一种集成式模块化六自由度磁悬浮平面运动装置
1.本发明涉及一种六自由度磁悬浮平面运动装置,属于磁悬浮平面电机技术领域。
背景技术:
2.近年来,随着科学技术的迅速发展,微机电系统加工制造和超精密测量等产业对加工对象的特征精度进入纳米尺度,对仪器和制造装备的运动精度和加工效率等方面的要求成倍增加。在这些领域中,多自由度超精密定位装置作为这些领域的核心组成部件,对其结构形式、运动行程、速度、加速度和定位精度都提出了越来越高的要求。
3.传统运动定位装置存在着大行程与高精度难以兼顾的弊端。传统的定位工作平台通过导轨叠加组成,其结构重、体积大,且由于机械摩擦存在,难以获得高的运动性能。对于精密运动系统,则通常使用气浮、磁悬浮等方式来减少摩擦,提高运动精度和速度,相对气浮而言,磁悬浮运动通过控制电机线圈阵列电流,进而控制动子台体悬浮于定子线圈阵列上运动。由于磁悬浮方式无接触、无摩擦与无磨损,无需机械导轨,可极大简化运动结构与大幅减轻运动质量,并且还可满足新一代超精密仪器装备所要求的真空环境,由此实现高速、高加速度的精密运动。
4.专利cn 109962646 b提出了一种通过多个一维磁悬浮运动执行器组合实现六自由度的运动的磁悬浮平面电机,通过借助磁悬浮运动执行器四周的传感器测量单元实现位置测量。其不足之处在于:受其结构形式的影响,该磁悬浮平面电机难以进行扩展应用,极大限制应用范围,并且只能对单一载荷动子实现六自由度运动控制。
5.专利cn 112398304 b提出了一种模块化动铁式六自由度磁浮运动平台,包括基座、磁浮平面电机模块和体感控制器,可实现水平面内沿x方向、沿y方向和绕z轴旋转。其不足之处在于:平台进行六自由运动时,需要通过借助外部体感控制器上的高速镜头拍摄平面电机动子的红外标记点获取平面电机动子的空间六自由度位姿信息,操作和结构相对复杂,并且不具备多个平面电机动子的身份标识和识别功能。
技术实现要素:
6.本发明为解决现有六自由度磁悬浮平台无法实现对单个或多个载荷动子身份识别和六自由度精密运动控制的问题,进而提出一种集成式模块化六自由度磁悬浮平面运动装置。
7.本发明为解决上述问题采取的技术方案是:本发明包括单元本体结构、6d位移测量单元、电机驱动单元、通信温度测量单元和6d运动控制系统;所述6d位移测量单元、所述电机驱动单元、所述通信温度测量单元和所述6d运动控制系统由上至下依次安装在所述单元本体结构内。
8.进一步的,所述单元本体结构包括动子顶板、动子永磁阵列、定子线圈、线圈固定架、多个固定架增高件和定子基座;动子顶板、动子永磁阵列和定子线圈由上至下依次叠加,定子线圈安装在线圈固定架上,线圈固定架的下表面通过多个固定架增高件与定子基
座的上表面连接,所述6d位移测量单元设置在定子线圈的下表面与线圈固定架的上表面之间,所述电机驱动单元、所述通信温度测量单元和所述6d运动控制系统由上至下依次设置在线圈固定架的下表面与定子基座的上表面之间。
9.进一步的,所述6d位移测量单元包括6d传感器测量板和多个板卡固定柱;多个板卡固定柱均布设置在线圈固定架的上表面,6d传感器测量板安装在多个板卡固定柱上。
10.进一步的,所述电机驱动单元包括散热片、x轴驱动板和y轴驱动板;x轴驱动板和y轴驱动板由上至下依次套装在多个固定架增高件上,散热片设置在x轴驱动板的上表面与线圈固定架的下表面之间。
11.进一步的,所述通信温度测量单元包括通信温度测量板,所述6d运动控制系统包括6d运动控制板,通信温度测量板和6d运动控制板由上至下依次叠加设置在y轴驱动板的下表面与定子基座的上表面之间。
12.进一步的,动子永磁阵列由4
×
n组一维永磁阵列装配组成,其中n≥1。
13.进一步的,6d传感器测量板上均布设有多个磁性传感器。
14.进一步的,x轴驱动板和y轴驱动板上集成有电机驱动芯片和电流传感器测量芯片,电机驱动芯片用于驱动电机线圈,电流传感器测量芯片用于测量流过线圈的电流。
15.进一步的,通信板集成有实时以太网模块和多路温度采集模块。
16.进一步的,6d运动控制板由运动控制微控制器、数据处理单元、多通道adc模块、多路pwm接口和led状态指示模块组成。
17.本发明的有益效果是:
18.1、本发明可以根据不同载荷要求进行组合拼装,将多个磁浮平面电机装置连接在一起,以扩大运动行程;
19.2、本发明可实现对单个或多个载荷动子的六自由度运动定位控制,具有安装维护方便、响应快和精度高等优点;
20.3、运动平台采用电磁力直接驱动,无机械摩擦,无阻尼,无线缆约束,具有较高的定位精度;
21.4、可实现对单个或多个载荷动子进行六自由度绝对位置检测和身份编码识别,提高位置检测装置的灵活性,节省空间和成本。
附图说明
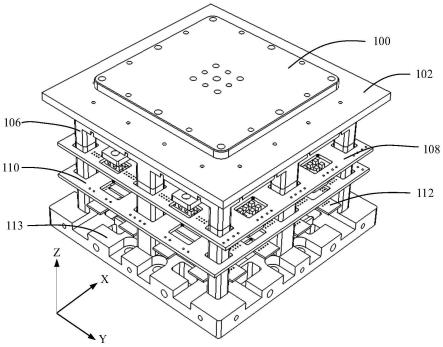
