一种永磁同步电机高效比例积分控制方法
1.本发明属于永磁同步电机控制技术领域,具体涉及一种高效比例积分控制方法。
背景技术:
2.随着伺服电机在工业上的广泛应用,伺服电机对速度控制的稳定性和抗干扰能力要求越来越高,因而出现了一些涉及电机本体结构优化和控制策略的研究。在传统的永磁同步电机(permanent magnet synchronous motor,pmsm)转速控制中,最常使用的双闭环串级控制,外环为速度环,内环为电流环。传统的级联线性控制器如pi矢量控制,为了避免出现过大的超调,需要对其内外环的带宽进行必要的限制,使其相互匹配,由于其级联结构,存在比例积分参数整定工作和低动态响应的问题。为了解决上述问题,研究学者通过提出新的控制结构及控制方法等手段对控制性能进行改善。如韩京清将积分器串联型作为反馈系统的标准型,将过程简单地看成是积分器的串联,通过一种过程的“简单建模”,在此基础上提出了不依赖准确模型的自抗扰控制技术(adrc)。
3.尽管adrc得到了广泛应用,但是在高阶过程的控制上,基本二阶线性自抗扰技术(ladrc)与一些高性能pid控制器的区别不大,一阶ladrc与pi控制器基本没有区别。因为该方法没有发现常规积分器(conventional integrator,ci)存在跟踪常值扰动的效率不高的问题。
4.因此,如何提高伺服电机pi控制积分效率的问题有待解决。
技术实现要素:
5.针对背景技术所存在的问题,本发明基于高效pi的控制方式,改进了传统pi控制,提高了算法的抗干扰能力,提高了矢量控制的鲁棒性。
6.为实现上述目的,如图3所示为控制结构框图,本发明的技术方案如下:
7.1近似滑动窗口滤波器的构造:基于z-n法则模型,分离出一种滑动窗口滤波器,并将其工程化找出一种近似滑动窗口滤波器对其进行近似;
8.2高效积分器的构造:根据常规积分器的构造方法,用近似滑动窗口滤波器替换其中的一节滤波器,得到一种高效积分器;
9.3双闭环系统模型:把高效比例积分控制应用于双闭环伺服电机控制模型中;
10.4仿真实验:比较得到的高效pi控制器与传统pi控制器的优势;
11.本发明的机理为:用一个高效积分器替换常规积分器,组合成高效pi控制器,将该控制器应用到伺服电机转速环,提高抗干扰能力。
12.本发明的机理为:基于常规积分器的构造方法,改变其中模型得到一种新型积分器并应用于伺服电机矢量控制。
附图说明
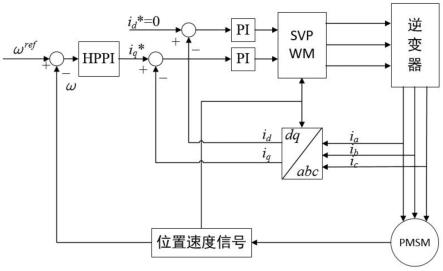
13.图1为高效pi矢量控制的结构框图。
14.图2为积分环节构造框图。
15.图3为电流环等效后的传递函数框图。
16.图4为高效pi传递函数结构框图。
17.图5为应用两种控制算法的系统开环bode图。
18.图6为两种控制算法的bode图。
19.图7为阶跃响应曲线图。
20.图8为矢量模型下的阶跃响应曲线图。
具体实施方式
21.为使本发明的目的、技术方案和优点更加清楚,下面结合实施方式和附图,对本发明作进一步地详细描述。
22.参数定义及说明:ts为采样周期;ld,lq、id,iq、与ud,uq为定子dq轴上的磁链、电流、磁通施加的电压;ωe为电机的电角速度,ωm为电机的机械角速度,且ωe=n
p
·
ωm;te,t
l
分别为电机的电磁转矩和负载转矩;n
p
是磁极对数,ψf为永磁体的磁链,j为转动惯量,bm为粘性摩擦系数,r为定子电阻。e为转速预测误差。
23.永磁同步电机高效比例积分矢量速度控制的控制框图如图1所示,该控制框图主要包括:转速环高效比例积分控制器、电流环常规比例积分控制器、永磁同步电机运动参数的测量和转换、svpwm、逆变器。
24.【电机方程】
25.d-q坐标系下永磁同步电机广义机械方程:
[0026][0027][0028]
te=1.5n
p
(ψdi
q-ψqid)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0029][0030]
【近似滑动窗口滤波器的构造】
[0031]
提高伺服电机pi控制积分效率的方法,来源于pi参数整定的一种方法,即z-n法则。写出z-n法则的模型z-n:m(s),为
[0032][0033][0034]
其中,k
z-n
为过程增益,τ
z-n
为过程滞后时间常数,swf(s)为滑动窗口滤波器模型,如式(6)所示,滑动窗口滤波器swf和一阶惯性滤波器(first order inertial filter,foif)有某种类似,具有典型的低通滤波特性,可以采用一阶惯性系统取代z-n:m中的swf,
