一种基于岸基供电的水下机器人供电控制系统及方法与流程
1.本发明涉及水下机器人供电技术领域,具体涉及一种基于岸基供电的水下机器人供电控制系统及方法。
背景技术:
2.随着水下机器人(rov)行业的快速发展,消费类的rov越来越受大众喜爱,这类水下机器人体积小,重量在5kg左右,便于携带和转移,功率一般在1kw左右,价格也比较实惠,可以快速的部署到作业环境中去,比如水下探测、水下取样、水下打捞等等。此类rov目前采用在机组内装配锂电池进行供电,受限于机器本身结构大小,电池容量都不大,续航大概在1~2小时,在机器作业时需要频繁将水下机器人收回充电或者更换电池,无法实现无限续航,不利于机器人长时间的水下作业。
技术实现要素:
3.本发明的目的在于提供一种基于岸基供电的水下机器人供电控制系统及方法,解决现有水下机器人无法实现无限续航的问题。
4.为解决上述的技术问题,本发明采用以下技术方案:一种基于岸基供电的水下机器人供电控制系统,其特征在于:包括水下机器人控制模块、绕线器、移动式岸基供电箱和地面控制器,水下机器人控制模块的通过脐带线缆与移动式岸基供电箱连接,脐带线缆缠绕在绕线器的绕线轮上,移动式岸基供电箱与市电电连接,地面控制器通过线缆与移动式岸基供电箱信号连接;移动式岸基供电箱将市电转换成400~550v的高压直流电通过脐带线缆向水下机器人控制模块持续供电,同时将对地面控制器供电。
5.更进一步的技术方案是所述移动式岸基供电箱包括壳体、设置在壳体内的mcu处理器和交流转高压直流模块、设置在壳体表面的lcd屏幕,水下机器人控制模块包括相互连接的控制单元和高压转低压电路模块,脐带线缆包括高压直流电源线和plc载波通讯线;所述交流转高压直流模块通过电源线与市电电连接,交流转高压直流模块与地面控制器、lcd屏幕、mcu处理器电连接,mcu处理器通过rs485串口与交流转高压直流模块信号连接,mcu处理器与lcd屏幕、地面控制器信号连接;mcu处理器通过plc载波通讯线与控制单元连接,交流转高压直流模块通过高压直流电源线与高压转低压电路模块连接。
6.更进一步的技术方案是所述交流转高压直流模块包括依次连接的防雷电路、emc电路、缓启动电路、全桥整流电路、pfc功率因数校正电路、隔离升压转换电路、第一整流输出电路,pfc功率因数校正电路还依次连接有第一隔离降压转换电路、第二整流输出电路,第一整流输出电路与高压直流电源线连接,第二整流输出电路与地面控制器连接,第二整流输出电路通过电源转换电路与lcd屏幕、mcu处理器、rs485串口连接。
7.更进一步的技术方案是所述缓启动电路与第一单片机连接,第一单片机通过pfc控制芯片与pfc功率因数校正电路连接,adc采样电路与第一整流输出电路连接,并将信号反馈给第二单片机,第二单片机与rs485串口连接,第二单片机通过pfm控制芯片与隔离升
压转换电路连接。
8.更进一步的技术方案是所述高压转低压电路模块包括依次连接的输入保险、防雷电路、emc电路、缓启动电路、滤波电路、第二隔离降压转换电路、第三整流输出电路,第三整流输出电路与控制单元(101)连接,第三整流输出电路依次与adc采样电路、比较器、第三单片机连接,第三单片机通过pfm控制芯片与第二隔离降压转换电路连接。
9.更进一步的技术方案是6、所述系统的供电控制方法如下:电源部分:100~240v交流电输入到交流转高压直流模块,交流转高压直流模块转化输出2个电压,分别是高压dc490v和dc24v,dc490v通过脐带线缆直接向水下机器人输送;dc490v经过高压转低压电路模块转换成低压直流电,供水下机器人使用;dc24v经过电源转换转化为5v给lcd屏幕、rs485接口供电,转化为3.3v给mcu处理器供电;dc24v还向地面控制器供电,完成整个系统的无限供电续航;交互部分:移动式岸基供电箱上电后,交流转高压直流模块默认关闭dc490v输出,dc24v默认输出,mcu处理器、lcd屏幕、rs485串口上电工作;交流转高压直流模块进行自检,自检合格后,将自检结果通过rs485串口发送给mcu处理器,mcu处理器通过uart接口把状态更新到lcd屏幕,同时mcu处理器也会把状态通过eth网口发送到脐带线缆的plc载波通讯线上,地面控制器获得移动式岸基供电箱的状态并显示;当自检状态一切正常后,lcd屏幕弹出dc490v的开关按钮,可触摸屏幕进行开启或者关闭dc490v的输出;当dc490v电源输出后,水下机器人控制模块便获得电源且处于待开机状态,再打开地面控制器上的开关后,水下机器人的开机信号通过plc载波通讯线传输到水下机器人控制模块,水下机器人电源开启,水下机器人开始作业。
