一种机械臂关节电机初始位置的检测方法
1.本发明属于电机控制领域,具体涉及一种机械臂关节电机初始位置的检测方法。
背景技术:
2.永磁同步电机与传统电机相比具有无需励磁、体积小、功率密度高等优点,被广泛应用于电动汽车、数控机床及智能机器人等场合。在永磁同步电机的控制当中,通过获取准确的转子初始位置可以避免电机反转、提高启动力矩等,是电机控制中重要的一步。
3.机械臂关节电机在每次断电后转子可能发生转动,当采用增量式编码器作为位置传感器时,在每次上电后,均需要重新确定电机转子的初始位置,而基于增量式位置传感器的初始位置检测方案将使电机转子发生转动,在所述情境下如何一边保证初始位置检测精度,一边减小电机转子在启动定位过程中转动的幅值,使电机转子处于准静止状态是需要解决的问题之一。
技术实现要素:
4.技术问题:为解决机械臂关节电机断电重启后,利用增量式编码器进行初始位置检测难度大这一问题,本发明提供一种机械臂关节电机初始位置的检测方法。
5.本发明有着无需在关节电机输出轴上额外安装位置传感器;检测算法实现简单;检测精度不受电机凸极性的影响的优点。
6.技术方案:为实现上述目的,本发明采用的技术方案如下:一种机械臂关节电机初始位置的检测方法,包括以下步骤:机械臂关节电机减速器的输出轴上安装有位置传感器,电机控制驱动器控制机械臂关节电机减速器的输出轴转动,位置传感器通过捕获所述输出轴的转动输出位置信号,基于所述位置信号的占空比,利用位置式pi控制器、增量式pi控制器和电流脉冲信号进行机械臂关节电机的初始位置检测,所述检测方法包括以下步骤:步骤s1:随机选择d轴建立dq坐标系,向四个矢量角方向注入基本电流脉冲信号,根据每个矢量角对应的位置信号的占空比的大小更新d轴位置,获得更新后的d轴;步骤s1-1,随机选择d轴建立dq坐标系,在所述dq坐标系下,依次选择四个矢量角,;步骤s1-2,向所述矢量角注入基本电流脉冲信号,获得在每个矢量角下注入基本电流脉冲信号后的位置信号的占空比,其中,的定义如下:
,式中,是d轴初始电流值;是基本电流脉冲信号的周期;步骤s1-3,更新d轴位置为,,式中,为取得最大占空比时对应的矢量角,为最大占空比;为标准符号函数,定义为;步骤s2:向所述更新后的d轴注入第一电流脉冲信号,位置式pi控制器通过测算位置信号的占空比进行反馈控制,控制机械臂关节电机减速器的输出轴向最近的位置传感器的最小分辨率刻度移动,使得位置信号占空比的绝对值增大并最终稳定在第一预定数值;步骤s2-1,连续向所述更新后的d轴注入第一电流脉冲信号,获得注入第一电流脉冲信号后的位置信号的占空比,其中,被定义为,式中,为计算第一电流脉冲信号所需的时移量;步骤s2-2,位置式pi控制器将占空比作为反馈量进行闭环控制,位置式pi控制器输出计算第一电流脉冲信号所需的时移量,使占空比稳定在第一预定数值;步骤s3:切换位置式pi控制器为增量式pi控制器,实现对所述更新后的d轴位置与电机转子实际位置间的偏移量的估计;步骤s3-1,切除位置式pi控制器并投入增量式pi控制器,将所述注入第一电流脉冲信号切换为第二电流脉冲信号,其中被定义为;步骤s3-2,增量式pi控制器将占空比作为反馈量进行闭环控制,输出d轴位置与电机转子实际位置间的偏移量的估计,直至占空比稳定在第二预定数值,完成对电机转子初始位置的检测。
7.所述四个矢量角依次相差90
°
;其一为随机选择的矢量角,另三个矢量角则与随机选择的矢量角分别相差90
°
、180
°
