伺服电机的标定方法、装置、可读存储介质和机器人与流程
本发明涉及伺服电机,具体而言,涉及一种伺服电机的标定方法、装置、可读存储介质和机器人。
背景技术:
1、伺服电机是工业机器人的重要驱动部件,伺服电机的可持续工作范围的标定是否准确直接影响到工业机器人的持续性能力的发挥和工业机器人的额定性能的发挥。
2、相关技术方案中,可持续工作范围通常采用对托电机的方式来实现标定。具体地,在被测电机的基础上利用联轴器来连接一个加载电机,在标定过程中,加载电机处于扭矩模式,被测电机处于速度模式,通过设定加载电机的扭矩值或电流值,设定被测电机的运转匀速速度,然后监控被测电机的温升,来标定伺服电机的可持续工作范围。
3、或者被测电机处于扭矩模式,加载电机处于速度模式,通过设定被测电机的扭矩值或电流值,设定加载电机的运转匀速速度,然后监控被测电机的温升,来标定伺服电机的可持续工作范围。
4、本领域的技术人员发现,上述标定方式存在以下弊端:
5、需要使用加载电机、联轴器以及与加载电机、联轴器配合使用的其它部件(如力矩传感器)才能实现标定,标定的成本比较高,并且上述标定方案结构复杂,可能需要额外的标定平台。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、为此,本发明的第一方面在于,提供了一种伺服电机的标定方法。
3、本发明的第二方面在于,提供了一种伺服电机的标定装置。
4、本发明的第三方面在于,提供了另一种伺服电机的标定装置。
5、本发明的第四方面在于,提供了一种可读存储介质。
6、本发明的第五方面在于,提供了一种机器人。
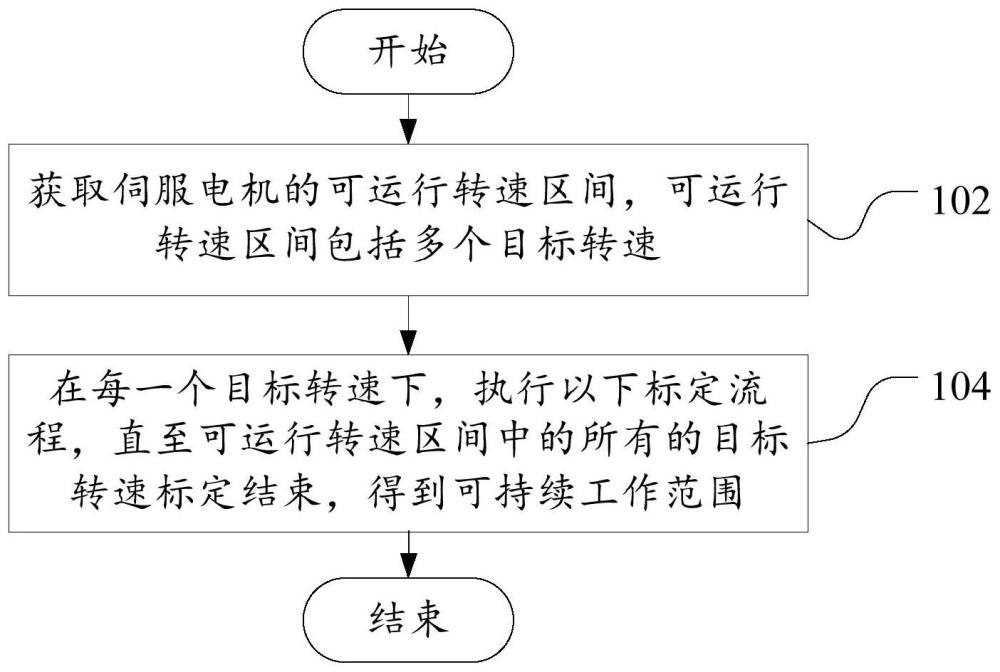
7、有鉴于此,本发明的第一方面提供了一种伺服电机的标定方法,伺服电机关联有驱动器,标定方法包括:获取伺服电机的可运行转速区间,可运行转速区间包括多个目标转速;在每一个目标转速下,执行以下标定流程,直至可运行转速区间中的所有的目标转速标定结束,得到可持续工作范围;在标定流程下,执行以下步骤:通过驱动器控制伺服电机以力矩模式运行;获取每一设定参数下,伺服电机自启动至转速维持在目标转速的情况下,伺服电机的温升值;将温升值达到温升指标时的设定参数作为目标转速对应的标定参数。
8、本技术的技术方案提出了一种用于伺服电机的标定方法,在该标定方法中,可以实现伺服电机的可持续工作范围的标定。相对于相关技术方案,无需使用加载电机和联轴器,仅需使用驱动器既可以实现控制,因此,降低了标定所需的成本。
9、此外,由于无需使用加载电机、联轴器等器件,因此,整个标定的过程摆脱了待测的伺服电机、加载电机、联轴器之间对同轴度的要求,也无需考虑待测的伺服电机与加载电机之间因轴径不同,而额外需要匹配对应的对托平台,降低了标定的复杂程度。
10、在上述技术方案中,通过控制伺服电机以力矩模式运行,以便在力矩模式下,伺服电机进行运转,并使得电机的转速升高至目标转速,而在伺服电机运转过程中,其自身会产生热量,自身的温度会升高。其中,由于伺服电机的温升值是用于衡量可持续工作范围的指标。因此,通过获取自伺服电机驱动后伺服电机的温度值,以及确定伺服电机的转速达到目标转速后,伺服电机的温度值,进而知悉伺服电机的温升值。
