基于DSVM的SMPMSM驱动系统双目标全局最优无模型预测控制方法
基于dsvm的smpmsm驱动系统双目标全局最优无模型预测控制方法
技术领域
1.本发明涉及smpmsm驱动系统技术领域,尤其是一种基于dsvm的smpmsm驱动系统双目标全局最优无模型预测控制方法。
背景技术:
2.永磁同步电机(permanent magnet synchronous motor,pmsm)具有高效率、高功率密度和低维护的优点,被广泛应用于新能源汽车、电梯、空气压缩机等,在实际应用中,为了实现pmsm驱动系统高控制品质运行,亟需突破pmsm驱动系统电机电流及逆变器开关频率双目标优化控制关键技术。
3.模型预测控制(model predictive control,mpc)因其清晰的物理概念、灵活的控制结构、高动态响应,以及在pmsm驱动系统中易于实现而获得了研究关注。mpc可分为连续控制集模型预测控制(ccs-mpc)和有限控制集模型预测控制(finite control set model predictive control,fcs-mpc)。离散空间矢量调制(discrete space vector modulation,dsvm)通过引入虚拟电压矢量扩大了逆变器候选电压矢量数,基于dsvm的fcs-mpc的pmsm驱动系统,可根据系统不同的运行工况自动选择单矢量控制、双矢量控制或三矢量控制,增加了逆变器电压矢量选择的自由度,此外,伴随着逆变器dsvm时间间隔的增加,逆变器电压矢量六边形中的候选电压矢量数量也在增加,进一步减少了pmsm驱动系统稳态运行时的转矩脉动。
4.基于dsvm的smpmsm驱动系统电流控制性能和逆变器开关频率双目标最优的有限控制集模型预测控制,现有方法所获得的逆变器电压矢量可能只是局部最优解,通过枚举所有的逆变器候选电压矢量并使双目标代价函数最小化的枚举法,虽然可以获得全局最优逆变器电压矢量,但需要枚举所有的逆变器候选电压矢量,导致了控制器在线计算负担的增加。此外,系统控制性能敏感依赖于smpmsm驱动系统的建模精度。
技术实现要素:
5.本发明的目的在于提供一种不依赖于smpmsm驱动系统精确建模、无需在线评估所有逆变器电压矢量,能够实时生成电流控制性能与逆变器开关频率双目标全局最优逆变器电压矢量的基于dsvm的smpmsm驱动系统双目标全局最优无模型预测控制方法。为实现上述目的,本发明采用了以下技术方案:一种基于dsvm的smpmsm驱动系统双目标全局最优无模型预测控制方法,该方法包括下列顺序的步骤:
6.(1)建立smpmsm驱动系统的超局部模型,生成逆变器参考电压矢量
7.(2)根据逆变器参考电压矢量的位置,将逆变器电压六边形分为三个子区域,再将逆变器参考电压矢量所在的子区域定义为其他两个子区域按逆时针顺序分别定义为和
8.(3)分别获取子区域和中电流控制性能最佳的候选电压矢量;
9.(4)生成各个子区域中需要进行在线评估的候选电压矢量并放入候选电压矢量集;
10.(5)对候选电压矢量集中的候选电压矢量进行在线评估,获得全局最优逆变器电压矢量
11.所述步骤(1)具体是指:
12.在dq同步速旋转坐标系下,建立包含电机参数不确定性、逆变器非线性和未知扰动的smpmsm驱动系统数学模型,表示为:
[0013][0014]
式中:id、iq表示d、q轴定子电流,和表示逆变器d、q轴参考电压;n
p
为极对数;ωr为电机机械角速度;rs、ls和分别表示定子电阻、定子电感和永磁体磁链的标称参数;f
ds
和f
qs
表示由电机参数不确定性引起的扰动;v
d,dead
和v
q,dead