、270
°
。
8.所述基本电流脉冲信号被设计成正负脉冲信号,电流在电机转子上产生的平均转矩与平均转动角度均为0,不改变电机转子静态时的位置。
9.所述初始位置检测,在检测前,所述步骤s1-2中的d轴初始电流值与基本电流
脉冲信号的周期可通过关系式估算获得多个参考数值对《
ꢀꢀ
》,式中,j为电机和负载的组合转动惯量;为机械臂关节电机减速器的传动比;为位置传感器的分辨率;为所述电机的永磁体的极对数;为永磁体磁链。
10.所述位置信号,是因机械臂关节电机减速器输出轴在所述位置传感器的最小分辨率刻度附近的抖动,被位置传感器捕获而形成的方波类型的跳变信号;根据电机不同运动方向,所述方波类型的跳变信号的值域为{x,x+1}或{x,x-1},其中,x为位置传感器的初始检测值;x+1或x-1在所述方波类型的跳变信号中所占比例被定义为位置信号的占空比;当所述方波类型的跳变信号取值为x+1时,定义为占空比的正方向,此时占空比取正值;当所述方波类型的跳变信号取值为x-1时,定义此时的占空比为负方向,取负值。
11.所述步骤s2-2中,所述输出计算第一电流脉冲信号所需的时移量,将限幅于。
12.所述步骤s2-2中,第一预定数值有,默认取0.05;所述位置式pi控制器的控制偏差为,其中,为位置信号的占空比;随着机械臂关节电机减速器的输出轴不断地向最近的位置传感器的最小分辨率刻度移动,所述位置式pi控制器的控制偏差不断减小,位置信号的占空比的绝对值最终将稳定在第一预定数值。
13.所述步骤s3-2中, 第k次迭代时输出d轴位置与电机转子实际位置间的偏移量的估计,更新d轴位置为;所述增量式pi控制器输出的积分将被限幅于,省去对电机转子进行磁极检测的操作。
14.所述步骤s3-2中,第二预定数值有,默认取0.05;所述增量式pi控制器的控制偏差为,其中,为位置信号的占空比;当位置信号的占空比接近时,第二电流脉冲信号所引起的电机转子转动幅值近似于位置传感器滞回特性的区间大小。
15.所述增量式pi控制器采用变系数的方法,将控制系数以指数方式进行放大或缩小,以满足位置检测的精度要求。
16.有益效果:本发明有益效果体现在如下方面:(a)本发明属于一种静止型的电机转子初始位置检测方法,通过限制电机转子最大转动角度小于2倍的位置传感器分辨率大小,保证电机转子处于准静态下,完成对电机转子初始位置的检测。
17.(b)相较于常规方法,本发明是基于位置信号占空比的电机转子初始位置检测方法,该方法不依赖电机的凸极性,而且检测精度不受凸极性的影响。
18.(c)本发明通过更新初始随机选择的dq坐标系,对电机转子初始位置的估计值做了初步的限定,保证了后续的检测过程中,控制器将只能收敛到正确的转子磁极方向,无需
再对转子磁极进行判别,简化了检测过程。
附图说明
19.图1为电机初始位置检测方法的流程图;图2为四个随机矢量角与d轴初始位置的示意图;图3为位置式pi控制器与增量式pi控制器的示意图。
20.图中包括:电流脉冲信号10、位置式pi控制器20、增量式pi控制器30、电机控制驱动器40、机械臂关节电机减速器50、位置传感器60。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。
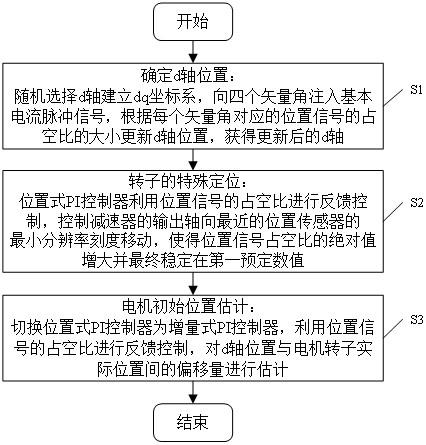
22.如图1所示,本发明实施例的机械臂关节电机初始位置的检测方法,包括以下步骤:s1:确定d轴位置:随机选择d轴建立dq坐标系,向四个矢量角方向注入基本电流脉冲信号,根据每个矢量角对应的位置信号的占空比的大小更新d轴位置。
