一种航空通用电机控制器动力线任意接线方式下起动方法
1.本发明属于电机驱动控制技术领域,尤其涉及一种航空通用电机控制器动力线任意接线方式下起动方法。
背景技术:
2.随着航空多电技术以及电动飞机的迅速发展,电机驱动系统在航空作动、燃油泵等多个关键部件中承担重要任务。然而,电机类型多、控制器差异大对后期的产品维护造成很大困难,对应用场合不同、功率等级基本一致的电机控制器进行统一化设计,形成标准化的通用控制器,能够提升航空电机控制器的便利性。不同应用场合的电机供应商不同,制造工艺存在差异,带来电机动力线相序和绝对式位置传感器安装位置不同的问题,难以保证电机控制器和电机动力线相序匹配,导致电机无法起动,通过多次调整接线使电机正常起动增加了调试时间,如何保证任意接线时电机都能够正常起动成为难题。
技术实现要素:
3.本发明目的在于提供一种航空通用电机控制器动力线任意接线方式下起动方法,以解决上述的技术问题。
4.为解决上述技术问题,本发明的一种航空通用电机控制器动力线任意接线方式下起动方法的具体技术方案如下:
5.一种航空通用电机控制器动力线任意接线方式下起动方法,包括如下步骤:
6.步骤1:直流预定位;
7.步骤2:修正绝对式位置传感器安装偏角;
8.步骤3:判断电机动力线正负序;
9.步骤4:修正电角度;
10.步骤5:开环起动测试;
11.步骤6:转速旋转方向修正。
12.进一步地,所述步骤1包括如下具体步骤:
13.任意接线方式下,以通用控制器的uvw坐标系为基准,给定矢量控制中park逆变换的电角度θe=0
°
,实施直流预定位,将转子d轴与通用控制器的u相对齐,记录绝对式位置传感器的读数。
14.进一步地,所述步骤2包括如下具体步骤:
15.根据记录的绝对式位置传感器读数,修正计算的电角度θr,此时θr等于0
°
。
16.进一步地,所述步骤3包括如下具体步骤:
17.给定矢量控制中park逆变换的电角度θe=30
°
,再次实施直流预定位,将d轴旋转30
°
,根据绝对式位置传感器计算的电角度判断三相动力线的正负序,若为30
°
,电机动力线接线为正序;若为-30
°
,则电机动力线接线为负序。
18.进一步地,所述步骤4包括如下具体步骤:
19.若为正序,电角度无需修正,进入步骤5;若为负序,此时空间矢量角度与位置传感器计算的电角度相反,修正电角度使电机满足起动条件。
20.进一步地,所述步骤4的修正规则为:
21.一、电机相序为a-》b-》c,位置传感器反馈角度为30
°
,相序情况为正序,角度不修正;
22.二、电机相序为a-》c-》b,位置传感器反馈角度为-30
°
,相序情况为负序,角度修正,取反;
23.三、电机相序为b-》c-》a,位置传感器反馈角度为30
°
,相序情况为正序,角度不修正;
24.四、电机相序为b-》a-》c,位置传感器反馈角度为-30
°
,相序情况为负序,角度修正,取反;
25.五、电机相序为c-》a-》b,位置传感器反馈角度为30
°
,相序情况为正序,角度不修正;
26.六、电机相序为c-》b-》a,位置传感器反馈角度为-30
°
,相序情况为负序,角度修正,取反。
27.进一步地,所述步骤5包括如下具体步骤:
28.利用绝对式位置传感器计算的电角度θr替代θe进行park变换及park逆变换,电流环开环,直接给定电压矢量进行电机起动测试。
29.进一步地,所述步骤6包括如下具体步骤:
30.给定电压矢量起动测试,判断电机的旋转方向,若为规定的正方向,不修正转速方向,
31.若为反方向旋转,则对转速取反,修正电机的旋转方向。
32.本发明的一种航空通用电机控制器动力线任意接线方式下起动方法具有以下优点:
33.(1)针对航空机载电机驱动系统的统一化需求,提出一种新的永磁电机在动力线任意接线方式下的起动方法,缩短了更换控制器时的调试时间,降低了机载装备寿命周期中的维护难度和成本。
34.(2)不要求绝对式位置传感器与转子磁极的零位重合安装,方法简洁,实施难度低,任意接线方式下可实现电机的可靠起动。
附图说明
35.图1为航空通用电机控制器的控制框图;
36.图2为接线序号1的角度偏差分析示意图;
37.图3为接线序号2的角度偏差分析示意图;
38.图4为接线序号3的角度偏差分析示意图;
39.图5为接线序号4的角度偏差分析示意图;
40.图6为接线序号5的角度偏差分析示意图;
41.图7为接线序号6的角度偏差分析示意图;
42.图8为接线序号1的电机起动波形示意图;
43.图9为接线序号2的电机起动波形示意图;
具体实施方式
44.为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种航空通用电机控制器动力线任意接线方式下起动方法做进一步详细的描述。
45.1.相序匹配原理:
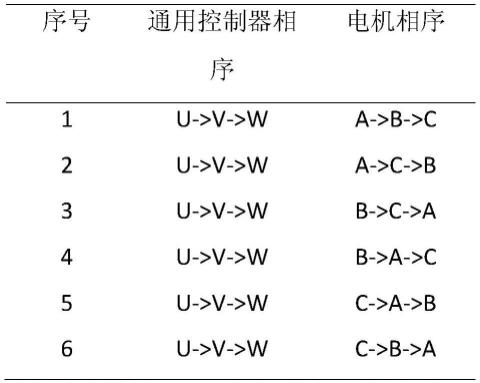