10.与现有技术相比,本发明的有益效果是:通过移动式岸基供电箱将市电转换成400~550v高压直流电,通过脐带线缆向水下机器人持续供电,同时对地面控制器进行供电,实现整个水下机器人操作系统的无限续航;同时整个控制系统便携且可移动,便于在不同区域内进行作业。
附图说明
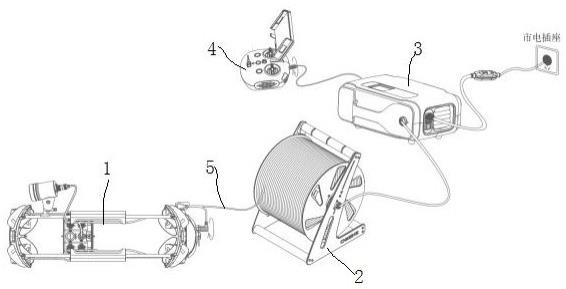
11.图1为本发明的结构示意图。
12.图2为本发明的结构原理框图。
13.图3为本发明中移动式岸基供电箱的结构原理框图。
14.图4为本发明中交流转高压直流模块的原理图。
15.图5为本发明中高压转低压电路模块的原理图。
16.图中:1-水下机器人控制模块,101-控制单元,102-高压转低压电路模块,2-绕线器,3-移动式岸基供电箱,301-mcu处理器,302-交流转高压直流模块,303-lcd屏幕,4-地面控制器,5-脐带线缆。
具体实施方式
17.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不
用于限定本发明。
18.图1示出了一种基于岸基供电的水下机器人供电控制系统,包括水下机器人控制模块1、绕线器2、移动式岸基供电箱3和地面控制器4,水下机器人控制模块1的通过脐带线缆5与移动式岸基供电箱3连接,脐带线缆5缠绕在绕线器2的绕线轮上,移动式岸基供电箱3与市电电连接,地面控制器4通过线缆与移动式岸基供电箱3信号连接;移动式岸基供电箱3将市电转换成400~550v的高压直流电通过脐带线缆5向水下机器人控制模块1持续供电,同时将对地面控制器4供电。
19.为实现上述系统,如图2、3所示,所述移动式岸基供电箱3包括壳体、设置在壳体内的mcu处理器301和交流转高压直流模块302、设置在壳体表面的lcd屏幕303,水下机器人控制模块1包括相互连接的控制单元101和高压转低压电路模块102,脐带线缆5包括高压直流电源线和plc载波通讯线;所述交流转高压直流模块302通过电源线与市电电连接,交流转高压直流模块302与地面控制器4、lcd屏幕303、mcu处理器301电连接,mcu处理器301通过rs485串口与交流转高压直流模块302信号连接,mcu处理器301与lcd屏幕303、地面控制器4信号连接;mcu处理器301通过plc载波通讯线与控制单元101连接,交流转高压直流模块302通过高压直流电源线与高压转低压电路模块102连接。
20.如图4所示,所述交流转高压直流模块302包括依次连接的防雷电路、emc电路、缓启动电路、全桥整流电路、pfc功率因数校正电路、隔离升压转换电路、第一整流输出电路,pfc功率因数校正电路还依次连接有第一隔离降压转换电路、第二整流输出电路,第一整流输出电路与高压直流电源线连接,第二整流输出电路与地面控制器4连接,第二整流输出电路通过电源转换电路与lcd屏幕303、mcu处理器301、rs485串口连接。所述缓启动电路与第一单片机连接,第一单片机通过pfc控制芯片与pfc功率因数校正电路连接,adc采样电路与第一整流输出电路连接,并将信号反馈给第二单片机,第二单片机与rs485串口连接,第二单片机通过pfm控制芯片与隔离升压转换电路连接。
21.100~240v交流电首先经过防雷保护电路、emc抗干扰电路,起到防雷击或热插火花损坏和抑制电磁辐射作用;然后经过一个缓启动电路,避免电压过快上升冲击,该电路通过一个防浪涌电阻提供一个短暂的电源给第一单片机,该单片机控制缓慢上电;单片机控制上电输入到全桥整流电路到dc319v输出,该电压再经过pfc功率因数校正电路升压到dc350v,dc350v再经过隔离升压转换电路升压到交流490v输出,交流490v再经过第一整流输出电路输出直流dc490v;同理,第二整流输出电路输出直流dc24v;第二单片机通过比较电路、adc采样电路对dc490v电压电流进行实时监控,从而及时做出短路保护、过流保护、过压输出保护、欠压输出保护动作。第二单片机还支持rs485通讯,可以接收指令进行控制490v电路的pfm控制芯片,从而达到遥控开关的功能;此外,rs485接口还可以把监测到的状态向外发送。