11、若伺服电机的温升值达到温升指标的情况下,认为当前伺服电机的设定参数是该目标转速下的标定参数,进而实现可持续工作范围中目标转速的标定,通过遍历可运行转速区间中的所有的目标转速,即可实现可持续工作范围的标定。
12、在上述技术方案中,设定参数是用于在力矩模式下,控制伺服电机进行转速调整的参数。
13、另外,本技术提出的伺服电机的标定方法还具有以下附加技术特征。
14、在上述技术方案中,每一设定参数包括第一参数和第二参数,第一参数和第二参数的绝对值相同,控制伺服电机以力矩模式运行,具体包括:获取伺服电机的转速;根据伺服电机的转速重复以下控制步骤,直至伺服电机的温升值的波动小于预设值;基于伺服电机的温升值未达到温升指标,增大设定参数,直至增大后的设定参数对应的温升值达到温升指标;控制步骤包括:基于伺服电机的转速增加到目标转速,控制伺服电机以第一参数运行;基于伺服电机的转速降低到目标转速,控制伺服电机以第二参数运行。
15、在上述任一技术方案中,设定参数包括:扭矩或电流。
16、在该技术方案中,通过限定设定参数由第一参数以及第二参数的绝对值相同,以便在获取得到伺服电机的转速后,根据伺服电机的转速动态选择第一参数运行还是第二参数运行,在此过程中,可以使得伺服电机的转速稳定在目标转速的附近,进而满足可持续工作范围在标定过程中,对伺服电机的转速的要求。
17、在上述技术方案中,通过获取伺服电机的温度值,以便根据伺服电机的温度值来确定温升值,进而根据温升值的波动情况来确定伺服电机的温升值是否趋于稳定,以便在伺服电机的温升值趋于稳定的情况下,判断是否达到温升指标,从而确定当前的设定参数是否为目标转速对应的标定参数。
18、在上述技术方案中,考虑到在目标转速下的设定参数过小,伺服电机的温升值一直无法达到温升指标,此时,则认为当前的设定参数不适合作为可持续工作范围,通过增大设定参数,以便重新对目标转速下更新的设定参数是否可以作为可持续工作范围进行判断,直到找到合适的设定参数。
19、在该技术方案中,通过判断伺服电机的温升值与温升指标之间的关系,以及增大设定参数,提高了确定得到的可持续工作范围的准确性。
20、在上述任一技术方案中,控制伺服电机以力矩模式运行,还包括:基于伺服电机的温升值大于温升指标,降低设定参数。
21、在该技术方案中,通常情况下,温升指标是伺服电机的最大温升值,当伺服电机的温升值超过最大温升值的情况下,认为伺服电机存在过载以及过热的情况,若一直保持当前状态,伺服电机极易出现烧毁。
22、为了避免上述情况的出现,本技术的技术方案具体限定了在检测到温升值超过最大温升值的情况下,降低设定参数,以便降低伺服电机的发热量,从而降低其出现烧毁的几率,以便起到了保护伺服电机的作用。
23、在上述任一技术方案中,还包括:获取伺服电机所处环境的环境温度;根据环境温度确定温升指标。
24、在该技术方案中,考虑到伺服电机所处的环境不同,伺服电机散热的能力也不一样,对可持续工作范围也会产生影响,因此,通过获取环境温度,以便根据环境温度来选取对应的温升指标,从而提高了可持续工作范围判定的准确性。