23.步骤s1具体包括:(1)随机选择d轴建立dq坐标系,在所述dq坐标系下,依次选择四个矢量角 (n=1,2,3,4);(2)向所述矢量角注入基本电流脉冲信号,获得在每个矢量角下注入基本电流脉冲信号后的位置信号的占空比,其中,的定义如下:,式中,是d轴初始电流值;是基本电流脉冲信号的周期;(3)更新d轴位置为,,式中,为取得最大占空比时对应的矢量角,为最大占空比;为标准符号函数,被定义为;图2所示为步骤s1执行前后,dq坐标系下所述四个矢量角与电机转子间的位置关系,为随机选择的矢量角,四个矢量角对应四个方向,满足依次相差90
°
的关系。分别向四个矢量角注入基本电流脉冲信号,以图2为例,假定转子实际位置
与d轴重合,考虑编码器输出轴初始位置的随机性,将在、其中一个矢量角下将获得最大占空比,根据计算公式,可得,在下获得最大占空比时,更新d轴初始位置为;在下获得最大占空比时,更新d轴初始位置为。
24.在一个具体实施例中,根据公式估算选取一对《
ꢀꢀ
》为《10a, 0.01s》。通过使用stm32f407微控制单元的边沿检测功能,记录位置信号的跳变边沿,再根据基本电流脉冲信号的周期,可计算出位置信号的占空比。
25.s2:转子的特殊定位:位置式pi控制器利用位置信号的占空比进行反馈控制,控制机械臂关节电机减速器的输出轴向最近的位置传感器的最小分辨率刻度移动,使得位置信号占空比的绝对值增大并最终稳定在第一预定数值。
26.步骤s2具体包括:(1)连续向所述更新后的d轴注入第一电流脉冲信号,获得注入第一电流脉冲信号后的位置信号的占空比,其中,被定义为,式中,为计算第一电流脉冲信号所需的时移量;(2)位置式pi控制器将占空比作为反馈量进行闭环控制,位置式pi控制器输出计算第一电流脉冲信号所需的时移量,使占空比稳定在第一预定数值;如图3所示包括:电流脉冲信号10、位置式pi控制器20、增量式pi控制器30、电机控制驱动器40、机械臂关节电机减速器50、位置传感器60;位置式pi控制器工作时,增量式pi控制器将不被接入初始位置检测系统中,位置式pi控制器通过输出计算第一电流脉冲信号所需的时移量,控制第一电流脉冲信号在电机转子上产生的不为0的平均转矩,进而控制机械臂关节电机减速器的输出轴向最近的位置传感器的最小分辨率刻度移动,使得位置信号占空比的绝对值增大并最终稳定在第一预定数值,在一个实施例中第一预定数值设置为0.95。
27.s3:电机初始位置估计:切换位置式pi控制器为增量式pi控制器,利用位置信号的占空比进行反馈控制,对d轴位置与电机转子实际位置间的偏移量进行估计。
28.步骤s3具体包括:(1)切除位置式pi控制器并投入增量式pi控制器,将所述注入的第一电流脉冲信号切换为第二电流脉冲信号,其中被定义为;(2)增量式pi控制器将占空比作为反馈量进行闭环控制,输出d轴位置与电机转子实际位置间的偏移量的估计,直至占空比稳定在第二预定数值,完成对电机转子初始位置的检测。
29.如图3所示,增量式pi控制器输出d轴与电机转子实际位置间的偏移量的估计
。在执行完步骤s1后,d轴初始位置与电机转子实际位置间的偏移量,因此,对增量式pi控制器输出的积分值有,在一个实施例中第二预定数值设置为0.5。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1