46.用于动力线相序匹配的控制系统框图如图1所示,通用电机控制器的三相相序由脉冲宽度调制模块和电流传感器的顺序定义,控制器定型后相序也是确定的,定义为u-》v-》w,分别对应三个功率端子。电机三相动力线相序定义为a-》b-》c,由于电机三相动力线在通用控制器功率端子上是任意连接的,共6种排列情况,如表1所示。
47.表1三相动力线接线汇总
[0048][0049]
永磁电机控制系统的矢量角是以uvw坐标系为基准,因此abc坐标系下的转子旋转电角度和绝对式位置传感器返回的电角度θr将存在角度偏差。在绝对式位置传感器的零位与电机d轴完全重合条件下,分析表1中六种接线方式对应的角度偏差。
[0050]
(1)接线序号1的角度偏差
[0051]
序号1接线方式下,uvw和abc两个坐标系的位置关系如图2所示,此时两个坐标系完全重合,不存在角度偏差。
[0052]
θr=θeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0053]
式中,θr是绝对式位置传感器返回的角度信息,θe是通用控制器直流定位时给定电角度。
[0054]
(2)接线序号2的角度偏差
[0055]
序号2接线方式下,电机a相和通用控制器u相重合,其余两相与序号1的接线相反,如图3所示。当电流矢量在uvw坐标系下逆时针旋转角度θe,即旋转方向为u-》v-》w,是正序旋转。而在abc坐标系中,由于此时旋转方向是a-》c-》b,是负序,所以角度θr与θe方向相反,此时角度偏差关系为公式2。
[0056]
θr=360
°‑
θeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0057]
(3)接线序号3的角度偏差
[0058]
序号3接线方式下,电机b相和通用控制器u相重合,电机a相和通用控制器u相的电
角度偏差为120
°
,如图4所示。空间矢量在uvw坐标系下逆时针旋转θe,电机的相序b-》c-》a也是正序,故在uvw和abc两种坐标系下的旋转方向一致。此时,空间矢量角θe与绝对位置传感器反馈的角度θr之间的关系见式3。
[0059]
θr=120
°
+θeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0060]
(4)接线序号4的角度偏差
[0061]
序号4接线方式下,电机b相和通用控制器u相重合,如图5所示。电机的相序b-》a-》c是负序,因此当空间矢量角在uvw坐标系下逆时针旋转θe时,在abc坐标系中旋转角度是-θe。再结合电机a相与通用控制器u相的电角度偏差为120
°
,则空间矢量角θe与绝对位置传感器反馈的角度θr的偏差见公式4。
[0062]
θr=120
°‑
θeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0063]
(5)接线序号5的角度偏差
[0064]
序号5接线方式下,电机c相和通用控制器u相重合,此时电机的相序c-》a-》b是正序,如图6所示,电机a相和通用控制器u相的电角度偏差为240
°
。可以看出,空间矢量角θe与绝对位置传感器反馈的角度θr的偏差如公式5。
[0065]
θr=240
°
+θeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0066]
(6)接线序号6的角度偏差
[0067]
序号6接线方式下,电机c相和通用控制器u相重合,此时电机的相序c-》b-》a是负序,如图7所示。该接线方式下,角度θr与θe的方向相反,结合电机a相与通用控制器u相的电角度偏差为240
°
,空间矢量角θe和绝对位置传感器返回的电角度存在角度偏差。
[0068]
θr=240
°‑
θeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0069]
对上述六种情况进行汇总,不同接线方式下的角度偏差θr如表2所示,为实现不同接线方式下区分度,设置θe=30
°
,则任意接线方式下的θr各不相同。
[0070]
表2三相动力线接线汇总
[0071][0072]
从表2可以看出,6种接线方式下存在正序和负序两种情况,从电机起动角度来看,由于电机绕组的对称性,只要是正序接法(表2中的接线序号1、3、5),以通用控制器的u相为基准实施直流定位,直流定位后可能将转子d轴与电机abc中任一相对齐,若能够识别初始位置和电机正负序接法,就能实现电机的可靠起动。以序号3为例,通用电机控制器的u-》v-》w对应的是b-》c-》a,实施直流预定位,转子d轴将与电机b相对齐。构建一个新的坐标系a’b’c’,由于b-》c-》a是正序,可将b相当做新坐标系中的a’相,则b-》c-》a将对应a
’‑
》b
’‑
》c’。
此时d轴与a’相的电角度为0
°
,绝对式位置传感器的读数就是对应于电机b相绕组的初始位置。