25、在其中一个技术方案中,可以预先构建环境温度与温升指标之间的对应关系,以便在确定环境温度之后,可以根据对应关系直接确定温升指标。
26、在上述任一技术方案中,还包括:根据每一个目标转速对应的标定参数得到可持续工作范围的示意图。
27、在该技术方案中,通过得到可持续工作范围的示意图,以便用户直接使用,进而选择合理的设定参数控制伺服电机运行。
28、本发明的第二方面提供了一种伺服电机的标定装置,伺服电机关联有驱动器,标定装置包括:获取单元,用于获取伺服电机的可运行转速区间,可运行转速区间包括多个目标转速;标定单元,用于在每一个目标转速下,执行以下标定流程,直至可运行转速区间中的所有的目标转速标定结束,得到可持续工作范围;在标定流程下,执行以下步骤:通过驱动器控制伺服电机以力矩模式运行;获取每一设定参数下,伺服电机自启动至转速维持在目标转速的情况下,伺服电机的温升值;将温升值达到温升指标时的设定参数作为目标转速对应的标定参数。
29、本技术的技术方案提出了一种伺服电机的标定装置,可以实现伺服电机的可持续工作范围的标定。相对于相关技术方案,无需使用加载电机和联轴器,仅需使用驱动器既可以实现控制,因此,降低了标定所需的成本。
30、此外,由于无需使用加载电机、联轴器等器件,因此,整个标定的过程摆脱了待测的伺服电机、加载电机、联轴器之间对同轴度的要求,也无需考虑待测的伺服电机与加载电机之间因轴径不同,而额外需要匹配对应的对托平台,降低了标定的复杂程度。
31、在上述技术方案中,通过控制伺服电机以力矩模式运行,以便在力矩模式下,伺服电机进行运转,并使得电机的转速升高至目标转速,而在伺服电机运转过程中,其自身会产生热量,自身的温度会升高。其中,由于伺服电机的温升值是用于衡量可持续工作范围的指标。因此,通过获取自伺服电机驱动后伺服电机的温度值,以及确定伺服电机的转速达到目标转速后,伺服电机的温度值,进而知悉伺服电机的温升值。
32、若伺服电机的温升值达到温升指标的情况下,认为当前伺服电机的设定参数是该目标转速下的标定参数,进而实现可持续工作范围中目标转速的标定,通过遍历可运行转速区间中的所有的目标转速,即可实现可持续工作范围的标定。
33、另外,本技术提出的伺服电机的标定装置还具有以下附加技术特征。
34、在上述技术方案中,每一设定参数包括第一参数和第二参数,第一参数和第二参数的绝对值相同,标定单元,具体用于:获取伺服电机的转速;根据伺服电机的转速重复以下控制步骤,直至伺服电机的温升值的波动小于预设值;基于伺服电机的温升值未达到温升指标,增大设定参数,直至增大后的设定参数对应的温升值达到温升指标;控制步骤包括:基于伺服电机的转速增加到目标转速,控制伺服电机以第一参数运行;基于伺服电机的转速降低到目标转速,控制伺服电机以第二参数运行。
35、在上述任一技术方案中,设定参数包括:扭矩或电流。
36、在该技术方案中,通过限定设定参数由第一参数以及第二参数的绝对值相同,以便在获取得到伺服电机的转速后,根据伺服电机的转速动态选择第一参数运行还是第二参数运行,在此过程中,可以使得伺服电机的转速稳定在目标转速的附近,进而满足可持续工作范围在标定过程中,对伺服电机的转速的要求。