但是foif与swf的性质完全不同,在swf中,纯滞后环节的泰勒级数展开式为
[0035][0036]
swf是一种s项阶次无穷大系统或者无穷阶系统,因此swf不能简单用foif近似。
[0037][0038]
由于swf不具有普遍的适用性,所以需要对swf进行工程改造,而改造swf的关键问题就是找到近似swf的方法,一种惯性组合滤波器,能够比较理想地近似swf,这就是近似滑动窗口滤波器aswf。
[0039][0040]
其中aswf(s)、t
aswf
、n
aswf
分别为aswf的传递函数、近似滑动窗时间长度和整数阶次。在实际应用中,n
aswf
值取8已经足够实现较好的近似。
[0041]
【高效积分器的构造】
[0042]
如图2所示常规滤波器ci可以通过一阶惯性滤波器foif构造,通过相似的方法采用aswf构造hei。
[0043][0044]
hei具有比ci更高的输出效率,采用hei构造的hppi具有较高的性能,hppi为:
[0045]
hppi(s)=k
hppi
[1+hei(s)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0046]
【双闭环系统模型】
[0047]
当采用的矢量控制策略时,可近似认为pmsm的交直轴电流完全解耦,永磁同步电机可以等效为一个直流电机。通常,在双闭环伺服系统中,电流环的带宽远大于转速环带宽,因此可对作为内环的采用pi控制的电流环进行降阶近似处理,将二阶环节近似为一阶惯性环节作为电流环在输入作用下的闭环函数:
[0048][0049]
用电流环的一阶惯性等效环节替换后,整个转速闭环系统的动态结构框图如图3所示。
[0050]ki
为电流环开环增益,而近似的条件为转速环开环频率特性的截止频率ω
cs
满足
[0051]
忽略粘滞摩擦系数bm的影响,asr用高效比例积分器替换。结构框图再次等效为图4。t
os
为转速反馈滤波时间常数。k1=k/j为机械增益,t
∑s
=t
os
+1/ki小惯性群近似得到惯性环节的时间常数,近似条件为ω
cs
满足
[0052]
【仿真实验】
[0053]
仿真参数如下所示:极对数n
p
=4,永磁链ψf=0.016wb,d-q轴电感ld=0.0975mh,lq=0.1343mh转动惯量j=0.0001kgm2,粘滞系数bm=0.0008kgm/s2,采样时间ts=10μs,dc总线电压v
dc
=24v,参考转速n
ref
=1000rpm,参考转速ω
ref
=n
ref
·
(π/30)rad/s。
[0054]
以下仿真实验均在近似滑动窗口滤波器整数阶次n
aswf
=8,初始负载转矩给定t
l
=0n
·
m,转速给定初始n
ref
=1000rpm的条件下,在0.2s增加负载t
l
=2.5n
·
m下进行。
[0055]
1传递函数模型下,可以作出应用了两种控制算法的系统整体开环bode图,如图5所示,在k
p
和ti取相同值时,可以看出hppi算法的积分增益要高于pi算法,再分别作出两种控制算法的bode图,如图6所示,经过计算,当n
aswf
=8时,hppi积分增益的效果约为pi的1.78倍。
[0056]
2传递函数模型下,取比例增益k
pi
=k
hppi
=0.123,积分时间系数t
pi
=t
hei
=1/227,为相同系数值时,得两种算法的阶跃响应曲线,如图7所示,由于hppi积分效果的增强,在启动时,比传统pi超调量较大,但响应速度更快,在扰动作用下,hppi的恢复时间也比传统pi更短,抗干扰能力更强。
[0057]
3将上述控制过程应用到矢量控制模型中,得到阶跃响应曲线如图8所示,结果符合传递函数模型的推理。
[0058]
综上,本发明提出了一种高效pi控制方法。该方案基于常规积分器的构造方法,改变其构造方式中的部分模型,得到了一种新型积分器,增强了积分器的增益效果,将此高效积分器替换常规积分器,增强了抗干扰能力和稳定性,最终实现了永磁同步电机高效pi的控制。
[0059]
以上所述,仅为本发明的具体实施方式,本说明书中所公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换;所公开的所有特征、或所有方法或过程中的步骤,除了互相排斥的特征或步骤以外,均可以任何方式组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1