的冒泡排序法,降低了子模块电容电压排序的计算量,从整体上降低损耗,延长使用寿命的同时提高了模块化多电平换流器的平稳运行能力。
[0116]
本发明通过对子模块的电容电压的动态限值中的控制精细参数m做出调整,能够适用于不同规格的模块化多电平换流器,适用范围广。
[0117]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1