37、此外,第一参数的绝对值和第二参数的绝对值相同,以便设定参数能够满足可持续工作范围在标定过程中对其的要求,以便在相同的工况下控制伺服电机的运行。
38、在上述技术方案中,通过限定在伺服电机的转速降低到目标转速或增加到目标转速时,以不同的参数进行工作,以便模拟在同一转速下的稳定工作的使用状态。
39、在上述技术方案中,通过获取伺服电机的温度值,以便根据伺服电机的温度值来确定温升值,进而根据温升值的波动情况来确定伺服电机的温升值是否趋于稳定,以便在伺服电机的温升值趋于稳定的情况下,判断是否达到温升指标,从而确定当前的设定参数是否为目标转速对应的标定参数。
40、在上述技术方案中,考虑到在目标转速下的设定参数过小,伺服电机的温升值一直无法达到温升指标,此时,则认为当前的设定参数不适合作为可持续工作范围,通过增大设定参数,以便重新对目标转速下更新的设定参数是否可以作为可持续工作范围进行判断,直到找到合适的设定参数。
41、在该技术方案中,通过判断伺服电机的温升值与温升指标之间的关系,以及增大设定参数,提高了确定得到的可持续工作范围的准确性。
42、在上述任一技术方案中,标定单元,还用于:基于伺服电机的温升值大于温升指标,降低设定参数。
43、在该技术方案中,通常情况下,温升指标是伺服电机的最大温升值,当伺服电机的温升值超过最大温升值的情况下,认为伺服电机存在过载以及过热的情况,若一直保持当前状态,伺服电机极易出现烧毁。
44、为了避免上述情况的出现,本技术的技术方案具体限定了在检测到温升值超过最大温升值的情况下,降低设定参数,以便降低伺服电机的发热量,从而降低其出现烧毁的几率,以便起到了保护伺服电机的作用。
45、在上述任一技术方案中,获取单元,还用于:获取伺服电机所处环境的环境温度;根据环境温度确定温升指标。
46、在该技术方案中,考虑到伺服电机所处的环境不同,伺服电机散热的能力也不一样,对可持续工作范围也会产生影响,因此,通过获取环境温度,以便根据环境温度来选取对应的温升指标,从而提高了可持续工作范围判定的准确性。
47、在其中一个技术方案中,可以预先构建环境温度与温升指标之间的对应关系,以便在确定环境温度之后,可以根据对应关系直接确定温升指标。
48、在上述任一技术方案中,标定单元,还用于:根据每一个目标转速对应的标定参数得到可持续工作范围的示意图。
49、在该技术方案中,通过得到可持续工作范围的示意图,以便用户直接使用,进而选择合理的设定参数控制伺服电机运行。
50、本发明的第三方面提供了一种伺服电机的标定装置,包括:控制器和存储器,其中,存储器中存储有程序或指令,控制器在执行存储器中的程序或指令时实现如第一方面中任一项方法的步骤。
51、本发明的第四方面提供了一种可读存储介质,可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如第一方面中任一项方法的步骤。
52、本发明的第五方面提供了一种机器人,机器人包括伺服电机,机器人包括:如第二方面或第三方面任一项的伺服电机的标定装置;和/或如第四方面的可读存储介质。
53、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!