表示由逆变器非线性引起的扰动,dd和dq是未知干扰,αd和αq代表逆变器d、q轴参考电压的比例系数;
[0015]
基于无模型控制,建立smpmsm驱动系统的超局部模型:
[0016][0017]
式中:中:
[0018]
fd和fq的估计通过代数参数辨识方法获得,fd和fq的估计表达式为:
[0019][0020]
式中:tf=nfts,nf为窗口长度,ts为采样时间;δ为积分的自变量,ud(δ)和uq(δ)分别表示δ时刻的逆变器d、q轴参考电压,id(δ)和iq(δ)分别表示δ时刻d、q轴的定子采样电流;
[0021]
从第k个采样时刻开始到基于第k个采样时刻数据所计算的逆变器d、q轴参考电压结束,存在两个控制周期的延迟;假设和分别等于和通过对公式(1)进行欧拉离散化和延迟补偿,得到第(k+2)时刻的id和iq的预测值id(k+2)和iq(k+2),表示为:
[0022][0023]
根据无差拍预测控制,d、q轴定子电流在第(k+2)时刻达到参考值根据无差拍预测控制,d、q轴定子电流在第(k+2)时刻达到参考值生成k时刻的逆变器d、q轴参考电压,表示为:
[0024][0025]
然后,通过坐标变换生成逆变器参考电压矢量
[0026]
所述步骤(2)具体是指:
[0027]
根据逆变器参考电压矢量的位置,以逆变器电压六边形中心为原点,按照[0,2π/3]、[2π/3,4π/3]、[4π/3,2π]三个角度范围将逆变器电压六边形分为三个子区域,三个子区域依次定义为z1,z2和z3;
[0028]
由于所生成的的位置不固定,将所在的子区域定义为所在的子区域定义为表示向上取整,其他两个子区域按逆时针顺序分别定义为和
[0029]
所述步骤(3)具体包括以下步骤:
[0030]
(3a)获取子区域中的电流控制性能最优的逆变器候选电压矢量:
[0031]
基于最小距离原则,距离逆变器参考电压矢量最近的逆变器候选电压矢量为电流控制性能最优的候选电压矢量,所述逆变器候选电压矢量包括逆变器基本电压矢量和虚拟电压矢量,子区域被高宽u
dc
/3n的网格进行剖分,每个网格顶点上的两个候选电压矢量定义为的α轴和β轴的表达式为:
[0032][0033]
式中:n为离散空间矢量调制(discrete space vector modulation,dsvm)的时间间隔,u
dc
为逆变器直流母线电压;
[0034]
子区域中的电流控制性能最优的候选电压矢量为中与距离最近的电压矢量,将其定义为且有:
[0035][0036]
(3b)获取子区域和中的电流控制性能最优的候选电压矢量:
[0037]
在和中,距离最近的候选电压矢量分别在与的公共边和与的公共边上,将分别向这两个公共边进行投影,距离投影点最近的候选电压矢量为和中电流控制性能最优的候选电压矢量;当投影点不在公共边上时,电流控制性能最优的候选电压矢量为v0;将和中的电流控制性能最优的候选电压矢量分别定义为和表示为:
[0038][0039][0040]
式中:round表示四舍五入运算;
[0041]
式中,c、d为辅助变量;m1、m2、m3为子区域编号,θ为电机转子位置角。
[0042]
所述步骤(4)具体是指:
[0043]
针对有限控制集无模型预测控制的smpmsm驱动系统,设计包含电流控制性能和逆变器开关频率的双目标代价函数,其可表示为:
[0044][0045]
式中:n代表要评估的逆变器候选电压矢量,en表示其电流误差代价函数值,jn表示其双目标代价函数值,sn(k+2)表示其所对应的逆变器开关数,λ为权重因子;
[0046]