22.图1是本发明的三维结构示意图;
23.图2是本发明的爆炸结构示意图;
24.图3是动子永磁阵列中一维永磁阵列的四种实施例;
25.图4是6d传感器测量板上二维传感器矩阵分布图;
26.图5是本发明的组合扩展示意图;
27.图6是6d运动控制卡的原理框图。
具体实施方式
28.具体实施方式一:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置包括单元本体结构、6d位移测量单元、电机驱动单元、通
信温度测量单元和6d运动控制系统;所述6d位移测量单元、所述电机驱动单元、所述通信温度测量单元和所述6d运动控制系统由上至下依次安装在所述单元本体结构内。
29.具体实施方式二:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置的所述单元本体结构包括动子顶板100、动子永磁阵列101、定子线圈102、线圈固定架106、多个固定架增高件109和定子基座113;动子顶板100、动子永磁阵列101和定子线圈102由上至下依次叠加,定子线圈102安装在线圈固定架106上,线圈固定架106的下表面通过多个固定架增高件109与定子基座113的上表面连接,所述6d位移测量单元设置在定子线圈102的下表面与线圈固定架106的上表面之间,所述电机驱动单元、所述通信温度测量单元和所述6d运动控制系统由上至下依次设置在线圈固定架106的下表面与定子基座113的上表面之间。
30.本实施方式中动子顶板100和动子永磁阵列101组成载荷动子,定子线圈102、线圈固定架106、固定件增高件109和定子基座113组成定子单元本体结构。
31.所述动子顶板100中间区域和四周留有安装孔,可用于安装和固定载荷物件,动子顶板100下方留有安装凹槽,动子永磁阵列101固定于动子顶板100下方的凹槽内。
32.其它组成及连接关系与具体实施方式一相同。
33.具体实施方式三:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置的所述6d位移测量单元包括6d传感器测量板103和多个板卡固定柱105;多个板卡固定柱105均布设置在线圈固定架106的上表面,6d传感器测量板103安装在多个板卡固定柱105上。
34.6d传感器测量板103通过板卡固定柱105固定于线圈固定架106上,通过调整板卡固定柱105的高度,可以调节6d传感器测量板103与动子永磁阵列101之间的间隙,以获得更好的磁场信号。
35.其它组成及连接关系与具体实施方式二相同。
36.具体实施方式四:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置的所述电机驱动单元包括散热片107、x轴驱动板108和y轴驱动板110;x轴驱动板108和y轴驱动板110由上至下依次套装在多个固定架增高件109上,散热片107设置在x轴驱动板108的上表面与线圈固定架106的下表面之间。
37.本实施方式中散热片107优选使用铝制金属散热片或者铜制金属散热片进行散热,为增加散热能力,可在金属散热片上加装风扇进行主动风式散热,或者改用水冷方式进行散热。
38.其它组成及连接关系与具体实施方式二相同。
39.具体实施方式五:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置的所述通信温度测量单元包括通信温度测量板111,所述6d运动控制系统包括6d运动控制板112,通信温度测量板111和6d运动控制板112由上至下依次叠加设置在y轴驱动板110的下表面与定子基座113的上表面之间。
40.所述定子基座上113的四周各留有两个固定孔槽113a和线路孔113b,固定孔槽113a用于在进行组合拼接磁悬浮运动装置时,固定和连接相邻磁悬浮运动装置,线路孔113b用于布置磁悬浮运动装置内的电气信号线路,磁悬浮运动装置内部的电气线路最终通过线路孔113b从定子基座113的底部引出。
41.其它组成及连接关系与具体实施方式二或四相同。
42.具体实施方式六:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置的动子永磁阵列101由4
×
n组一维永磁阵列201装配组成,其中n≥1。
43.通过更改一维永磁阵列201的排序结构形式,可使载荷动子具有不同的身份编号,实现身份标识;
44.一维永磁阵列201的排序结构形式可采用以下任一方案实现:
45.方案一:图3(a)和图3(b)为一维永磁阵列201具有相同身份编号的两种不同实施方式。
46.方案二:图3(c)和图3(d)为一维永磁阵列201具有相同身份编号的另外两种不同实施方式。