22.如图5所示,所述高压转低压电路模块102包括依次连接的输入保险、防雷电路、emc电路、缓启动电路、滤波电路、第二隔离降压转换电路、第三整流输出电路,第三整流输出电路与控制单元101连接,第三整流输出电路依次与adc采样电路、比较器、第三单片机连接,第三单片机通过pfm控制芯片与第二隔离降压转换电路连接。
23.高压直流电dc490v输入端带有一个保险丝保护,避免输入过载;经过输入保险后,有防雷设计电路和emc电路,起到防雷击或热插火花损坏和抑制电磁辐射作用;缓启动电路
让dc490v缓慢上升,避免电压过快上升造成冲击损坏;滤波电路可以过滤掉大部分纹波噪声,保持电源干净;dc490v经过第二隔离降压转换电路后形成交流的24v电源,再经过第三整流输出电路,即可输出直流dc24v,给水下机器人的控制单元101供电,所述控制单元101控制整个机器人的电气元件,包括推进器、摄像头、灯光、声呐等等。第三单片机通过比较电路、adc采样电路对dc24v电压电流进行实时监控,从而及时做出短路保护、过流保护、过压输出保护、欠压输出保护动作。
24.上述基于岸基供电的水下机器人供电控制系统的控制方法如下:电源部分:100~240v交流电输入到交流转高压直流模块302,该模块转化输出2个电压,分别是高压dc490v和dc24v,dc490v通过脐带线缆5直接向水下机器人输送;dc490v经过高压转低压电路模块102转换成低压直流电,供水下机器人使用;dc24v经过电源转换转化为5v给lcd屏幕、rs485接口供电,转化为3.3v给mcu处理器供电;dc24v还向地面控制器4供电,完成整个系统的无限供电续航。
25.交互部分:移动式岸基供电箱3上电后,交流转高压直流模块302默认关闭dc490v输出,dc24v默认输出,mcu处理器301、lcd屏幕303、rs485串口上电工作;交流转高压直流模块302进行自检,自检合格后,将自检结果通过rs485串口发送给mcu处理器301,mcu处理器301通过uart接口把状态更新到lcd屏幕303,同时mcu处理器301也会把状态通过eth网口发送到脐带线缆5的plc载波通讯线上,地面控制器4获得该电源系统的状态并显示;当自检状态一切正常后,lcd屏幕303弹出dc490v的开关按钮,可触摸屏幕进行开启或者关闭dc490v的输出;当dc490v电源输出后,水下机器人控制模块1便获得电源且处于待开机状态,再打开地面控制器4上的开关后,水下机器人的开机信号通过plc载波通讯线传输到水下机器人控制模块1,水下机器人电源开启,水下机器人开始作业。
26.地面控制器4连接移动式岸基供电箱3,移动式岸基供电箱3通过脐带线缆5连接水下机器人rov,带有漏保组件的电源线连接市电插座与移动式岸基供电箱3进行输入交流电,然后打开lcd屏幕303的高压直流电开关,将高压直流电通过脐带线缆5输送到水下的rov,lcd屏幕303会通过rs485接口实时监控电源模块的工作状态并显示,如电压、电流、温度、保护状态、警告状态;此时再打开地面控制器4的电源开关,遥控rov开机,将高压直流电转变成低压直流电输送给rov的各控制单元,此时完成rov系统与岸基供电系统的电源+通信部署,实现从岸上市电源源不断向rov提供电源动力。同时移动式岸基供电箱3还将交流电转变为一个低压的直流电,为移动式岸基供电箱3和地面控制器4供电,实现整个rov操作系统的无限续航。
27.rov控制单元数据通过脐带线缆5利用plc载波通讯技术传输到移动式岸基供电箱3,数据包括图像、传感器数据、姿态、声呐等数据,移动式岸基供电箱3再把数据传输给地面控制器4,地面控制器4wifi或usb或网口形式将数据传输给终端设备,终端设备或地面控制器4的数据也通过此通讯链路把数据传输到rov,从而实现对rov的实时操作。
28.尽管这里参照本发明的多个解释性实施例对本发明进行了描述,但是,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本技术公开的原则范围和精神之内。更具体地说,在本技术公开、附图和权利要求的范围内,可以对主题组合布局的组成部件或布局进行多种变形和改进。除了对组成部件或布局进行的
变形和改进外,对于本领域技术人员来说,其他的用途也将是明显的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1