[0073]
2.电机起动方法:
[0074]
根据上述相序匹配原理,三相动力线任意接线方式下电机起动步骤为:
[0075]
(1)直流预定位。任意接线方式下,以通用控制器的uvw坐标系为基准,给定矢量控制中park逆变换的电角度θe=0
°
,实施直流预定位,将转子d轴与通用控制器的u相对齐(由于接线的任意性,此时和d轴对齐的可能是电机a、b、c中的任一相),记录绝对式位置传感器的读数。
[0076]
(2)修正绝对式位置传感器安装偏角。根据记录的绝对式位置传感器读数,修正计算的电角度θr,此时应当有θr等于0
°
。
[0077]
(3)判断电机动力线正负序。给定矢量控制中park逆变换的电角度θe=30
°
,再次实施直流预定位,将d轴旋转30
°
,根据绝对式位置传感器计算的电角度判断三相动力线的正负序。若为30
°
,电机动力线接线为正序;若为-30
°
,则电机动力线接线为负序。
[0078]
(4)修正电角度。若为正序,电角度无需修正,进入步骤5;若为负序,此时空间矢量角度与位置传感器计算的电角度相反,修正电角度使电机满足起动条件,修正规则见表3。
[0079]
(5)开环起动测试。利用绝对式位置传感器计算的电角度θr替代θe进行park变换及park逆变换,电流环开环,直接给定电压矢量进行电机起动测试。
[0080]
(6)转速旋转方向修正。给定电压矢量起动测试,判断电机的旋转方向,若为规定的正方向,不修正转速方向,若为反方向旋转,则对转速取反,修正电机的旋转方向。
[0081]
表3三相动力线接线汇总
[0082][0083][0084]
下面通过实施例进行描述:
[0085]
航空应用中常采用高功率密度、高效率的永磁同步电机,因此本发明实施例以安装绝对式位置传感器的表贴式永磁同步电机为研究对象,电机标称参数如表1所示。
[0086]
表1航空作动用永磁同步电机参数
[0087][0088]
实施例包含的具体步骤如下:
[0089]
1.给定d轴电流指令i
dref
=0a,q轴电流i
qref
=10a,空间矢量角θe=0
°
,实施直流预定位。
[0090]
2.等待电机位置稳定后,读取位置传感器的数值θ0,修正由位置传感器计算的电角度θr,修正后θr=0
°
。
[0091]
3.给定矢量控制中的电角度为θe=30
°
,再次实施直流预定位。待电机位置稳定后,读取位置传感器的数值θ,计算电机转子偏转电角度θr=θ-θ0,查表3,根据电机转子偏转电角度θr判断三相动力线的正负序。
[0092]
4.动力线若为正序接法,不修正电角度;若为负序接法,修正电角度,即电角度取反,θr=-θr。
[0093]
5.利用绝对式位置传感器计算的电角度θr进行park逆变换,电机开环起动测试。将电流环开环运行,直接给定d轴电压指令ud=0v,q轴电压uq=40v,使电机空载旋转。
[0094]
6.本实施例中规定逆时针为电机旋转的正方向,若为规定的正方向旋转,不修正转速方向,若为反方向旋转,则修正电机的旋转方向。
[0095]
接线方式序号1时,电机起动波形如图8。电机模型中初始角度设置为0
°
,uvw和abc两个坐标系完全重合,因此任意时刻的θ和θr相等。0~1.0s为给定θe=0
°
的直流定位阶段,角度θr=0。在1.5s时刻,是θe=30
°
的直流定位阶段,此时电机角度θ也是30
°
,与表2中的分析结果一致。1.7s时刻进入正负序判断阶段,此时θe=30
°
,由绝对式位置传感器计算的角度θr也是30
°
,表明此时动力线接线为正序,无需修正电角度。2s之后的起动测试阶段,uq电压为正40v,永磁同步电机正常起动,转速方向为正,θ和θr沿着相同的方向变化,无需对反馈转速进行旋转方向修正。
[0096]
接线方式序号2时,电机起动波形如图9。1s时进入正负序判断阶段,实施给定矢量角θe=30
°
的直流定位,由位置传感器计算的角度θr是-30
°
,表明此时动力线接线为负序,1.7s时修正电角度,得到θr=30
°
。此时,电机角度θ是330
°
,与表2中的分析结果一致。2s时进行起动测试,此时uq电压为正40v,永磁同步电机正常起动,转速方向为负,θ和θr沿着相反的方向变化,可对反馈转速进行旋转方向修正。
[0097]
综上所述,本发明的一种航空通用电机控制器任意接线方式下的起动方法,通过构建通用控制器坐标系和电机坐标系,结合直流定位,分析绝对式位置传感器和空间矢量角的角度偏差特征,划分为正序和负序两种情况,从而针对性设计角度补偿及电机旋转方
向的修正方法,实现了航空电机驱动系统在动力线任意接线方式下的可靠起动。
[0098]
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本发明所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1