在子区域中,电流控制性能最优的候选电压矢量产生最小的电流误差,若逆变器的候选电压矢量(candidate voltage vector,cvv)的开关次数大于或等于的开关数,那么它的双目标代价函数值就大于因此,只有和逆变器开关次数小于的候选电压矢量被放入至候选电压矢量集,且只需要对候选电压矢量集中的候选电压矢量进行在线评估;采用同样的方法,在子区域和中,及逆变器开关次数少于和的候选电压矢量分别被放入候选电
压矢量集。
[0047]
所述步骤(5)具体是指:将候选电压矢量集中的电压矢量代入所设计的双目标代价函数,双目标代价函数最小值所对应的候选电压矢量为全局最优电压矢量逆变器采用不连续最小值调制策略生成逆变器功率开关器件的通、断信号,实时控制逆变器的运行。
[0048]
由上述技术方案可知,本发明的有益效果为:第一,本发明通过建立smpmsm驱动系统超局部模型,经由无差拍预测控制生成逆变器参考电压矢量再根据的位置将逆变器电压六边形分为三个子区域,并提出了一种获得各个子区域中具有最佳电流控制性能候选电压矢量的方法,克服了系统电流控制性能敏感依赖于系统建模精度的不足;第二,设计包含定子电流误差和逆变器开关次数的双目标代价函数,将每个子区域中电流控制性能最佳的候选电压矢量的逆变器开关次数作为基准,确定出每个子区域中需要进行在线评估的候选电压矢量并放入候选电压矢量集,再基于所设计的双目标代价函数对候选电压矢量集中的候选电压矢量进行在线评估,获得全局最优逆变器电压矢量,避免了在线评估所有候选电压矢量,如实验结果所示,本发明具有在不同权重因子与不同工况下均可确保系统获得全局最优逆变器电压矢量的优点。
附图说明
[0049]
图1为时间间隔为5的dsvm的候选电压向量;
[0050]
图2为提出的子区域划分方法示意图;
[0051]
图3为的划分方法示意图;
[0052]
图4为和中电流控制性能最佳的候选电压矢量示意图;
[0053]
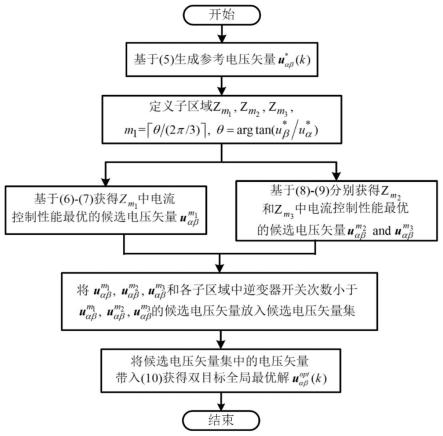
图5为本发明的方法流程图;
[0054]
图6为所提出的smpmsm驱动系统控制结构图;
[0055]
图7为smpmsm转速为100rpm、q轴电流参考值为10a的双目标性能对比示意图;
[0056]
图8为smpmsm转速为100rpm、q轴电流参考值为20a的双目标性能对比示意图;
[0057]
图9为smpmsm转速为500rpm、q轴电流参考值为10a的双目标性能对比示意图;
[0058]
图10为smpmsm转速为500rpm、q轴电流参考值为20a的双目标性能对比示意图;
[0059]
图11为三种控制方法执行时间对比示意图;
[0060]
图12为基于模型的方法和所提出的方法在参数不确定情况下的比较示意图。
具体实施方式
[0061]
如图5所示,一种基于smpmsm驱动系统的双目标全局最优无模型预测控制方法,该方法包括下列顺序的步骤:
[0062]
(1)建立smpmsm驱动系统的超局部模型,生成逆变器参考电压矢量
[0063]
(2)根据逆变器参考电压矢量的位置,将逆变器电压六边形分为三个子区域,再将逆变器参考电压矢量所在的子区域定义为其他两个子区域按逆时针顺序分别定义为和
[0064]
(3)分别获取子区域和中电流控制性能最佳的候选电压矢量;
[0065]
(4)生成各个子区域中需要进行在线评估的候选电压矢量并放入候选电压矢量集;
[0066]
(5)对候选电压矢量集中的候选电压矢量进行在线评估,获得全局最优逆变器电压矢量
[0067]
所述步骤(1)具体是指:
[0068]
在dq同步速旋转坐标系下,建立包含电机参数不确定性、逆变器非线性和未知扰动的smpmsm驱动系统数学模型,表示为:
[0069][0070]