47.其中,使用方案一和方案二实施方式的一维永磁阵列201组成的动子永磁阵列101具有不同的身份编号。
48.永磁体具有不同的磁化强度、不同的长度、宽度和高度,永磁体材质优选铷铁硼。
49.所述定子线圈102由x+y(x≥1,y≥1)层分别沿着x轴方向和y轴方向排列的线圈阵列叠加而成,以层叠的方式进行叠加组合构成二维正交线圈,每层线圈阵列使用k(k=3
×
p,p≥2)个方形线圈进行排列而成,定子线圈102通过线圈固定柱105固定于线圈固定架106上。
50.定子线圈102可通过使用印制电路板(printed circuit board)技术制作而成多层层叠绕组式方形线圈,此种方式具有槽满率高的优点,可使磁悬浮运动单元具有较大的推力。
51.其它组成及连接关系与具体实施方式二相同。
52.具体实施方式七:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置的6d传感器测量板103上均布设有多个磁性传感器501。
53.多个磁性传感器501按照一定的网格排列组合构建二维传感器矩阵,磁性传感器501采集动子永磁阵列101的磁场信号,根据磁场信号可对不同结构形式的载荷动子进行身份识别,通过对二维传感器矩阵采集到的磁场信号进行解算,可以计算得出载荷动子在空间中的绝对位置信息。
54.其中,磁性传感器501可选用基于霍尔效应的霍尔传感器或者基于磁阻效应的磁阻传感器,磁性传感器501优选使用可测量空间沿x轴、y轴和z轴三个轴向磁场的三轴磁传感器,可大大减少磁传感器的使用数量,降低成本,磁传感器优选使用型号为tle493d或tmaga5170,传感器内部集成模数转换器和控制器,可将采集到的磁场信号通过i2c总线或spi总线以数字信号的方式进行输出。
55.其它组成及连接关系与具体实施方式三相同。
56.具体实施方式八:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置的x轴驱动板108和y轴驱动板110上集成有电机驱动芯片和电流传感器测量芯片,电机驱动芯片用于驱动电机线圈,电流传感器测量芯片用于测量流过线圈的电流。其它组成及连接关系与具体实施方式四相同。
57.具体实施方式九:结合图1至图6说明本实施方式,本实施方式所述一种集成式模
块化六自由度磁悬浮平面运动装置额通信板111集成有实时以太网模块301和多路温度采集模块302。
58.本实施方式中具有实时通信和温度测量两个功能,通信功能用于完成数据指令的实时交互,温度测量用于对x轴驱动板108、y轴驱动板110和定子线圈102温度的测量,通信板111与6d运动控制板112通过串行总线或并行总线接口进行连接,用于通信数据的处理和交换。实时以太网模块301外接两个网络接口或sfp光纤接口,用于多个磁悬浮平面运动装置进行组合拼接时进行实时以太网通信,两个接口一个用于连接上一个磁悬浮平面运动装置,一个连接下一个磁悬浮平面运动装置,采用串联的拓扑连接方式;所述实时以太网模块301优选使用工业以太网ethercat或powerlink总线协议完成数据信息的实时传。
59.其它组成及连接关系与具体实施方式五相同。
60.具体实施方式十:结合图1至图6说明本实施方式,本实施方式所述一种集成式模块化六自由度磁悬浮平面运动装置的6d运动控制板112由运动控制微控制器401、数据处理单元402、多通道adc模块403、多路pwm接口404和led状态指示模块405组成。
61.所述运动控制微控制器401作为6d运动控制系统的核心,主要完成六自由度精密运动定位控制算法逻辑,为保证控制的实时性,优选具有数字信号处理器(digital signal processor,dsp)的实时微控制器或基于arm的实时微控制器进行实现。
62.所述数据处理单元402主要完成对定子线圈102中电流进行闭环驱动控制,通过并口与多通道adc模块403进行连接,获取多通道adc模块103采集的数据,多通道adc模块403与x轴驱动板108和y轴驱动板110相连,用于采集流过定子线圈102中的电流,所述数据处理单元402内部烧写有电流闭环控制算法,输出信号通过多路pwm接口404发送给x轴驱动板108和y轴驱动板110,完成对定子线圈102进行电流的驱动控制。
63.数据处理单元402使用现场可编程门阵列(field programmable gate array,fpga)进行实现,依靠其并行处理能力,以提高系统对数据处理的性能和控制效率。
64.所述数据处理单元402外部接有led状态指示模块405,用于对数据处理单元402的工作状态进行显示。
65.其它组成及连接关系与具体实施方式五相同。
66.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1