式中:id、iq表示d、q轴定子电流,和表示逆变器d、q轴参考电压;n
p
为极对数;ωr为电机机械角速度;rs、ls和分别表示定子电阻、定子电感和永磁体磁链的标称参数;f
ds
和f
qs
表示由电机参数不确定性引起的扰动;v
d,dead
和v
q,dead
表示由逆变器非线性引起的扰动,dd和dq是未知干扰,αd和αq代表逆变器d、q轴参考电压的比例系数;
[0071]
基于无模型控制,建立smpmsm驱动系统的超局部模型:
[0072][0073]
式中:式中:
[0074]
fd和fq的估计通过代数参数辨识方法获得,fd和fq的估计表达式为:
[0075][0076]
式中:tf=nfts,nf为窗口长度,ts为采样时间;δ为积分的自变量,ud(δ)和uq(δ)分别表示δ时刻的逆变器d、q轴参考电压,id(δ)和iq(δ)分别表示δ时刻d、q轴的定子采样电流;
[0077]
从第k个采样时刻开始到基于第k个采样时刻数据所计算的逆变器d、q轴参考电压结束,存在两个控制周期的延迟;假设和分别等于和通过对公式(1)进行欧拉离散化和延迟补偿,得到第(k+2)时刻的id和iq的预测值id(k+2)和iq(k+2),表示为:
[0078][0079]
根据无差拍预测控制,d、q轴定子电流在第(k+2)时刻达到参考值根据无差拍预测控制,d、q轴定子电流在第(k+2)时刻达到参考值生成k时刻的逆变器d、q轴参考电压,表示为:
[0080][0081]
然后,通过坐标变换生成逆变器参考电压矢量
[0082]
如图2所示,所述步骤(2)具体是指:
[0083]
根据逆变器参考电压矢量的位置,以逆变器电压六边形中心为原点,按照[0,2π/3]、[2π/3,4π/3]、[4π/3,2π]三个角度范围将逆变器电压六边形分为三个子区域,三个子区域依次定义为z1,z2和z3;
[0084]
由于所生成的的位置不固定,将所在的子区域定义为所在的子区域定义为表示向上取整,其他两个子区域按逆时针顺序分别定义为和
[0085]
所述步骤(3)具体包括以下步骤:
[0086]
(3a)获取子区域中的电流控制性能最优的逆变器候选电压矢量:
[0087]
如图3所示,基于最小距离原则,距离逆变器参考电压矢量最近的逆变器候选电压矢量为电流控制性能最优的候选电压矢量,所述逆变器候选电压矢量包括逆变器基本电压矢量和虚拟电压矢量,子区域被高宽u
dc
/3n的网格进行剖分,每个网格顶点上的两个候选电压矢量定义为矢量定义为的α轴和β轴的表达式为:
[0088][0089]
式中:n为离散空间矢量调制(discrete space vector modulation,dsvm)的时间间隔,u
dc
为逆变器直流母线电压;
[0090]
子区域中的电流控制性能最优的候选电压矢量为中与距离最近的电压矢量,如图3所示,将其定义为且有:
[0091][0092]
(3b)获取子区域和中的电流控制性能最优的候选电压矢量:
[0093]
如图4所示,在和中,距离最近的候选电压矢量分别在与的公共边和与的公共边上,将分别向这两个公共边进行投影,距离投影点最近的候选电压矢量为和中电流控制性能最优的候选电压矢量;当投影点不在公共边上时,电流控制性能最优的候选电压矢量为v0;将和中的电流控制性能最优的候选电压矢量分别定义为和如图4所示,表示为:
[0094][0095][0096]
式中:round表示四舍五入运算;
[0097]
式中,c、d为辅助变量;m1、m2、m3为子区域编号,θ为电机转子位置角。
[0098]
所述步骤(4)具体是指:
[0099]
针对有限控制集无模型预测控制的smpmsm驱动系统,设计包含电流控制性能和逆变器开关频率的双目标代价函数,其可表示为:
[0100][0101]
式中:n代表要评估的逆变器候选电压矢量,en表示其电流误差代价函数值,jn表示其双目标代价函数值,sn(k+2)表示其所对应的逆变器开关数,λ为权重因子;
[0102]
在子区域中,电流控制性能最优的候选电压矢量产生最小的电流误差,若逆变器的候选电压矢量(candidate voltage vector,cvv)的开关次数大于或等于的开关数,那么它的双目标代价函数值就大于因此,只有和逆变器开关次数小于的候选电压矢量被放入至候选电压矢量集,且只需要对候选电压矢量集中的候选电压矢量进行在线评估;采用同样的方法,在子区域和中,及逆变器开关次数少于和的候选电压矢量分别被放入候选电
压矢量集。
[0103]
所述步骤(5)具体是指:将候选电压矢量集中的电压矢量代入所设计的双目标代价函数,双目标代价函数最小值所对应的候选电压矢量为全局最优逆变器电压矢量逆变器采用不连续最小值调制策略生成逆变器功率开关器件的通、断信号,实时控制逆变器的运行。
[0104]
以下结合图1至图12对本发明作进一步的说明。
[0105]
对于dsvm,虚拟电压矢量可以通过在控制周期内施加若干电压矢量进行合成。针对三相两电平电压源型逆变器,当dsvm的时间间隔为5时,候选电压矢量如图1中圆点所示。
[0106]
在逆变器电压六边形中,存在开关次数相同的逆变器电压矢量,如图1中灰色圆点所示,如果将这些电压矢量带入式(10)进行评估,只能获得电流控制性能最优的电压矢量,双目标优化控制退化为单电流目标的优化控制。因此,被灰色圆点包围的区域为定子电流与逆变器开关频率双目标无效优化区域,如图1中的灰色区域所示。传统的基于dsvm的双目标fcs-mpc只评估周围的三个候选电压矢量,将其称之为三候选电压矢量方法,若处于无效优化区域,如图1中的位于下方的三角形所示,代价函数只能选择电流控制性能最优的候选电压矢量,无法减少逆变器的开关次数,即无法降低逆变器的开关频率。此外,传统的基于dsvm的双目标fcs-mpc,基于smpmsm驱动系统数学模型来生成再选择周围的候选电压矢量进行评估。然而,实际系统中的电机参数不确定、逆变器非线性和未知扰动影响了的准确生成和周围候选电压矢量的选择。因此,传统的基于dsvm的双目标fcs-mpc无法确保获得双目标优化的全局最优逆变器电压矢量,且存在系统控制性能敏感依赖于系统建模精度的不足。
[0107]
所提出的smpmsm驱动系统的控制结构图如图6所示,三相电流传感器与旋转编码器实时采集电流ia(k)、ib(k)、ic(k)与转子位置角θ,经由坐标变换获得dq轴采样电流i
dq
(k)和参考电压基于采样电流i
dq
(k)和参考电压对参数不确定、逆变器非线性与位置扰动进行估计获得并对采样电流进行延时补偿获得k+2时刻dq轴电流i
dq
(k+2);将i
dq
(k+2)、i
dq
(k)带入所提出的双目标全局最优无模型预测控制中,获得全局最优逆变器电压矢量逆变器采用不连续最小值pwm调制策略生成逆变器功率开关器件的通、断信号,实时控制逆变器的运行。
[0108]
在线评估所有候选电压矢量方法可以获得全局最优解和最小的代价函数值。因此,将在线评估所有候选电压矢量方法的代价函数值作为基准值,若所提出方法与三候选电压矢量方法所获得的代价函数值大于基准值,则获得的是次优解。反之,若所提出方法与三候选电压矢量方法所获得的代价函数值等于基准值,则获得了全局最优解。
[0109]
设置smpmsm驱动系统的转速为100rpm,d轴参考电流为0a,q轴参考电流分别为10a和20a时,在线评估所有候选电压矢量方法和三候选电压矢量方法的双目标控制性能对比如图7和图8所示。
[0110]
当权重因子为0.05时,三候选电压矢量方法和所提出方法具有相似的dq轴电流纹
波、相电流thd和逆变器开关频率,但三候选电压矢量方法选择了少量次优电压矢量。此外,随着权重因子的增加,三候选电压矢量方法的次优电压矢量的比例也明显增加。此外,逆变器开关频率无法随着权重因子的增加而降低。相比之下,本发明所提出的方法在不同的权重因子条件下均可获得双目标全局最优电压矢量,以a相电流thd的轻微增加为代价,显著降低了逆变器的开关频率。此外,本发明所提出方法保留了权重因子的双目标折中作用,允许设计者根据实际需求调整电流控制性能和逆变器开关频率。
[0111]
设置smpmsm驱动系统转速为100rpm,d轴参考电流为0a,q轴参考电流分别为10a和20a时,在线评估所有候选电压矢量方法和三候选电压矢量方法的双目标控制性能对比如图9和图10所示。
[0112]
当权重因子为0.05时,两种方法均获得了全局最优电压矢量。这是因为在高速时参考电压矢量的轨迹接近电压六边形边界,而三候选电压矢量方法评估的三个电压矢量不在无效的优化区域。然而,随着权重因子的增加,三候选电压矢量方法的逆变器开关频率无法进一步降低,双目标全局最优电压矢量也无法获得。而本发明所提出的方法在不同的权重因子下均可获得全局最优电压矢量,并保证了权重因子的双目标折中功能。
[0113]
图11展示了三种控制方法执行时间的比较。与三候选电压矢量方法相比,本发明提出的方法的执行时间略有增加,但明显低于评估所有候选电压矢量方法的执行时间。
[0114]
为了验证所提方法的鲁棒性,对基于模型的方法和本发明所提出方法在电机参数变化时进行了电流控制性能对比研究。对于基于模型的方法,采用smpmsm驱动系统数学模型来生成逆变器参考电压矢量并预测电流,其余部分与本发明所提出的方法相同。对于这两种方法,电机参数设定为r=1.4rs,l=1.2ls,其余实验条件与之前的实验相同。
[0115]
设在0.02s时从0a增加到10a,两种方法的dq轴电流如图12所示。在图12中,两种方法在100rpm和400rpm时均拥有快速的动态响应。然而,在稳态工况下,基于模型方法的dq轴电流脉动明显高于所提出的方法。原因是当电机参数变化时,基于模型方法中生成的逆变器参考电压矢量和预测电流并不准确,代价函数无法选择合适的候选电压矢量,导致dq轴电流脉动明显增加。本发明所提出的方法不依赖于smpmsm驱动系统的精确建模,因此即使在电机参数不确定的情况下,仍然具有良好的动态和稳态控制性能,证实了所提出方法的鲁棒性。
[0116]
综上所述,本发明通过建立smpmsm驱动系统超局部模型,摆脱了对于smpmsm驱动系统精确建模的依赖;基于所建立的smpmsm驱动系统超局部模型,生成逆变器的参考电压矢量再根据的位置将逆变器电压六边形分为三个子区域,并提出了一种获得各个子区域中具有最佳电流控制性能的候选电压矢量;设计包含定子电流误差和逆变器开关次数的双目标代价函数,将每个子区域中电流控制性能最佳的候选电压矢量的逆变器开关次数作为基准,确定出每个子区域中需要进行在线评估的候选电压矢量并放入候选电压矢量集,再基于所设计的双目标代价函数对候选电压矢量集中的候选电压矢量进行在线评估,获得全局最优电压矢量,避免了在线评估所有候选电压矢量。如实验结果所示,本发明具有确保获得全局最优电压矢量、计算负荷小、鲁棒性强的技术优势。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1